อย่างไรก็ตามกระบวนการจะรักษาความสัมพันธ์ P = I x V ไว้เสมอซึ่งหมายความว่าเมื่อเอาต์พุตของตัวแปลงเพิ่มแรงดันไฟฟ้าขาเข้าเอาต์พุตจะได้รับการลดลงของกระแสตามสัดส่วนซึ่งทำให้กำลังขับเกือบจะเท่ากับอินพุต กำลังไฟฟ้าหรือน้อยกว่ากำลังไฟฟ้าเข้า
Boost Converter ทำงานอย่างไร
ตัวแปลงบูสต์เป็นแหล่งจ่ายไฟ SMPS หรือโหมดสวิตช์ซึ่งโดยพื้นฐานแล้วจะทำงานร่วมกับเซมิคอนดักเตอร์ที่ใช้งานอยู่สองตัว (ทรานซิสเตอร์และไดโอด) และมีส่วนประกอบแบบพาสซีฟอย่างน้อยหนึ่งชิ้นในรูปแบบของตัวเก็บประจุหรือตัวเหนี่ยวนำหรือทั้งสองอย่างเพื่อประสิทธิภาพที่ดีขึ้นตัวเหนี่ยวนำที่นี่โดยทั่วไปใช้สำหรับการเพิ่มแรงดันไฟฟ้าและตัวเก็บประจุถูกนำมาใช้เพื่อกรองความผันผวนของการสลับและเพื่อลดการกระเพื่อมของกระแสที่เอาต์พุตของตัวแปลง
แหล่งจ่ายไฟอินพุตที่อาจจำเป็นต้องได้รับการเพิ่มหรือเพิ่มขึ้นสามารถหาได้จากแหล่ง DC ที่เหมาะสมเช่นแบตเตอรี่แผงโซลาร์เซลล์เครื่องกำเนิดไฟฟ้าที่ใช้มอเตอร์เป็นต้น
หลักการดำเนินงาน
ตัวเหนี่ยวนำในตัวแปลงบูสต์มีส่วนสำคัญในการเพิ่มแรงดันไฟฟ้าขาเข้า
สิ่งสำคัญที่ต้องรับผิดชอบในการกระตุ้นแรงดันไฟฟ้าจากตัวเหนี่ยวนำเกิดจากคุณสมบัติโดยธรรมชาติของการต่อต้านหรือต่อต้านกระแสที่เหนี่ยวนำอย่างกะทันหันและเนื่องจากการตอบสนองต่อสิ่งนี้ด้วยการสร้างสนามแม่เหล็กและทำลายแม่เหล็กในเวลาต่อมา ฟิลด์ การทำลายจะนำไปสู่การปลดปล่อยพลังงานที่กักเก็บไว้
กระบวนการข้างต้นนี้ส่งผลให้เกิดการจัดเก็บกระแสในตัวเหนี่ยวนำและดึงกระแสที่เก็บไว้นี้กลับไปที่เอาต์พุตในรูปแบบของ EMF ย้อนกลับ
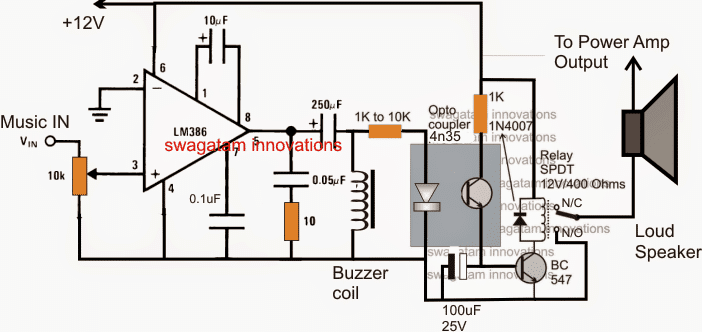
วงจรขับทรานซิสเตอร์รีเลย์ถือได้ว่าเป็นตัวอย่างที่ดีของวงจรบูสคอนเวอร์เตอร์ ไดโอดฟลายแบ็คที่เชื่อมต่อผ่านรีเลย์ถูกนำมาใช้เพื่อลัดวงจร EMF ย้อนกลับจากขดลวดรีเลย์และเพื่อป้องกันทรานซิสเตอร์ทุกครั้งที่ปิดเครื่อง
หากถอดไดโอดนี้ออกและมีการเชื่อมต่อวงจรเรียงกระแสตัวเก็บประจุไดโอดผ่านตัวเก็บ / ตัวปล่อยของทรานซิสเตอร์แรงดันไฟฟ้าที่เพิ่มขึ้นจากขดลวดรีเลย์จะถูกรวบรวมผ่านตัวเก็บประจุนี้

กระบวนการในการออกแบบตัวแปลงบูสต์ส่งผลให้แรงดันเอาต์พุตสูงกว่าแรงดันไฟฟ้าขาเข้าเสมอ
การกำหนดค่า Boost Converter
