บทความที่นำเสนอในที่นี้จะอธิบายวงจรควบคุมความเร็วมอเตอร์ AC แบบวงปิดที่เรียบง่ายซึ่งอาจใช้สำหรับควบคุมความเร็วมอเตอร์ AC เฟสเดียว
วงจรมีราคาถูกมากและใช้ชิ้นส่วนอิเล็กทรอนิกส์ธรรมดาสำหรับการใช้งานที่จำเป็น คุณสมบัติหลักของวงจรคือเป็นประเภทวงปิดซึ่งหมายความว่าความเร็วหรือแรงบิดของมอเตอร์จะไม่ได้รับผลกระทบจากโหลดหรือความเร็วของมอเตอร์ในวงจรนี้ในทางตรงกันข้ามแรงบิดจะเป็นสัดส่วนทางอ้อมกับ ขนาดของความเร็ว
การทำงานของวงจร:
การอ้างถึงแผนภาพวงจรของตัวควบคุมมอเตอร์กระแสสลับแบบวงปิดเฟสเดียวที่เสนอการดำเนินการที่เกี่ยวข้องอาจเข้าใจได้ผ่านประเด็นต่อไปนี้:
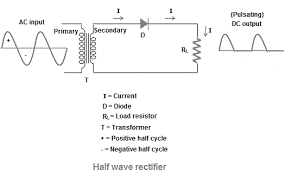
สำหรับครึ่งรอบบวกของอินพุต AC ตัวเก็บประจุ C2 จะถูกชาร์จผ่านตัวต้านทาน R1 และไดโอด D1

การชาร์จ C2 ยังคงอยู่จนกว่าแรงดันไฟฟ้าของตัวเก็บประจุนี้จะเทียบเท่ากับแรงดันไฟฟ้าซีเนอร์จำลองของการกำหนดค่า
วงจรที่ต่อรอบทรานซิสเตอร์ T1 จำลองการทำงานของซีเนอร์ไดโอดได้อย่างมีประสิทธิภาพ
การรวมหม้อ P1 ทำให้สามารถปรับแรงดันไฟฟ้าของ 'ซีเนอร์ไดโอด' นี้ได้ พูดได้อย่างแม่นยำแรงดันไฟฟ้าที่พัฒนาใน T1 นั้นถูกกำหนดโดยอัตราส่วนระหว่างตัวต้านทาน R3 และ R2 + P1 อย่างแท้จริง
แรงดันไฟฟ้าข้ามตัวต้านทาน R4 จะถูกรักษาไว้เสมอเท่ากับ 0.6 โวลต์ซึ่งเท่ากับแรงดันไฟฟ้าที่ต้องการของแรงดันไฟฟ้าตัวปล่อยฐานของ T1
ดังนั้นจึงหมายความว่าแรงดันซีเนอร์ที่อธิบายไว้ข้างต้นควรเท่ากับค่าที่อาจได้มาจากการแก้นิพจน์:
(P1 + R2 + R3 / R3) × 0.6
รายการชิ้นส่วนสำหรับวงจรควบคุมความเร็วมอเตอร์ AC แบบวงปิดด้านบน
- R1 = 39K,
- R2 = 12K,
- R3 = 22K,
- R4 = 68K,
- P1 = 220K,
- ไดโอดทั้งหมด = 1N4007
- C1 = 0.1 / 400V,
- C2 = 100uF / 35V,
- T1 = BC547B,
- SCR = C106
- L1 = 30 รอบของสาย 25 SWG บนแกนเฟอร์ไรต์ 3 มม. หรือ 40 uH / 5 วัตต์
วิธีวางตำแหน่งโหลดด้วยเหตุผลพิเศษ
การตรวจสอบอย่างรอบคอบพบว่ามอเตอร์หรือโหลดไม่ได้รับการแนะนำในตำแหน่งปกติ แต่จะต่อสายหลัง SCR ที่แคโทด
