
คำจำกัดความ
มอเตอร์กระแสตรงไร้แปรงถ่านประกอบด้วยโรเตอร์ในรูปของแม่เหล็กถาวรและสเตเตอร์ในรูปแบบของขดลวดกระดองโพลีเฟส มันแตกต่างจากมอเตอร์ dc ทั่วไปตรงที่ไม่มีแปรงและการเปลี่ยนจะทำโดยใช้ไฟฟ้าโดยใช้ไดรฟ์อิเล็กทรอนิกส์เพื่อป้อนขดลวดสเตเตอร์
โดยทั่วไปมอเตอร์ BLDC สามารถสร้างได้สองวิธีโดยวางโรเตอร์ไว้ด้านนอกแกนและขดลวดในแกนและอีกอันหนึ่งโดยวางขดลวดไว้นอกแกน ในการจัดเรียงในอดีตแม่เหล็กของโรเตอร์ทำหน้าที่เป็นฉนวนและลดอัตราการกระจายความร้อนจากมอเตอร์และทำงานที่กระแสไฟฟ้าต่ำ โดยทั่วไปจะใช้ในพัดลม ในการจัดเรียงหลังมอเตอร์จะกระจายความร้อนมากขึ้นจึงทำให้แรงบิดเพิ่มขึ้น ใช้ในฮาร์ดดิสก์ไดรฟ์

BLDC
การทำงานของมอเตอร์ 4 ขั้ว 2 เฟส
มอเตอร์กระแสตรงไร้แปรงถ่านขับเคลื่อนด้วยไดรฟ์อิเล็กทรอนิกส์ที่สลับแรงดันไฟฟ้าระหว่างขดลวดสเตเตอร์เมื่อโรเตอร์หมุน ตำแหน่งโรเตอร์ถูกตรวจสอบโดยทรานสดิวเซอร์ (ออปติคัลหรือแม่เหล็ก) ซึ่งส่งข้อมูลไปยังคอนโทรลเลอร์อิเล็กทรอนิกส์และขึ้นอยู่กับตำแหน่งนี้ขดลวดสเตเตอร์ที่จะได้รับพลังงานจะถูกกำหนด ไดรฟ์อิเล็กทรอนิกส์นี้ประกอบด้วยทรานซิสเตอร์ (2 ตัวสำหรับแต่ละเฟส) ซึ่งทำงานผ่านไมโครโปรเซสเซอร์

BLDC-DC
สนามแม่เหล็กที่สร้างโดยแม่เหล็กถาวรจะโต้ตอบกับสนามที่เกิดจากกระแสในขดลวดสเตเตอร์ทำให้เกิดแรงบิดเชิงกล วงจรสวิตชิ่งอิเล็กทรอนิกส์หรือไดรฟ์จะเปลี่ยนกระแสจ่ายไปที่สเตเตอร์เพื่อรักษามุมคงที่ 0 ถึง 90 องศาระหว่างฟิลด์โต้ตอบ เซ็นเซอร์ฮอลล์ส่วนใหญ่จะติดตั้งบนสเตเตอร์หรือบนโรเตอร์ เมื่อโรเตอร์ผ่านเซ็นเซอร์ฮอลล์ตามขั้วโลกเหนือหรือขั้วโลกใต้จะสร้างสัญญาณสูงหรือต่ำ ขึ้นอยู่กับการรวมกันของสัญญาณเหล่านี้การคดเคี้ยวจะถูกกำหนด เพื่อให้มอเตอร์ทำงานต่อไปสนามแม่เหล็กที่เกิดจากขดลวดควรเปลี่ยนตำแหน่งเนื่องจากโรเตอร์เคลื่อนที่ไปตามสนามสเตเตอร์

วงจร
ใน 4 เสามอเตอร์กระแสตรงไร้แปรงถ่าน 2 เฟสใช้เซ็นเซอร์ห้องโถงเดี่ยวซึ่งฝังอยู่บนสเตเตอร์ ขณะที่โรเตอร์หมุนเซ็นเซอร์ฮอลล์จะตรวจจับตำแหน่งและพัฒนาสัญญาณสูงหรือต่ำขึ้นอยู่กับขั้วของแม่เหล็ก (ทิศเหนือหรือทิศใต้) เซ็นเซอร์ฮอลล์เชื่อมต่อผ่านตัวต้านทานกับทรานซิสเตอร์ เมื่อสัญญาณไฟฟ้าแรงสูงเกิดขึ้นที่เอาท์พุทของเซ็นเซอร์ทรานซิสเตอร์ที่เชื่อมต่อกับขดลวด A จะเริ่มดำเนินการโดยจัดเตรียมเส้นทางให้กระแสไหลและทำให้ขดลวดกระตุ้น A