จากรูปต่อไปนี้เราจะเห็นการกำหนดค่าคอนฟิกบูสต์คอนเวอร์เตอร์มาตรฐานรูปแบบการทำงานอาจเข้าใจได้ตามที่ระบุไว้ใน:เมื่ออุปกรณ์ที่แสดง (ซึ่งอาจเป็นพลังงานมาตรฐาน BJT หรือ mosfet) ถูกเปิดกระแสไฟฟ้าจากแหล่งจ่ายอินพุตจะเข้าสู่ตัวเหนี่ยวนำและไหลตามเข็มนาฬิกาผ่านทรานซิสเตอร์เพื่อทำวงจรที่ปลายด้านลบของแหล่งจ่ายอินพุต

ในระหว่างกระบวนการข้างต้นตัวเหนี่ยวนำจะสัมผัสกับกระแสไฟฟ้าในตัวเองอย่างกะทันหันและพยายามต้านทานการไหลเข้าซึ่งส่งผลให้มีการจัดเก็บกระแสไฟฟ้าจำนวนหนึ่งไว้ในนั้นผ่านการสร้างสนามแม่เหล็ก
ในลำดับถัดมาเมื่อทรานซิสเตอร์ปิดอยู่การนำกระแสไฟฟ้าหยุดพัก แต่อีกครั้งบังคับให้เปลี่ยนระดับปัจจุบันอย่างกะทันหันในตัวเหนี่ยวนำ ตัวเหนี่ยวนำตอบสนองต่อสิ่งนี้โดยการย้อนกลับหรือปล่อยกระแสไฟฟ้าที่เก็บไว้ เนื่องจากทรานซิสเตอร์อยู่ในตำแหน่ง OFF พลังงานนี้จะค้นหาเส้นทางผ่านไดโอด D และข้ามขั้วเอาท์พุทที่แสดงในรูปของแรงดันไฟฟ้า EMF ด้านหลัง

ตัวเหนี่ยวนำทำสิ่งนี้โดยทำลายสนามแม่เหล็กซึ่งสร้างขึ้นก่อนหน้านี้ในขณะที่ทรานซิสเตอร์อยู่ในโหมดเปิดสวิตช์
อย่างไรก็ตามกระบวนการปล่อยพลังงานข้างต้นจะถูกนำไปใช้กับขั้วตรงข้ามดังนั้นแรงดันไฟฟ้าอินพุตจะกลายเป็นอนุกรมโดยมีแรงดันไฟฟ้ากลับของตัวเหนี่ยวนำกลับ และอย่างที่เราทราบกันดีว่าเมื่อแหล่งจ่ายรวมกันเป็นอนุกรมแรงดันไฟฟ้าสุทธิของพวกเขาจะเพิ่มขึ้นเพื่อสร้างผลลัพธ์รวมที่ใหญ่กว่า
สิ่งเดียวกันนี้เกิดขึ้นในตัวแปลงเพิ่มในระหว่างโหมดการปลดปล่อยตัวเหนี่ยวนำทำให้เกิดเอาต์พุตซึ่งอาจเป็นผลรวมของแรงดันไฟฟ้า EMF กลับตัวเหนี่ยวนำและแรงดันไฟฟ้าที่มีอยู่ดังแสดงในแผนภาพด้านบน
แรงดันไฟฟ้ารวมนี้ส่งผลให้เอาต์พุตที่เพิ่มขึ้นหรือเอาต์พุตแบบก้าวขึ้นซึ่งจะค้นหาเส้นทางผ่านไดโอด D และตัวเก็บประจุข้าม C เพื่อไปถึงโหลดที่เชื่อมต่อในที่สุด
ตัวเก็บประจุ C มีบทบาทสำคัญมากที่นี่ในระหว่างโหมดการปลดปล่อยตัวเหนี่ยวนำตัวเก็บประจุ C จะเก็บพลังงานรวมที่ปล่อยออกมาและในช่วงถัดไปเมื่อทรานซิสเตอร์ปิดสวิตช์อีกครั้งและตัวเหนี่ยวนำอยู่ในโหมดการจัดเก็บตัวเก็บประจุ C จะพยายาม เพื่อรักษาสมดุลโดยการจ่ายพลังงานที่เก็บไว้เองให้กับโหลด ดูรูปด้านล่าง

สิ่งนี้ช่วยให้มั่นใจได้ถึงแรงดันไฟฟ้าที่ค่อนข้างคงที่สำหรับโหลดที่เชื่อมต่อซึ่งสามารถรับพลังงานได้ทั้งในช่วงเปิดและปิดของทรานซิสเตอร์
