วงจรที่ช่วยให้ผู้ใช้ควบคุมความเร็วของมอเตอร์ที่เชื่อมต่อแบบเชิงเส้นโดยการหมุนโพเทนชิออมิเตอร์ที่ต่ออยู่เรียกว่าวงจรควบคุมความเร็วมอเตอร์
มีการนำเสนอวงจรควบคุมความเร็วที่ง่ายต่อการสร้างสำหรับมอเตอร์กระแสตรง 3 วงจรโดยวงจรหนึ่งใช้ MOSFET IRF540 ตัวที่สองใช้ IC 555 และแนวคิดที่สามพร้อม IC 556 ที่มีการประมวลผลแรงบิด
การออกแบบ # 1: ตัวควบคุมความเร็วมอเตอร์ DC ที่ใช้ Mosfet
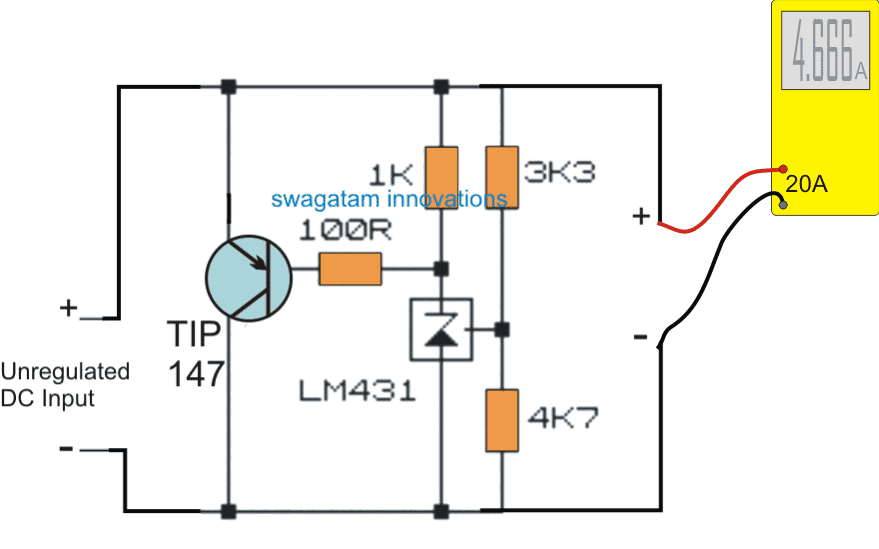
วงจรควบคุมความเร็วมอเตอร์กระแสตรงที่ยอดเยี่ยมและใช้งานง่ายสามารถสร้างได้โดยใช้มอสเฟตตัวต้านทานและหม้อตัวเดียวดังที่แสดงด้านล่าง:

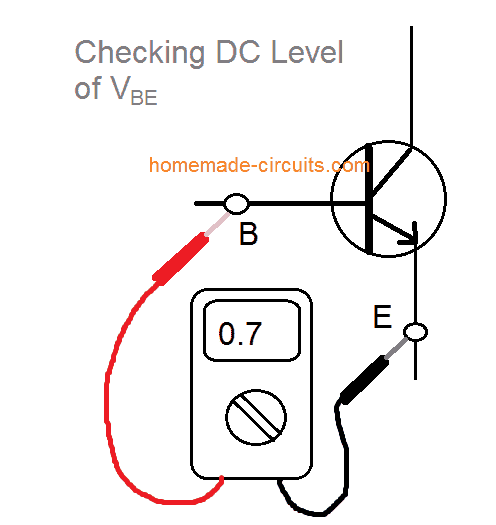
ใช้ BJT Emitter Follower

ดังที่เห็นได้ว่า mosfet เป็นผู้ติดตามต้นทางหรือโหมดท่อระบายน้ำทั่วไปหากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับการกำหนดค่านี้คุณสามารถทำได้ อ้างถึงโพสต์นี้ ซึ่งกล่าวถึงเวอร์ชัน BJT อย่างไรก็ตามหลักการทำงานยังคงเหมือนเดิม
ในการออกแบบตัวควบคุมมอเตอร์กระแสตรงข้างต้นการปรับหม้อจะสร้างความต่างศักย์ที่แตกต่างกันไปที่ประตูมอสเฟตและพินต้นทางของมอสเฟตจะทำตามค่าของความต่างศักย์นี้และปรับแรงดันไฟฟ้าข้ามมอเตอร์ให้เหมาะสม
หมายความว่าแหล่งที่มาจะอยู่ที่ 4 หรือ 5V ซึ่งล้าหลังแรงดันเกตเสมอและแปรผันขึ้น / ลงตามความแตกต่างนี้ทำให้มีแรงดันไฟฟ้าที่แตกต่างกันระหว่าง 2V และ 7V ทั่วทั้งมอเตอร์
เมื่อแรงดันเกตอยู่ที่ประมาณ 7V พินต้นทางจะจ่ายไฟต่ำสุด 2V ให้กับมอเตอร์ทำให้มอเตอร์หมุนช้ามากและ 7V จะพร้อมใช้งานบนพินต้นทางเมื่อการปรับหม้อสร้าง 12V เต็มผ่านประตูของ มอสเฟ็ท.