ตัวเก็บประจุจะเริ่มชาร์จไปยังแรงดันไฟฟ้าเต็ม เมื่อเซ็นเซอร์ฮอลล์ตรวจพบการเปลี่ยนแปลงขั้วของโรเตอร์จะพัฒนาสัญญาณแรงดันไฟฟ้าต่ำที่เอาต์พุตและเนื่องจากทรานซิสเตอร์ 1 ไม่ได้รับแหล่งจ่ายใด ๆ จึงอยู่ในสภาพตัด แรงดันไฟฟ้าที่พัฒนารอบตัวเก็บประจุคือ Vcc ซึ่งเป็นแรงดันไฟฟ้าที่จ่ายให้กับ 2ndทรานซิสเตอร์และขดลวด B ได้รับพลังงานแล้วเมื่อกระแสไหลผ่าน
มอเตอร์ BLDC มีแม่เหล็กถาวรคงที่ซึ่งหมุนและกระดองคงที่ช่วยขจัดปัญหาในการเชื่อมต่อกระแสกับกระดองเคลื่อนที่ และอาจมีเสาบนโรเตอร์มากกว่าสเตเตอร์หรือมอเตอร์แบบไม่เต็มใจ หลังอาจไม่มีแม่เหล็กถาวรเพียงแค่เสาที่เหนี่ยวนำบนโรเตอร์แล้วดึงเข้าสู่การจัดเรียงโดยขดลวดสเตเตอร์ที่กำหนดเวลาไว้ ตัวควบคุมอิเล็กทรอนิกส์แทนที่ชุดแปรง / คอมมิวเตเตอร์ของมอเตอร์กระแสตรงแบบแปรงซึ่งจะเปลี่ยนเฟสเป็นขดลวดอย่างต่อเนื่องเพื่อให้มอเตอร์หมุน คอนโทรลเลอร์จะทำการกระจายกำลังไฟฟ้าตามกำหนดเวลาโดยเปรียบเทียบโดยใช้วงจรโซลิดสเตตแทนระบบแปรง / สับเปลี่ยน

มอเตอร์ BLDC
ข้อดี 7 ประการของมอเตอร์กระแสตรงไร้แปรงถ่าน
- ความเร็วที่ดีขึ้นเมื่อเทียบกับลักษณะของแรงบิด
- การตอบสนองแบบไดนามิกสูง
- ประสิทธิภาพสูง
- อายุการใช้งานยาวนานเนื่องจากไม่มีการสูญเสียทางไฟฟ้าและแรงเสียดทาน
- การทำงานที่ไม่มีเสียง
- ช่วงความเร็วที่สูงขึ้น
การใช้งาน:
ค่าใช้จ่ายของมอเตอร์กระแสตรงไร้แปรงถ่านลดลงตั้งแต่การนำเสนอเนื่องจากความก้าวหน้าในด้านวัสดุและการออกแบบ ต้นทุนที่ลดลงนี้ประกอบกับจุดโฟกัสจำนวนมากที่มีเหนือ Brush DC Motor ทำให้ Brushless DC Motor เป็นส่วนประกอบยอดนิยมในการใช้งานที่โดดเด่นมากมาย แอพพลิเคชั่นที่ใช้ BLDC Motor รวมถึง แต่ไม่ จำกัด เฉพาะ:
- เครื่องใช้ไฟฟ้า
- ขนส่ง
- เครื่องทำความร้อนและการระบายอากาศ
- วิศวกรรมอุตสาหการ
- วิศวกรรมแบบจำลอง
หลักการทำงาน
หลักการทำงานของมอเตอร์ BLDC เหมือนกับมอเตอร์กระแสตรงแบบแปรงเช่นความคิดเห็นเกี่ยวกับตำแหน่งเพลาภายใน ในกรณีของมอเตอร์กระแสตรงแบบแปรงข้อเสนอแนะจะดำเนินการโดยใช้ตัวสับเปลี่ยนเชิงกลและแปรง ภายในมอเตอร์ BLDC สามารถทำได้โดยใช้เซ็นเซอร์ป้อนกลับหลายตัว ในมอเตอร์ BLDC เราส่วนใหญ่ใช้เซ็นเซอร์ Hall-effect เมื่อใดก็ตามที่ขั้วแม่เหล็กของโรเตอร์ผ่านใกล้เซ็นเซอร์ฮอลล์พวกมันจะสร้างสัญญาณระดับสูงหรือต่ำซึ่งสามารถใช้เพื่อกำหนดตำแหน่งของเพลาได้ หากทิศทางของสนามแม่เหล็กกลับด้านแรงดันไฟฟ้าที่พัฒนาก็จะกลับด้านเช่นกัน