หากไม่รวม C คุณลักษณะนี้จะถูกยกเลิกส่งผลให้โหลดลดลงและอัตราประสิทธิภาพต่ำลง
กระบวนการอธิบายข้างต้นยังคงดำเนินต่อไปเมื่อทรานซิสเตอร์ถูกเปิด / ปิดที่ความถี่ที่กำหนดซึ่งจะคงไว้ซึ่งผลของการเพิ่มการแปลง
โหมดการทำงาน
ตัวแปลงบูสต์อาจทำงานเป็นหลักในสองโหมดคือโหมดต่อเนื่องและโหมดไม่ต่อเนื่องในโหมดต่อเนื่องกระแสตัวเหนี่ยวนำจะไม่ได้รับอนุญาตให้ถึงศูนย์ในระหว่างกระบวนการคายประจุ (ในขณะที่ทรานซิสเตอร์ปิดอยู่)
สิ่งนี้จะเกิดขึ้นเมื่อเวลาเปิด / ปิดของทรานซิสเตอร์มีขนาดในลักษณะที่ตัวเหนี่ยวนำเชื่อมต่อกลับอย่างรวดเร็วด้วยแหล่งจ่ายอินพุตผ่านทรานซิสเตอร์ที่เปิดอยู่ก่อนที่จะสามารถระบายออกได้อย่างสมบูรณ์ทั้งโหลดและตัวเก็บประจุ C
สิ่งนี้ช่วยให้ตัวเหนี่ยวนำสร้างแรงดันไฟฟ้าเพิ่มอย่างสม่ำเสมอในอัตราที่มีประสิทธิภาพ
ในโหมดไม่ต่อเนื่องเวลาเปิดสวิตช์ของทรานซิสเตอร์อาจห่างกันมากจนตัวเหนี่ยวนำอาจได้รับอนุญาตให้คายประจุจนสุดและไม่ทำงานระหว่างช่วงเวลาเปิดสวิตช์ของทรานซิสเตอร์ทำให้เกิดแรงดันกระเพื่อมขนาดใหญ่ทั่วทั้งโหลดและตัวเก็บประจุ C
สิ่งนี้อาจทำให้ผลผลิตมีประสิทธิภาพน้อยลงและมีความผันผวนมากขึ้น
แนวทางที่ดีที่สุดคือการคำนวณเวลาเปิด / ปิดของทรานซิสเตอร์ซึ่งให้แรงดันไฟฟ้าคงที่สูงสุดตลอดทั้งเอาต์พุตซึ่งหมายความว่าเราต้องตรวจสอบให้แน่ใจว่าตัวเหนี่ยวนำได้รับการเปลี่ยนอย่างเหมาะสมที่สุดเพื่อที่จะไม่เปิดเร็วเกินไปซึ่งอาจไม่อนุญาตให้คายประจุ ในทางที่ดีที่สุดและไม่เปิดเครื่องช้ามากซึ่งอาจทำให้จุดที่ไม่มีประสิทธิภาพหมดไป
การคำนวณการเหนี่ยวนำกระแสแรงดันและรอบการทำงานใน Boost Converter
ในที่นี้เราจะพูดถึงเฉพาะโหมดต่อเนื่องซึ่งเป็นวิธีที่ดีกว่าในการใช้งานตัวแปลงบูสต์ลองประเมินการคำนวณที่เกี่ยวข้องกับตัวแปลงบูสต์ในโหมดต่อเนื่อง:ในขณะที่ทรานซิสเตอร์อยู่ในเฟสสวิตช์ ON แรงดันไฟฟ้าของแหล่งอินพุต (
 ) ถูกนำไปใช้กับตัวเหนี่ยวนำทำให้เกิดกระแส (
) ถูกนำไปใช้กับตัวเหนี่ยวนำทำให้เกิดกระแส (  ) สร้างขึ้นผ่านตัวเหนี่ยวนำในช่วงเวลาหนึ่งซึ่งแสดงโดย (t) สิ่งนี้อาจแสดงด้วยสูตรต่อไปนี้:
) สร้างขึ้นผ่านตัวเหนี่ยวนำในช่วงเวลาหนึ่งซึ่งแสดงโดย (t) สิ่งนี้อาจแสดงด้วยสูตรต่อไปนี้: ΔIL / Δt = Vt / L