ที่นี่เราสามารถเห็นได้อย่างชัดเจนว่าพินแหล่งที่มาของ mosfet ดูเหมือนจะ 'ตามหลัง' ประตูและด้วยเหตุนี้ผู้ติดตามแหล่งที่มาของชื่อ
สิ่งนี้เกิดขึ้นเนื่องจากความแตกต่างระหว่างเกตและพินต้นทางของ mosfet ต้องอยู่ที่ประมาณ 5V เสมอเพื่อให้ mosfet ทำงานได้อย่างเหมาะสมที่สุด
อย่างไรก็ตามการกำหนดค่าข้างต้นช่วยในการบังคับใช้การควบคุมความเร็วที่ราบรื่นบนมอเตอร์และการออกแบบสามารถสร้างได้ค่อนข้างถูก
BJT สามารถใช้แทนมอสเฟตได้และในความเป็นจริงแล้ว BJT จะให้ช่วงการควบคุมที่สูงขึ้นประมาณ 1V ถึง 12V สำหรับมอเตอร์
วิดีโอสาธิต
https://youtu.be/W762NTuQ19gเมื่อพูดถึงการควบคุมความเร็วมอเตอร์ให้สม่ำเสมอและมีประสิทธิภาพตัวควบคุมแบบ PWM กลายเป็นตัวเลือกที่ดีที่สุดที่นี่เราจะเรียนรู้เพิ่มเติมเกี่ยวกับวงจรง่ายๆในการดำเนินการนี้
การออกแบบ # 2: PWM DC Motor Control พร้อม IC 555
การออกแบบตัวควบคุมความเร็วมอเตอร์อย่างง่ายโดยใช้ PWM อาจเข้าใจได้ดังนี้:
เริ่มแรกเมื่อเปิดวงจรขาทริกเกอร์จะอยู่ในตำแหน่งลอจิกต่ำเนื่องจากไม่ได้ชาร์จตัวเก็บประจุ C1
เงื่อนไขข้างต้นเริ่มต้นวงจรการสั่นทำให้เอาต์พุตเปลี่ยนเป็นตรรกะสูง
ตอนนี้เอาต์พุตสูงบังคับให้ตัวเก็บประจุชาร์จผ่าน D2
เมื่อถึงระดับแรงดันไฟฟ้าที่ 2/3 ของแหล่งจ่ายให้พิน # 6 ซึ่งเป็นเกณฑ์ของ IC ทริกเกอร์
โมเมนต์พิน # 6 ทริกเกอร์พิน # 3 และพิน # 7 จะเปลี่ยนกลับเป็นลอจิกต่ำ
ด้วยพิน # 3 ที่ต่ำ C1 จะเริ่มคายประจุอีกครั้งผ่าน D1 และเมื่อแรงดันไฟฟ้าทั่ว C1 ลดลงต่ำกว่าระดับที่เป็น 1/3 ของแรงดันไฟฟ้าขา # 3 และพิน # 7 จะสูงอีกครั้งทำให้วงจรตามมา และทำซ้ำ
เป็นที่น่าสนใจที่จะทราบว่า C1 มีเส้นทางที่กำหนดไว้อย่างไม่ชัดเจนสองเส้นทางสำหรับกระบวนการชาร์จและการคายประจุผ่านไดโอด D1, D2 และผ่านแขนต้านทานที่กำหนดโดยหม้อตามลำดับ
