ในบทความนี้เราจะพูดถึงการออกแบบวงจรซึ่งจะช่วยปรับแรงบิดของมอเตอร์เหนี่ยวนำที่ใช้ในยานยนต์ไฟฟ้าให้เหมาะสมที่สุดโดยการวิเคราะห์การใช้กระแสไฟฟ้า
การใช้ IC 555 Inverter สำหรับการควบคุม Toque
การออกแบบมีไว้สำหรับ ยานยนต์ไฟฟ้า ซึ่งออกแบบมาเพื่อทำงานร่วมกับมอเตอร์เหนี่ยวนำดังนั้นที่นี่จึงรวมอินเวอร์เตอร์สำหรับใช้งานมอเตอร์เหนี่ยวนำจากแบตเตอรี่
วงจรเพิ่มประสิทธิภาพแรงบิดอัตโนมัติที่นำเสนอสำหรับมอเตอร์เหนี่ยวนำสามารถดูได้ในแผนภาพต่อไปนี้ เนื่องจากได้รับการออกแบบมาสำหรับรถยนต์ไฟฟ้าจึงมีวงจรอินเวอร์เตอร์และสร้างขึ้นโดยใช้ IC 555

IC 555 พร้อมกับมอสเฟตและหม้อแปลงที่เกี่ยวข้องจะสร้างรูปแบบ a วงจรอินเวอร์เตอร์ที่ดี สำหรับการขับมอเตอร์เหนี่ยวนำเฟสเดียวที่ระบุจากแบตเตอรี่ 12V หรือ 24V สำหรับแบตเตอรี่ 24V จะต้องมีขั้นตอน IC
ลงไปที่ 12V ผ่านขั้นตอนการควบคุมแรงดันไฟฟ้าที่เหมาะสม
กลับมาที่การออกแบบที่แท้จริงที่นี่เราต้องตรวจสอบให้แน่ใจว่ามอเตอร์เหนี่ยวนำที่เชื่อมต่อกับหม้อแปลงเริ่มต้นด้วยความเร็วที่ต่ำลงและเริ่มได้รับโมเมนตัมความเร็วและแรงบิดเมื่อโหลด
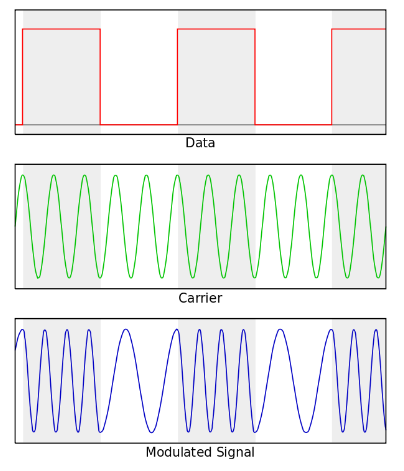
ใช้เทคนิค PWM
โดยพื้นฐานแล้วในการใช้งาน PWM กลายเป็นเทคนิคที่ดีที่สุดและในการออกแบบนี้เราก็ใช้ประโยชน์จากไฟล์ การเพิ่มประสิทธิภาพ PWM ของ IC 555 ลักษณะเฉพาะ. อย่างที่เราทราบกันดีว่าพิน # 5 ของ IC 555 สร้างแรงดันไฟฟ้าควบคุม
อินพุตของ IC ซึ่งตอบสนองต่อแรงดันไฟฟ้าที่แตกต่างกันเพื่อปรับระดับความกว้างของพัลส์ที่พิน # 3 ซึ่งหมายถึงระดับศักย์ที่สูงขึ้นที่พิน # 5 ความกว้างพัลส์ที่พิน # 3 จะกว้างขึ้นและสำหรับศักย์ที่ต่ำกว่าที่พิน # 5 ความกว้างของพัลส์ที่พิน # 3 จะแคบลง
ในการแปลข้อกำหนดโหลดเป็นแรงดันไฟฟ้าที่แตกต่างกันที่พิน # 5 เราจำเป็นต้องมีวงจรที่สามารถแปลงภาระที่เพิ่มขึ้นของมอเตอร์เหนี่ยวนำให้เป็นศักยภาพที่เพิ่มขึ้นตามสัดส่วน
ความแตกต่างที่พิน # 5 ของ IC 555
บทบาทของเซ็นเซอร์ขีด จำกัด ปัจจุบัน
ซึ่งทำได้โดยการแนะนำไฟล์ ตัวต้านทานการตรวจจับปัจจุบัน Rx ซึ่งเปลี่ยนกระแสที่เพิ่มขึ้นที่ดึงโดยโหลดให้เป็นความต่างศักย์ที่เพิ่มขึ้นตามสัดส่วน