เมื่อถึงเวลาที่สถานะ ON ของทรานซิสเตอร์กำลังจะจบลงและทรานซิสเตอร์กำลังจะปิดเครื่องกระแสไฟฟ้าที่ควรจะสร้างขึ้นในตัวเหนี่ยวนำอาจได้รับจากสูตรต่อไปนี้:
ΔIL (บน) = 1 / L 0ʃDT
หรือ
ความกว้าง = DT (Vi) / L
โดยที่ D คือรอบการทำงาน เพื่อความเข้าใจคำจำกัดความคุณสามารถอ้างถึง b โพสต์ที่เกี่ยวข้องกับตัวแปลง uck
L หมายถึงค่าความเหนี่ยวนำของตัวเหนี่ยวนำใน Henry
ตอนนี้ในขณะที่ทรานซิสเตอร์อยู่ในสถานะ OFF และถ้าเราสมมติว่าไดโอดให้แรงดันไฟฟ้าต่ำสุดตกคร่อมและตัวเก็บประจุ C มีขนาดใหญ่พอที่จะสามารถผลิตแรงดันไฟฟ้าขาออกได้เกือบคงที่ดังนั้นกระแสเอาต์พุต (
) สามารถอนุมานได้ด้วยความช่วยเหลือของนิพจน์ต่อไปนี้ Vi - Vo = LdI / dt
นอกจากนี้รูปแบบปัจจุบัน (
) ที่อาจเกิดขึ้นระหว่างตัวเหนี่ยวนำในช่วงระยะเวลาการปลดปล่อย (สถานะปิดทรานซิสเตอร์) สามารถระบุได้ดังนี้: ΔIL (ปิด) = 1 / L x DTʃT (Vi - Vo) dt / L = (Vi - Vo) (1 - D) T / L
สมมติว่าตัวแปลงสามารถทำงานได้ในสภาวะที่ค่อนข้างคงที่ขนาดของกระแสหรือพลังงานที่เก็บอยู่ภายในตัวเหนี่ยวนำตลอดวงจรการเปลี่ยน (การสลับ) สามารถสันนิษฐานได้ว่าคงที่หรือในอัตราที่เท่ากันซึ่งอาจแสดงเป็น:
E = ½ L x 2IL
ข้างต้นยังบอกเป็นนัยว่าเนื่องจากกระแสตลอดช่วงการเปลี่ยนหรือที่จุดเริ่มต้นของสถานะเปิดและเมื่อสิ้นสุดสถานะปิดควรจะเหมือนกันค่าผลลัพธ์ของการเปลี่ยนแปลงในระดับปัจจุบันควรเป็นศูนย์เนื่องจาก แสดงไว้ด้านล่าง:
ΔIL (เปิด) + ΔIL (ปิด) = 0
หากเราแทนที่ค่าของΔIL (on) และΔIL (off) ในสูตรข้างต้นจากอนุพันธ์ก่อนหน้านี้เราจะได้รับ:
IL (เปิด) - ΔIL (ปิด) = Vidt / L + (Vi - Vo) (1 - D) T / L = 0
การทำให้ง่ายขึ้นจะให้ผลลัพธ์ต่อไปนี้: Vo / Vi = 1 / (1 - D)
หรือ
Vo = Vi / (1 - D)
นิพจน์ข้างต้นระบุอย่างชัดเจนว่าแรงดันไฟฟ้าขาออกในตัวแปลงบูสต์จะสูงกว่าแรงดันไฟฟ้าขาเข้าเสมอ (ตลอดช่วงทั้งหมดของรอบการทำงาน 0 ถึง 1)
การสลับคำข้ามด้านข้างในสมการด้านบนเราได้สมการสำหรับกำหนดวัฏจักรหน้าที่ในวงจรการทำงานของตัวแปลงบูสต์
D = 1 - Vo / Vi
การประเมินข้างต้นทำให้เรามีสูตรต่างๆในการกำหนดพารามิเตอร์ต่างๆที่เกี่ยวข้องกับการดำเนินการตัวแปลงบูสต์ซึ่งสามารถนำไปใช้อย่างมีประสิทธิภาพในการคำนวณและปรับแต่งการออกแบบตัวแปลงบูสต์ที่แม่นยำ