สิ่งนี้ทำให้เกิดคุณลักษณะที่น่าสนใจที่จะนำมาใช้กับวงจรนี้
ตำแหน่งพิเศษข้างต้นของมอเตอร์ภายในวงจรทำให้เวลาในการยิงของ SCR ขึ้นอยู่กับความต่างศักย์ระหว่าง EMF ด้านหลังของมอเตอร์และ 'แรงดันไฟฟ้าซีเนอร์' ของวงจร
นั่นหมายความว่ายิ่งมอเตอร์โหลดมากเท่าไหร่ SCR ก็จะยิงได้เร็วขึ้นเท่านั้น
ขั้นตอนนี้ค่อนข้างจำลองประเภทการทำงานของวงปิดซึ่งข้อเสนอแนะที่ได้รับในรูปแบบของ EMF ด้านหลังที่สร้างขึ้นโดยมอเตอร์เอง
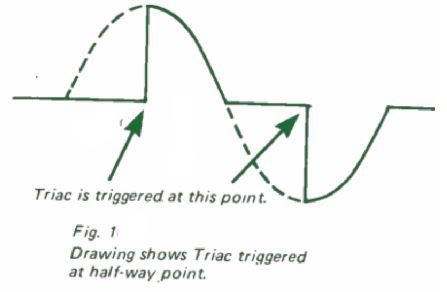
อย่างไรก็ตามวงจรเกี่ยวข้องกับข้อเสียเปรียบเล็กน้อย การใช้ SCR หมายความว่าวงจรสามารถรองรับการควบคุมเฟสได้เพียง 180 องศาและไม่สามารถควบคุมมอเตอร์ได้ตลอดช่วงความเร็ว แต่มีเพียง 50% เท่านั้น
ข้อเสียอีกประการหนึ่งที่เกี่ยวข้องเนื่องจากลักษณะที่ไม่แพงของวงจรคือมอเตอร์มีแนวโน้มที่จะเกิดอาการสะอึกที่ความเร็วต่ำกว่าอย่างไรก็ตามเมื่อความเร็วเพิ่มขึ้นปัญหานี้จะหายไปโดยสิ้นเชิง
ฟังก์ชันของ L1 และ C1
รวม L1 และ C1 สำหรับการตรวจสอบ RF ความถี่สูงที่สร้างขึ้นเนื่องจากการสับเฟสอย่างรวดเร็วโดย SCR
ไม่จำเป็นต้องพูดว่าอุปกรณ์ (SCR) ต้องติดตั้งบนฮีทซิงค์ที่เหมาะสมเพื่อให้ได้ผลลัพธ์ที่ดีที่สุด
ย้อนกลับ EMF Drill Speed Controller Circuit
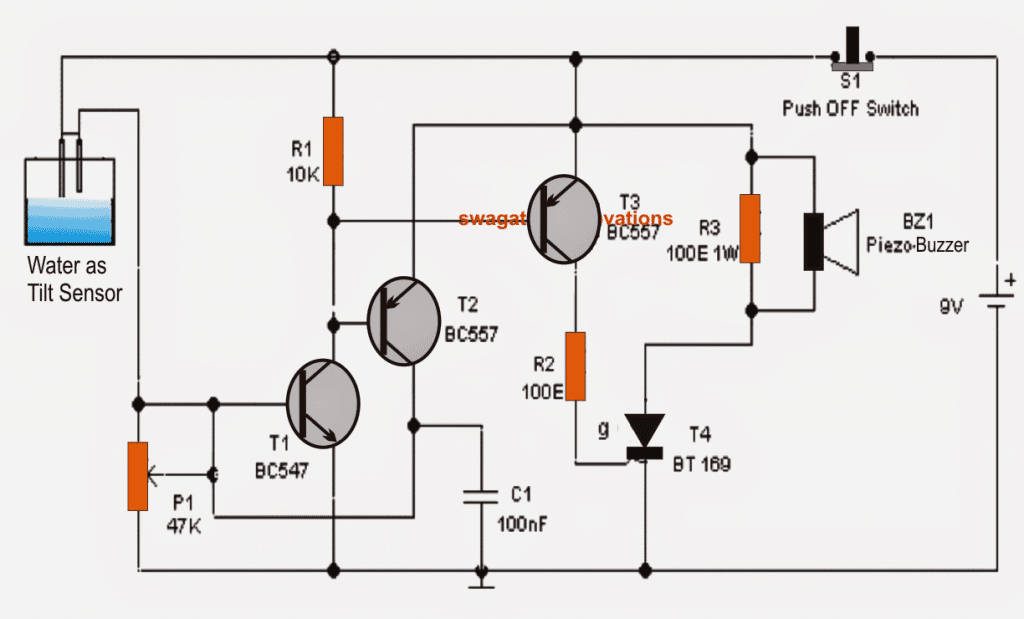
วงจรนี้ใช้เป็นหลักในการควบคุมความเร็วคงที่ของมอเตอร์แบบแผลขนาดเล็กดังที่พบในสว่านมือไฟฟ้าหลายตัวเป็นต้นแรงบิดและความเร็วจะถูกควบคุมโดยโพเทนชิออมิเตอร์ P1 การกำหนดค่าโพเทนชิออมิเตอร์นี้ระบุว่าไตรแอกสามารถกระตุ้นได้อย่างไร

เมื่อความเร็วของมอเตอร์ลดลงต่ำกว่าค่าที่ตั้งไว้ (เมื่อเชื่อมต่อกับโหลด) EMF ด้านหลังของมอเตอร์จะลดลง เป็นผลให้แรงดันไฟฟ้ารอบ ๆ ผ่าน R1, P1 และ C5 เพิ่มขึ้นเพื่อให้ Triac ทำงานก่อนหน้านี้และความเร็วของมอเตอร์มีแนวโน้มที่จะเพิ่มขึ้น มีความเสถียรของความเร็วในสัดส่วนที่แน่นอนในลักษณะนี้
ก่อนหน้านี้: วิธีผลิตไฟฟ้าจากน้ำทะเล - 2 วิธีง่ายๆ ถัดไป: วงจรสวิตช์ควบคุมระยะไกลโทรศัพท์มือถือที่ใช้ระบบ GSM