หมายความว่าผลรวมของความต้านทานที่พบโดย C1 ในขณะที่ชาร์จและการคายประจุยังคงเหมือนเดิมไม่ว่าจะตั้งค่าหม้ออย่างไรดังนั้นความยาวคลื่นของพัลส์เอาท์จึงยังคงเท่าเดิม
อย่างไรก็ตามเนื่องจากระยะเวลาการชาร์จหรือการคายประจุขึ้นอยู่กับค่าความต้านทานที่พบในเส้นทางของพวกมันหม้อจึงตั้งค่าช่วงเวลาเหล่านี้อย่างไม่เหมาะสมตามการปรับเปลี่ยน
เนื่องจากช่วงเวลาการชาร์จและการคายประจุเชื่อมต่อโดยตรงกับรอบการทำงานของเอาต์พุตจึงแตกต่างกันไปตามการปรับของหม้อโดยให้รูปแบบของพัลส์ PWM ที่ต้องการที่เอาต์พุต
ผลลัพธ์เฉลี่ยของอัตราส่วนเครื่องหมาย / พื้นที่ก่อให้เกิดเอาต์พุต PWM ซึ่งจะควบคุมความเร็ว DC ของมอเตอร์
พัลส์ PWM จะถูกป้อนไปที่ประตูของมอสเฟ็ทซึ่งทำปฏิกิริยาและควบคุมกระแสมอเตอร์ที่เชื่อมต่อเพื่อตอบสนองต่อการตั้งค่าของหม้อ
ระดับกระแสไฟฟ้าผ่านมอเตอร์จะตัดสินความเร็วและใช้เอฟเฟกต์การควบคุมผ่านหม้อ
ความถี่ของเอาต์พุตจาก IC อาจคำนวณได้ด้วยสูตร:
F = 1.44 (VR1 * C1)
สามารถเลือก mosfet ได้ตามความต้องการหรือกระแสโหลด
แผนภาพวงจรของตัวควบคุมความเร็วมอเตอร์กระแสตรงที่เสนอสามารถดูได้ด้านล่าง:

ต้นแบบ:

หลักฐานการทดสอบวิดีโอ:
https://youtu.be/M-F7MWcSiFYในคลิปวิดีโอด้านบนเราจะเห็นว่าการออกแบบตาม IC 555 ใช้สำหรับควบคุมความเร็วของมอเตอร์กระแสตรงอย่างไร อย่างที่คุณเห็นแม้ว่าหลอดไฟจะทำงานได้อย่างสมบูรณ์แบบเพื่อตอบสนองต่อ PWM และความเข้มของหลอดจะแตกต่างกันไปจากการเรืองแสงต่ำสุดไปจนถึงต่ำสุด แต่มอเตอร์ก็ไม่
ในตอนแรกมอเตอร์จะไม่ตอบสนองต่อ PWM แบบแคบ แต่จะเริ่มต้นด้วยการกระตุกหลังจากที่ PWM ถูกปรับให้มีความกว้างพัลส์ที่สูงขึ้นอย่างมีนัยสำคัญ
นี่ไม่ได้หมายความว่าวงจรมีปัญหาเนื่องจากกระดองมอเตอร์กระแสตรงถูกยึดไว้ระหว่างแม่เหล็กคู่หนึ่งอย่างแน่นหนา ในการเริ่มต้นกระดองจะต้องกระโดดการหมุนของมันข้ามขั้วทั้งสองของแม่เหล็กซึ่งไม่สามารถเกิดขึ้นได้ด้วยการเคลื่อนไหวที่ช้าและนุ่มนวล มันต้องเริ่มต้นด้วยแรงผลักดัน