คำนวณ Boost Converter Power Stage
4 แนวทางต่อไปนี้จำเป็นสำหรับการคำนวณ Boost Converter Power Stage:
1. ช่วงแรงดันไฟฟ้าอินพุต: Vin (นาที) และ Vin (สูงสุด)
2. แรงดันขาออกน้อยที่สุด: Vout
3. กระแสไฟขาออกสูงสุด: Iout (สูงสุด)
4. IC Circuit ใช้ในการสร้าง Boost converter
สิ่งนี้มักเป็นข้อบังคับเพียงเพราะควรใช้โครงร่างบางอย่างสำหรับการคำนวณซึ่งอาจไม่ได้กล่าวถึงในแผ่นข้อมูล
ในกรณีที่ข้อ จำกัด เหล่านี้คุ้นเคยกับการประมาณขั้นตอนการใช้พลังงานตามปกติ
เกิดขึ้น
การประเมินกระแสสวิตชิ่งสูงสุด
ขั้นตอนหลักในการกำหนดกระแสไฟฟ้าสลับคือการหารอบการทำงาน D สำหรับแรงดันไฟฟ้าอินพุตขั้นต่ำ แรงดันไฟฟ้าอินพุตขั้นต่ำเปล่าถูกใช้เป็นหลักเนื่องจากส่งผลให้กระแสสวิตช์สูงสุด
D = 1 - {Vin (min) x n} / Vout ---------- (1)
Vin (นาที) = แรงดันไฟฟ้าอินพุตขั้นต่ำ
Vout = แรงดันขาออกที่ต้องการ
n = ประสิทธิภาพของตัวแปลงเช่น มูลค่าที่คาดการณ์ไว้อาจเป็น 80%
ประสิทธิภาพจะรวมอยู่ในการคำนวณรอบการทำงานเพียงเพราะต้องใช้ตัวแปลงเพื่อแสดงการกระจายพลังงานด้วย การประมาณนี้นำเสนอรอบการทำงานที่เหมาะสมกว่าเมื่อเทียบกับสูตรที่ไม่มีปัจจัยด้านประสิทธิภาพ
เราจำเป็นต้องยอมให้มีความอดทนประมาณ 80% (ซึ่งอาจไม่สามารถทำได้สำหรับการเพิ่ม
ประสิทธิภาพของตัวแปลงที่แย่ที่สุด) ควรพิจารณาหรืออาจอ้างถึงส่วนคุณสมบัติทั่วไปของเอกสารข้อมูลของตัวแปลงที่เลือก
การคำนวณระลอกปัจจุบัน
การดำเนินการที่ตามมาสำหรับการคำนวณกระแสสวิตชิ่งสูงสุดคือการหาค่ากระแสกระเพื่อมของตัวเหนี่ยวนำ
ในแผ่นข้อมูลตัวแปลงมักจะมีการอ้างถึงตัวเหนี่ยวนำเฉพาะหรือตัวเหนี่ยวนำหลายชนิดเพื่อทำงานร่วมกับ IC ดังนั้นเราต้องใช้ค่าตัวเหนี่ยวนำที่แนะนำเพื่อคำนวณกระแสกระเพื่อมหากไม่มีสิ่งใดปรากฏในแผ่นข้อมูลค่าที่ประมาณในรายการตัวเหนี่ยวนำ
ส การเลือกบันทึกแอปพลิเคชันนี้เพื่อคำนวณ Boost Converter Power Stage
เดลต้า I (l) = {Vin (นาที) x D} / f (s) x L ---------- (2)
Vin (นาที) = แรงดันไฟฟ้าขาเข้าที่เล็กที่สุด
D = รอบการทำงานที่วัดได้ในสมการ 1
f (s) = ความถี่ในการเปลี่ยนที่เล็กที่สุดของตัวแปลง
L = ค่าตัวเหนี่ยวนำที่ต้องการ
จากนั้นจะต้องมีการจัดตั้งขึ้นหาก IC ที่ต้องการอาจสามารถจ่ายเอาต์พุตที่เหมาะสมได้
ปัจจุบัน.