ความแตกต่างที่อาจเกิดขึ้นนี้ถูกตรวจจับโดย BC547 และถ่ายโอนข้อมูลไปยัง LED ที่เชื่อมต่อซึ่งแท้จริงแล้วคือ LED ภายในไฟ LED ตัวเชื่อมออปโต LED / LDR ทำที่บ้านด้วยตนเอง
เมื่อความสว่างของ LED เพิ่มขึ้นเพื่อตอบสนองต่อการใช้กระแสไฟฟ้าที่เพิ่มขึ้นจากโหลดที่ต่ออยู่ความต้านทานของ LDR จะลดลงตามสัดส่วน
สามารถมองเห็น LDR เป็นส่วนหนึ่งของเครือข่ายตัวแบ่งที่มีศักยภาพในอินพุตที่ไม่กลับด้านของ Opamp ดังนั้นเมื่อความต้านทาน LDR ลดลงศักย์ที่ขา # 3 ของ opamp จะเพิ่มขึ้นซึ่งจะทำให้เกิดแรงดันไฟฟ้าที่เพิ่มขึ้นตามลำดับที่เอาต์พุต ของ opamp
สิ่งนี้เกิดขึ้นเนื่องจาก opamp ถูกกำหนดค่าเป็นวงจรตัวติดตามแรงดันไฟฟ้าซึ่งหมายความว่าข้อมูลแรงดันไฟฟ้าที่ขา # 3 จะถูกจำลองแบบที่ขาเอาต์พุต # 6 และในลักษณะขยาย
แรงดันไฟฟ้าที่เพิ่มขึ้นตามลำดับที่ขา # 6 ของ opamp เพื่อตอบสนองต่อภาระที่เพิ่มขึ้นของมอเตอร์เหนี่ยวนำจะป้อนศักยภาพที่เพิ่มขึ้นที่พิน # 5 ของ IC555 สิ่งนี้จะทำให้ PWM แคบลงเริ่มต้นที่พิน # 3 ของ IC 555 กว้างขึ้น
เมื่อสิ่งนี้เกิดขึ้นมอสเฟ็ทของอินเวอร์เตอร์จะเริ่มนำกระแสไฟฟ้าไปยังหม้อแปลงมากขึ้นทำให้สามารถจ่ายพลังงานให้กับมอเตอร์เหนี่ยวนำได้สูงขึ้นตามสัดส่วนและกระบวนการนี้จะช่วยให้โหลดทำงานได้ด้วยกำลังไฟที่มากขึ้นและเหมาะสมที่สุด
ประสิทธิภาพ.
ในทางกลับกันทันทีที่โหลดลดลงกระแสผ่าน Rx ก็จะลดลงเช่นกันซึ่งจะทำให้ความสว่างของ LED ลดลงและศักยภาพในการส่งออกของ opamps จะลดลงตามลำดับซึ่งในที่สุดก็ทำให้ IC 555 แคบลง PWM สำหรับ mosfets และลดกำลังไฟฟ้าเข้า หม้อแปลงไฟฟ้า
การใช้ Torque Optimizer สำหรับ Treadmill Motors
วงจรเพิ่มประสิทธิภาพแรงบิดที่อธิบายข้างต้นสำหรับมอเตอร์เหนี่ยวนำมีไว้สำหรับยานพาหนะไฟฟ้าอย่างไรก็ตามหากคุณสนใจที่จะใช้งานมอเตอร์กระแสตรงกำลังสูงธรรมดาเช่น มอเตอร์ดอกยาง ในกรณีนี้สามารถกำจัดส่วนของหม้อแปลงได้และมอเตอร์สามารถเชื่อมต่อโดยตรงตามที่ระบุในแผนภาพต่อไปนี้:

ฉันแน่ใจว่าคุณจะมีคำถามที่เกี่ยวข้องมากมายดังนั้นโปรดอย่าลังเลที่จะแจ้งให้พวกเขาทราบผ่านความคิดเห็นที่มีค่าของคุณ คำถามที่เกี่ยวข้องทั้งหมดของคุณจะได้รับคำตอบโดยเร็วที่สุด
คู่ของ: SG3525 วงจรอินเวอร์เตอร์แบบเต็มสะพาน ถัดไป: วงจรสวิตช์สลักลำดับ 10 ขั้นตอน