นั่นเป็นเหตุผลว่าทำไมมอเตอร์จึงต้องการการปรับ PWM ที่สูงขึ้นและเมื่อเริ่มการหมุนแล้วกระดองจะได้รับพลังงานจลน์บางส่วนและตอนนี้การบรรลุความเร็วที่ช้าลงจะกลายเป็นไปได้ผ่าน PWM ที่แคบลง
อย่างไรก็ตามการหมุนไปสู่สถานะสโลว์ที่แทบจะไม่เคลื่อนที่อาจเป็นไปไม่ได้เนื่องจากเหตุผลเดียวกับที่อธิบายไว้ข้างต้น
ฉันพยายามอย่างเต็มที่เพื่อปรับปรุงการตอบสนองและบรรลุการควบคุม PWM ที่ช้าที่สุดเท่าที่จะเป็นไปได้โดยทำการปรับเปลี่ยนเล็กน้อยในแผนภาพแรกดังที่แสดงด้านล่าง:

เมื่อกล่าวเช่นนี้มอเตอร์สามารถแสดงการควบคุมที่ดีขึ้นในระดับที่ช้าลงหากติดตั้งมอเตอร์หรือรัดด้วยโหลดผ่านเกียร์หรือระบบรอก
สิ่งนี้อาจเกิดขึ้นเนื่องจากโหลดจะทำหน้าที่เป็นตัวลดแรงกระแทกและช่วยให้มีการเคลื่อนไหวที่ควบคุมได้ในระหว่างการปรับความเร็วที่ช้าลง
การออกแบบ # 3: การใช้ IC 556 สำหรับการควบคุมความเร็วขั้นสูง
การเปลี่ยนแปลงความเร็วมอเตอร์กระแสตรง อาจดูเหมือนจะไม่ยากนักและคุณอาจพบวงจรมากมายสำหรับมัน
อย่างไรก็ตามวงจรเหล่านี้ไม่รับประกันระดับแรงบิดที่สม่ำเสมอที่ความเร็วรอบมอเตอร์ต่ำทำให้การทำงานค่อนข้างไม่มีประสิทธิภาพ
ยิ่งไปกว่านั้นที่ความเร็วต่ำมากเนื่องจากแรงบิดไม่เพียงพอมอเตอร์มักจะหยุดทำงาน
ข้อเสียเปรียบที่ร้ายแรงอีกประการหนึ่งคือไม่มีคุณลักษณะการกลับตัวของมอเตอร์ที่รวมอยู่ในวงจรเหล่านี้
วงจรที่นำเสนอนั้นปราศจากข้อบกพร่องข้างต้นโดยสิ้นเชิงและสามารถสร้างและรักษาระดับแรงบิดสูงได้แม้ในความเร็วต่ำสุด
การทำงานของวงจร
ก่อนที่เราจะพูดถึงวงจรควบคุมมอเตอร์ PWM ที่เสนอเราต้องการเรียนรู้ทางเลือกที่ง่ายกว่าซึ่งไม่ค่อยมีประสิทธิภาพ อย่างไรก็ตามอาจถือได้ว่าดีพอสมควรตราบเท่าที่โหลดบนมอเตอร์ไม่สูงและตราบใดที่ความเร็วไม่ลดลงถึงระดับต่ำสุด
