โพสต์นี้อธิบายถึงวงจรตั้งเวลาป้อนตู้ปลาซึ่งช่วยให้ชุดการทำงานต่อเนื่องเป็นไปตามลำดับเวลาที่กำหนดไว้ล่วงหน้าผ่านการควบคุมหม้อตามลำดับ ไมค์ขอไอเดีย
ข้อกำหนดทางเทคนิค
ฉันกำลังพยายามสร้างวงจรจับเวลาเพื่อควบคุมเครื่องให้อาหารปลาอัตโนมัติ ต้องใช้งาน 12 โวลต์ จำเป็นต้องใช้งานรีเลย์สองตัว ทั้งสองต้องมาในเวลาเดียวกัน
รีเลย์ตัวแรกต้องปิดหลังจากผ่านไป 5.2 วินาที รีเลย์ตัวที่สองต้องปิดลงหลังจากผ่านไป 7 วินาที จากนั้นกระบวนการจะต้องทำซ้ำใน 24 ชั่วโมง คุณสามารถแปลง 16 โวลต์ ac เป็น 12 โวลต์ dc
ขอบคุณไมค์ครับ
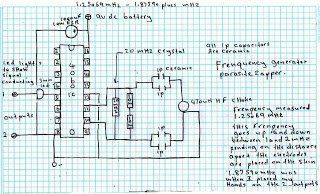
แผนภูมิวงจรรวม

การออกแบบ
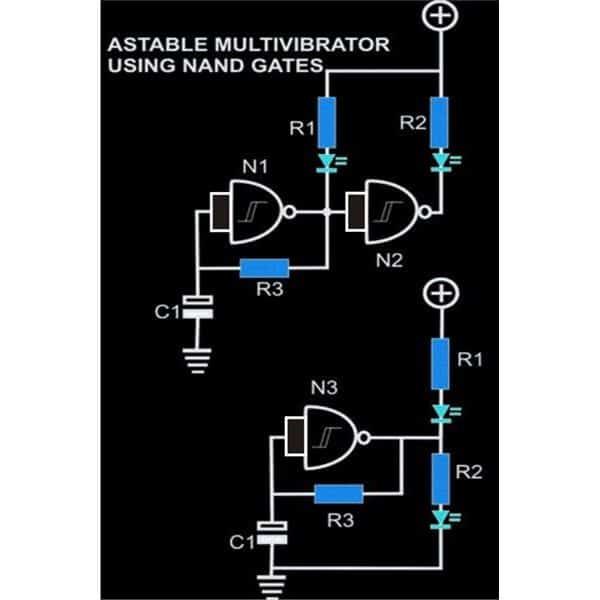
ดังที่แสดงในวงจรควบคุมตัวจับเวลาการป้อนปลาที่นำเสนอ N1, N2 และ N3, N4 เป็นประตู NAND สี่ประตูจาก IC 4093 ซึ่งกำหนดค่าเป็นขั้นตอนการจับเวลาแบบฟลิปฟล็อป
N1, N2 เป็นตัวจับเวลาการหน่วงเวลา 7 วินาทีระยะเวลาอาจถูกปรับและตั้งค่าได้ด้วยความช่วยเหลือของหม้อ 1M เหมือนกัน N3 N4 ถูกต่อสายเป็นสเตจเครื่องกำเนิดการหน่วงเวลา 5.2 วินาทีที่สอง
IC 4060 ได้รับการออกแบบให้เป็นวงจรจับเวลา 24 ชั่วโมงสำหรับการหมุนเวียนตามลำดับเวลาที่ต้องการ
เมื่อวงจรถูกขับเคลื่อนตัวเก็บประจุ 0.1uF ที่อินพุตของ N1 และ N3 จะกราวด์อินพุตตามลำดับผ่านตัวต้านทาน 100k ซึ่งจะแสดงผลสลักเชิงลบบนเอาต์พุตเกตซึ่งจะทำให้ไดรเวอร์รีเลย์ทรานซิสเตอร์ปิดอยู่
ตอนนี้สำหรับการเริ่มต้นวงจรปุ่ม 'start' จะถูกกดซึ่งจะเปลี่ยนสลักประตูกลับเป็นการเปิดสวิตช์รีเลย์พร้อมกัน เงื่อนไขนี้บังคับให้พิน 12 ของ IC 4060 สูงจนปิดการใช้งานในขณะนี้
ตามการตั้งค่าที่เสนอของหม้อ 1M หลังจากนั้นประมาณ 5 นาทีตัวเก็บประจุที่เอาต์พุต N3 จะเพิ่มขึ้นก่อนบังคับให้อินพุต N4 สูงขึ้นซึ่งจะคืนค่าสลักอีกครั้งเพื่อปิดสวิตช์รีเลย์ 5 วินาทีก่อนทุกประการ ลักษณะรีเลย์ N2 จะตามมาและได้รับการปิดหลังจาก 2 วินาทีถัดไป
สถานการณ์ข้างต้นทำให้เอาต์พุตของ N2 และอินพุตของ N1 เป็น 'ต่ำ' ซึ่งหมายความว่าตอนนี้พิน 12 ของ IC 4060 ถูกเปิดใช้งานที่ 'ต่ำ' ที่ต้องการเพื่อให้สามารถเริ่มการนับได้จนกว่าจะพ้นเวลา 24 ชั่วโมงที่กำหนดเมื่อ pin3 สูงขึ้นทำให้เกิดการทริกเกอร์อัตโนมัติของวงจรที่อธิบายข้างต้น
กระบวนการนี้จะทำซ้ำไปเรื่อย ๆ ตราบเท่าที่วงจรป้อนตู้ปลาอยู่ในสถานะขับเคลื่อน
คู่ของ: วงจรควบคุมการเติมน้ำ / ระบายน้ำในถังอุตสาหกรรม ถัดไป: การสร้าง Overunity Generator โดยใช้มอเตอร์สองตัว