Iout (สูงสุด) = [I lim (min) - Delta I (l) / 2] x (1 - D) ---------- (3)
I lim (min) = ค่าต่ำสุดของ
ข้อ จำกัด ปัจจุบันของสวิตช์ที่เกี่ยวข้อง (เน้นในข้อมูล
แผ่น)
Delta I (l) = กระแสกระเพื่อมของตัวเหนี่ยวนำที่วัดได้ในสมการก่อนหน้านี้
D = รอบหน้าที่คำนวณในสมการแรก
ในกรณีที่ค่าโดยประมาณสำหรับกระแสเอาต์พุตที่เหมาะสมที่สุดของ IC ที่กำหนดไว้คือ Iout (สูงสุด) ต่ำกว่าที่ระบบคาดว่าจะมีกระแสเอาต์พุตที่ยิ่งใหญ่ที่สุดจำเป็นต้องใช้ IC ทางเลือกที่มีการควบคุมกระแสสวิตช์ที่สูงกว่าเล็กน้อย
โดยมีเงื่อนไขว่าค่าที่วัดได้สำหรับ Iout (สูงสุด) น่าจะเป็นเฉดสีที่น้อยกว่าค่าที่คาดไว้คุณสามารถใช้ IC ที่คัดเลือกมาพร้อมกับตัวเหนี่ยวนำที่มีค่าความเหนี่ยวนำมากขึ้นเมื่อใดก็ตามที่ยังอยู่ในอนุกรมที่กำหนด การเหนี่ยวนำที่มากขึ้นจะช่วยลดกระแสกระเพื่อมดังนั้นจึงช่วยเพิ่มกระแสเอาต์พุตสูงสุดด้วย IC เฉพาะ
หากค่าที่กำหนดไว้สูงกว่ากระแสเอาต์พุตที่ดีที่สุดของโปรแกรมจะพบกระแสสวิตช์ที่ยิ่งใหญ่ที่สุดในอุปกรณ์:
Isw (สูงสุด) = Delta I (L) / 2 + Iout (สูงสุด) / (1 - D) --------- (4)
Delta I (L) = กระแสกระเพื่อมของตัวเหนี่ยวนำที่วัดได้ในสมการที่สอง
Iout (สูงสุด) = กระแสเอาต์พุตที่เหมาะสมที่จำเป็นในยูทิลิตี้
D = รอบการทำงานที่วัดได้ก่อนหน้านี้
จริงๆแล้วมันเป็นกระแสที่เหมาะสมที่สุดตัวเหนี่ยวนำสวิตช์ที่ปิดอยู่นอกเหนือจากไดโอดภายนอกเป็นสิ่งจำเป็นเพื่อให้สามารถยืนหยัดต่อสู้ได้
การเลือกตัวเหนี่ยวนำ
บางครั้งแผ่นข้อมูลให้ค่าตัวเหนี่ยวนำที่แนะนำมากมาย หากเป็นสถานการณ์นี้คุณจะต้องเลือกตัวเหนี่ยวนำที่มีช่วงนี้ ยิ่งค่าตัวเหนี่ยวนำมากขึ้นค่าที่เพิ่มขึ้นคือกระแสไฟขาออกสูงสุดส่วนใหญ่เป็นเพราะกระแสกระเพื่อมที่ลดลง
การตัดค่าตัวเหนี่ยวนำการลดขนาดลงคือขนาดโซลูชัน โปรดทราบว่าตัวเหนี่ยวนำควรมีการจัดอันดับปัจจุบันที่ดีกว่าอย่างสม่ำเสมอเมื่อเทียบกับกระแสสูงสุดที่ระบุในสมการ 4 เนื่องจากความจริงที่ว่ากระแสไฟฟ้าเร็วขึ้นพร้อมกับการลดความเหนี่ยวนำ
สำหรับองค์ประกอบที่ไม่มีช่วงตัวเหนี่ยวนำ ls ส่งมอบภาพต่อไปนี้เป็นการคำนวณที่เชื่อถือได้สำหรับตัวเหนี่ยวนำที่เหมาะสม