ภาพแสดงให้เห็นว่าสามารถใช้ 556 IC ตัวเดียวเพื่อควบคุมความเร็วของมอเตอร์ที่เชื่อมต่อได้อย่างไรเราจะไม่ลงรายละเอียดข้อเสียเปรียบประการเดียวของการกำหนดค่านี้คือแรงบิดจะแปรผันตรงกับความเร็วของมอเตอร์
กลับมาที่การออกแบบวงจรควบคุมความเร็วแรงบิดสูงที่นำเสนอที่นี่เราได้ใช้ 555 IC สองตัวแทนที่จะเป็น IC 556 ตัวเดียวหรือมากกว่าที่มี 555 IC สองตัวในชุดเดียว
แผนภูมิวงจรรวม

คุณสมบัติหลัก
เสนอสั้น ๆ ตัวควบคุมมอเตอร์กระแสตรง มีคุณสมบัติที่น่าสนใจดังต่อไปนี้:
ความเร็วสามารถเปลี่ยนแปลงได้อย่างต่อเนื่องตั้งแต่ศูนย์ถึงสูงสุดโดยไม่ต้องหยุดชะงัก
แรงบิดจะไม่ได้รับผลกระทบจากระดับความเร็วและคงที่แม้ในระดับความเร็วต่ำสุด
การหมุนของมอเตอร์สามารถพลิกหรือย้อนกลับได้ภายในเสี้ยววินาที
ความเร็วจะแปรผันตามทิศทางการหมุนของมอเตอร์
ทั้งสอง 555 ไอซี ถูกกำหนดให้มีสองฟังก์ชันแยกกัน ส่วนหนึ่งได้รับการกำหนดค่าเป็นเครื่องมัลติไวเบรเตอร์แบบ Astable ที่สร้างนาฬิกาคลื่นสี่เหลี่ยม 100 Hz ซึ่งป้อนให้กับส่วน 555 ก่อนหน้าภายในบรรจุภัณฑ์
ความถี่ข้างต้นมีหน้าที่กำหนดความถี่ของ PWM
ทรานซิสเตอร์ BC 557 ใช้เป็นแหล่งกระแสคงที่ซึ่งจะทำให้ตัวเก็บประจุที่อยู่ติดกันที่แขนตัวเก็บประจุมีประจุ
สิ่งนี้จะพัฒนาแรงดันฟันเฟืองบนตัวเก็บประจุด้านบนซึ่งเปรียบเทียบภายใน 556 IC กับแรงดันไฟฟ้าตัวอย่างที่ใช้ภายนอกเหนือพินเอาต์ที่แสดง
แรงดันไฟฟ้าตัวอย่างที่ใช้ภายนอกสามารถหาได้จากวงจรแหล่งจ่ายแรงดันไฟฟ้าตัวแปร 0-12V อย่างง่าย
แรงดันไฟฟ้าที่แตกต่างกันนี้ที่ใช้กับ 556 IC ใช้เพื่อเปลี่ยน PWM ของพัลส์ที่เอาต์พุตและในที่สุดจะใช้สำหรับการควบคุมความเร็วของมอเตอร์ที่เชื่อมต่อ
สวิตช์ S1 ใช้เพื่อย้อนกลับทิศทางมอเตอร์ทันทีเมื่อจำเป็น
ส่วนรายการ
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 โอห์ม
- R7, R8, R9, R10 = 470 โอห์ม