การควบคุมมอเตอร์ BLDC
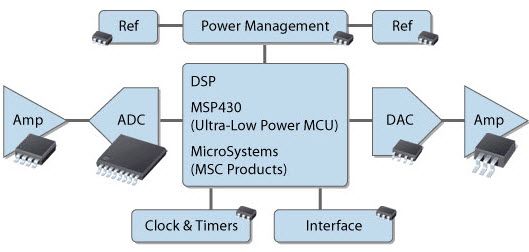
หน่วยควบคุมดำเนินการโดยไมโครอิเล็กทรอนิกส์มีตัวเลือกไฮเทคมากมาย สามารถใช้งานได้โดยใช้ไมโครคอนโทรลเลอร์ไมโครคอนโทรลเลอร์เฉพาะหน่วยไมโครอิเล็กทรอนิกส์แบบใช้สายแบบแข็ง PLC หรือยูนิตอื่นที่คล้ายกัน
ตัวควบคุมอนาล็อกยังคงใช้งานอยู่ แต่ไม่สามารถประมวลผลข้อความตอบกลับและควบคุมตามนั้นได้ ด้วยวงจรควบคุมประเภทนี้คุณสามารถใช้อัลกอริธึมการควบคุมที่มีประสิทธิภาพสูงเช่นการควบคุมเวกเตอร์การควบคุมเชิงสนามการควบคุมความเร็วสูงซึ่งทั้งหมดนี้เกี่ยวข้องกับสถานะแม่เหล็กไฟฟ้าของมอเตอร์ นอกจากนี้การควบคุมวงรอบนอกสำหรับข้อกำหนดด้านพลศาสตร์ต่างๆเช่นการควบคุมมอเตอร์แบบเลื่อนการควบคุมแบบปรับตัวการควบคุมแบบคาดการณ์ ... ฯลฯ ยังถูกนำไปใช้ตามอัตภาพ
นอกจากนี้เรายังพบ PIC ประสิทธิภาพสูง (Power Integrated Circuit), ASIC (วงจรรวมเฉพาะแอปพลิเคชัน) … ฯลฯ ที่สามารถลดความซับซ้อนของการสร้างส่วนควบคุมและหน่วยอิเล็กทรอนิกส์กำลังได้อย่างมาก ตัวอย่างเช่นวันนี้เรามีตัวควบคุม PWM (Pulse Width Modulation) ที่สมบูรณ์ใน IC ตัวเดียวที่สามารถแทนที่ชุดควบคุมทั้งหมดในบางระบบได้ IC ไดรเวอร์แบบผสมสามารถให้โซลูชันที่สมบูรณ์ในการขับเคลื่อนสวิตช์เปิด / ปิดทั้งหกตัวในตัวแปลงสามเฟส มีวงจรรวมที่คล้ายกันมากมายซึ่งเพิ่มมากขึ้นทุกวัน ในตอนท้ายของวันการประกอบระบบอาจเกี่ยวข้องกับซอฟต์แวร์ควบคุมเพียงชิ้นเดียวกับฮาร์ดแวร์ทั้งหมดที่มีรูปร่างและรูปแบบที่ถูกต้อง
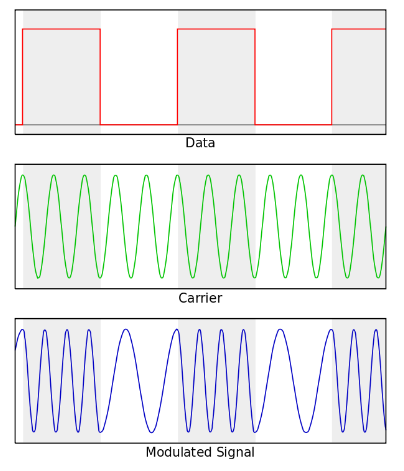
สามารถใช้คลื่น PWM (Pulse Width Modulation) เพื่อควบคุมความเร็วของมอเตอร์ ที่นี่จะได้รับแรงดันไฟฟ้าเฉลี่ยหรือกระแสเฉลี่ยที่ไหลผ่านมอเตอร์จะเปลี่ยนไปขึ้นอยู่กับเวลาเปิดและปิดของพัลส์ที่ควบคุมความเร็วของมอเตอร์นั่นคือรอบการทำงานของคลื่นควบคุมความเร็ว ในการเปลี่ยนรอบการทำงาน (เวลา ON) เราสามารถเปลี่ยนความเร็วได้ การเปลี่ยนพอร์ตเอาต์พุตจะทำให้ทิศทางของมอเตอร์เปลี่ยนไปอย่างมีประสิทธิภาพ
ควบคุมความเร็ว
การควบคุมความเร็วของมอเตอร์ BLDC เป็นสิ่งจำเป็นสำหรับการทำให้มอเตอร์ทำงานในอัตราที่ต้องการ ความเร็วของมอเตอร์กระแสตรงแบบไม่มีแปรงสามารถควบคุมได้โดยการควบคุมแรงดันไฟฟ้ากระแสตรงอินพุต ยิ่งแรงดันไฟฟ้าสูงเท่าไหร่ก็ยิ่งมีความเร็วมากขึ้นเท่านั้น เมื่อมอเตอร์ทำงานในโหมดปกติหรือทำงานต่ำกว่าความเร็วที่กำหนดแรงดันไฟฟ้าขาเข้าของกระดองจะเปลี่ยนไปตามแบบ PWM เมื่อมอเตอร์ทำงานสูงกว่าความเร็วที่กำหนดฟลักซ์จะอ่อนตัวลงโดยการเพิ่มกระแสออก
การควบคุมความเร็วสามารถควบคุมวงปิดหรือวงเปิด
Open Loop Speed Control - เกี่ยวข้องกับการควบคุมแรงดันไฟฟ้ากระแสตรงที่ใช้กับขั้วมอเตอร์โดยการตัดแรงดันไฟฟ้ากระแสตรง อย่างไรก็ตามสิ่งนี้ส่งผลให้เกิดการ จำกัด กระแสบางรูปแบบ
การควบคุมความเร็ววงปิด - เกี่ยวข้องกับการควบคุมแรงดันไฟฟ้าอินพุตผ่านการตอบสนองความเร็วจากมอเตอร์ ดังนั้นแรงดันไฟฟ้าจะถูกควบคุมขึ้นอยู่กับสัญญาณข้อผิดพลาด
การควบคุมความเร็ววงปิดประกอบด้วยองค์ประกอบพื้นฐานสามส่วน
- วงจร PWM เพื่อสร้างพัลส์ PWM ที่ต้องการ อาจเป็นได้ทั้งไมโครคอนโทรลเลอร์หรือ IC จับเวลา
- อุปกรณ์ตรวจจับเพื่อตรวจจับความเร็วมอเตอร์จริง อาจเป็นเซ็นเซอร์เอฟเฟกต์ห้องโถงเซ็นเซอร์อินฟราเรดหรือตัวเข้ารหัสแสง
- มอเตอร์ขับเคลื่อนเพื่อควบคุมการทำงานของมอเตอร์
เทคนิคการเปลี่ยนแรงดันไฟฟ้าตามสัญญาณข้อผิดพลาดนี้สามารถทำได้โดยใช้เทคนิคการควบคุม pid หรือใช้ฟัซซีลอจิก
การประยุกต์ใช้เพื่อควบคุมความเร็วของมอเตอร์ไฟฟ้ากระแสตรงไร้แปรงถ่าน

การควบคุมมอเตอร์ BLDC DC
การทำงานของมอเตอร์ถูกควบคุมโดยใช้ออปโตคัปเปลอร์และการจัดเรียง MOSFET ซึ่งกำลังไฟฟ้ากระแสตรงเข้าควบคุมผ่านเทคนิค PWM จากไมโครคอนโทรลเลอร์ ขณะที่มอเตอร์หมุนไฟ LED อินฟราเรดที่อยู่ที่เพลาจะสว่างขึ้นด้วยแสงสีขาวเนื่องจากมีจุดสีขาวบนเพลาและสะท้อนแสงอินฟราเรด โฟโตไดโอดรับแสงอินฟราเรดนี้และได้รับการเปลี่ยนแปลงความต้านทานจึงทำให้แรงดันไฟฟ้าของทรานซิสเตอร์ที่เชื่อมต่อเปลี่ยนไปและพัลส์จะถูกส่งไปยังไมโครคอนโทรลเลอร์เพื่อสร้างจำนวนการหมุนต่อนาที ความเร็วนี้จะแสดงบนจอ LCD
ป้อนความเร็วที่ต้องการในปุ่มกดที่เชื่อมต่อกับไมโครคอนโทรลเลอร์ ความแตกต่างระหว่างความเร็วที่ตรวจจับและความเร็วที่ต้องการคือสัญญาณข้อผิดพลาดและไมโครคอนโทรลเลอร์สร้างสัญญาณ PWM ตามสัญญาณข้อผิดพลาดขึ้นอยู่กับตรรกะฟัซซีเพื่อให้อินพุตไฟฟ้ากระแสตรงไปยังมอเตอร์
ดังนั้นการใช้การควบคุมวงปิดจึงสามารถควบคุมความเร็วของมอเตอร์กระแสตรงแบบไม่ใช้แปรงถ่านและสามารถหมุนด้วยความเร็วที่ต้องการได้
เครดิตภาพ:









{kind=link}