- C1 = 0.1 ยูเอฟ
- C2, C3 = 0.01 ยูเอฟ
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = สวิตช์สลับ SPDT
วงจรข้างต้นได้รับแรงบันดาลใจจากวงจรขับมอเตอร์ต่อไปนี้ซึ่งตีพิมพ์ในนิตยสาร elecktor electronic India
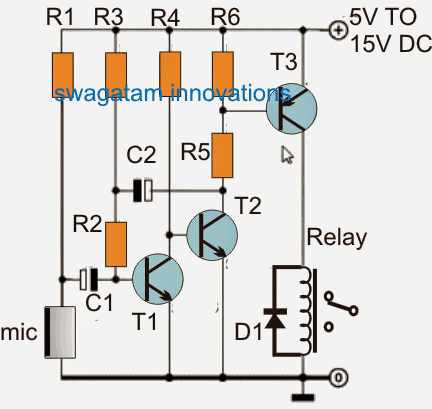
การควบคุมแรงบิดของมอเตอร์โดยใช้ IC 555

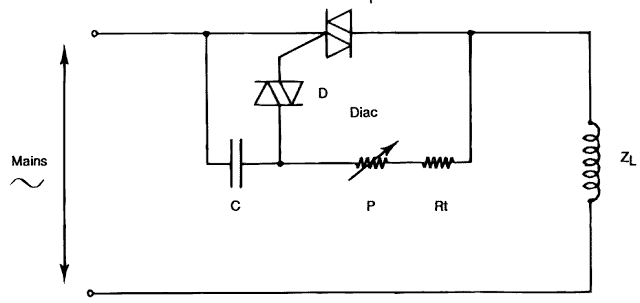
แผนภาพการควบคุมมอเตอร์แรกสามารถทำให้ง่ายขึ้นได้มากโดยใช้สวิตช์ DPDT สำหรับการดำเนินการย้อนกลับของมอเตอร์และโดยใช้ทรานซิสเตอร์ตัวส่งสัญญาณสำหรับการควบคุมความเร็วดังที่แสดงด้านล่าง:

การควบคุมมอเตอร์ที่แม่นยำโดยใช้แอมป์เดียว
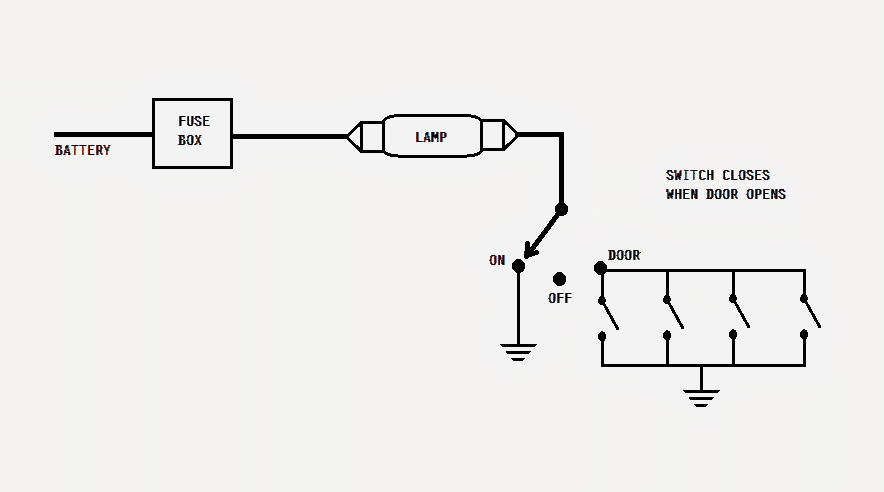
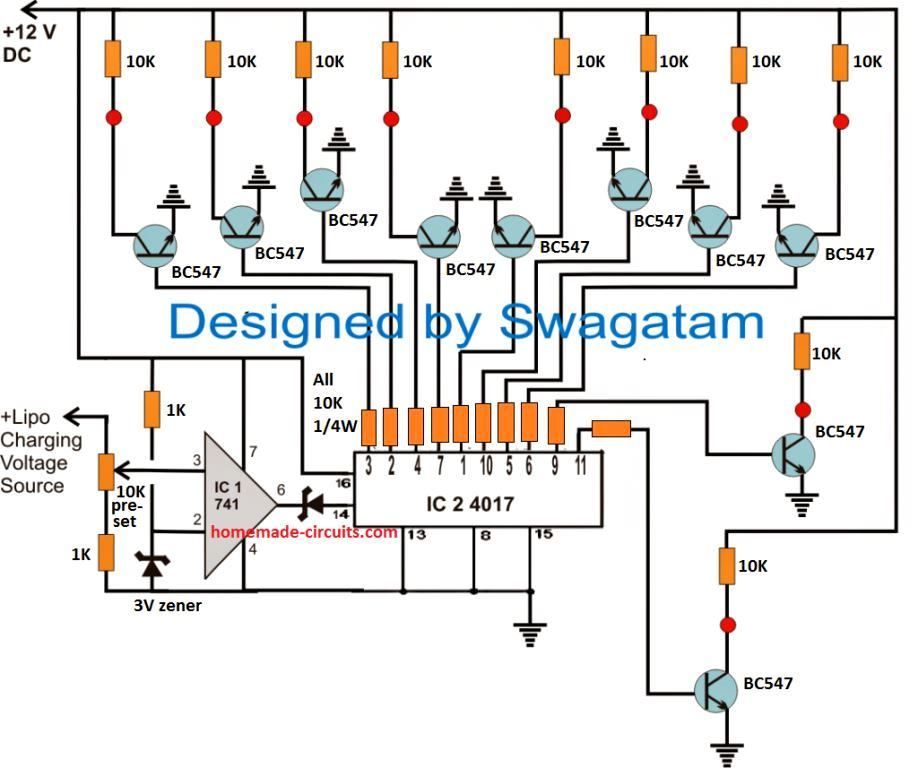
การควบคุม d.c ที่ประณีตหรือซับซ้อนมาก มอเตอร์สามารถทำได้โดยใช้ op-amp และ tacho-generator ออปแอมป์เป็นสวิตช์ที่ไวต่อแรงดันไฟฟ้า ในวงจรที่แสดงด้านล่างทันทีที่เอาท์พุทของ tacho-generator ต่ำกว่าแรงดันอ้างอิงที่ตั้งไว้ล่วงหน้าทรานซิสเตอร์สวิตชิ่งจะเปิดและจะจ่ายพลังงาน 100% ให้กับมอเตอร์
การสลับการทำงานของ op amp จะเกิดขึ้นเพียงไม่กี่มิลลิโวลต์รอบ ๆ แรงดันไฟฟ้าอ้างอิง คุณจะต้องมีแหล่งจ่ายไฟคู่ซึ่งอาจเป็นเพียงซีเนอร์ที่เสถียร

ตัวควบคุมมอเตอร์นี้ช่วยให้สามารถปรับช่วงที่ปรับได้อย่างไม่มีที่สิ้นสุดโดยไม่ต้องวุ่นวายกับกลไกใด ๆ
เอาต์พุตแอมป์ของออปแอมป์อยู่ที่ +/- 10% ของระดับรางจ่ายเท่านั้นดังนั้นจึงสามารถควบคุมความเร็วมอเตอร์ขนาดใหญ่ได้
แรงดันอ้างอิงสามารถแก้ไขได้ผ่านเทอร์มิสเตอร์หรือ LDR เป็นต้นการตั้งค่าการทดลองที่ระบุในแผนภาพวงจรใช้แอมป์ RCA 3047A และมอเตอร์ 0.25W 6V เป็นเครื่องกำเนิดไฟฟ้าแบบทาโชซึ่งสร้างรอบ 4V ที่ 13000 รอบต่อนาทีสำหรับ ข้อเสนอแนะที่ตั้งใจไว้
ก่อนหน้านี้: 3 วงจร Joule Thief ที่ดีที่สุด ถัดไป: วงจรนับนกหวีดหม้อความดัน