L = Vin x (Vout - Vin) / เดลต้า I (L) x f (s) x Vout --------- (5)
Vin = แรงดันไฟฟ้าอินพุตมาตรฐาน
Vout = แรงดันขาออกที่ต้องการ
f (s) = ความถี่ในการเปลี่ยนน้อยที่สุดของตัวแปลง
Delta I (L) = กระแสกระเพื่อมของตัวเหนี่ยวนำที่คาดการณ์ไว้ให้สังเกตด้านล่าง:
กระแสกระเพื่อมของตัวเหนี่ยวนำไม่สามารถวัดได้ด้วยสมการแรกเพียงเพราะไม่รู้จักตัวเหนี่ยวนำ ls การประมาณเสียงสำหรับกระแสไฟกระเพื่อมของตัวเหนี่ยวนำ ls 20% ถึง 40% ของกระแสเอาต์พุต
Delta I (L) = (0.2 ถึง 0.4) x Iout (สูงสุด) x Vout / Vin ---------- (6)
Delta I (L) = กระแสกระเพื่อมของตัวเหนี่ยวนำที่คาดการณ์ไว้
Iout (สูงสุด) = เอาต์พุตที่เหมาะสม
ปัจจุบันที่จำเป็นสำหรับแอปพลิเคชัน
การกำหนดไดโอด Rectifier
เพื่อลดการสูญเสียไดโอด Schottky จำเป็นต้องได้รับการพิจารณาว่าเป็นทางเลือกที่ดีจริงๆ
การจัดอันดับกระแสไปข้างหน้าที่ถือว่าจำเป็นนั้นเทียบเท่ากับกระแสไฟขาออกสูงสุด:
I (f) = Iout (สูงสุด) ---------- (7)
I (f) = ปกติ
กระแสไปข้างหน้าของไดโอดเรียงกระแส
Iout (สูงสุด) = กระแสเอาต์พุตที่เหมาะสมมีความสำคัญในโปรแกรม
ไดโอด Schottky มีคะแนนกระแสสูงสุดมากกว่าเมื่อเทียบกับคะแนนปกติ นั่นคือเหตุผลที่กระแสสูงสุดที่เพิ่มขึ้นในรายการไม่ใช่เรื่องใหญ่ที่น่ากังวล
พารามิเตอร์ที่สองที่มีการตรวจสอบคือการกระจายพลังงานของไดโอด ประกอบด้วยการจัดการ:
P (d) = ฉัน (f) x V (f) ---------- (8)
I (f) = กระแสไปข้างหน้าเฉลี่ยของไดโอดเรียงกระแส
V (f) = แรงดันไปข้างหน้าของไดโอดเรียงกระแส
การตั้งค่าแรงดันขาออก
ตัวแปลงส่วนใหญ่จะจัดสรรแรงดันไฟฟ้าขาออกด้วยเครือข่ายตัวต้านทานตัวต้านทาน (ที่สามารถสร้างขึ้นได้ควรเป็นตัวแปลงแรงดันไฟฟ้าขาออกที่อยู่กับที่)
ด้วยแรงดันไฟฟ้าป้อนกลับที่กำหนด V (fb) และกระแสอคติป้อนกลับ I (fb) ตัวแบ่งแรงดันไฟฟ้ามักจะเป็น
คำนวณ

กระแสที่ได้รับความช่วยเหลือจากตัวแบ่งตัวต้านทานอาจมีมวลมากถึงหนึ่งร้อยเท่าเมื่อเทียบกับอคติย้อนกลับในปัจจุบัน:
I (r1 / 2)> หรือ = 100 x I (fb) ---------- (9)
I (r1 / 2) = กระแสในส่วนของตัวแบ่งตัวต้านทานเป็น GND
I (fb) = ความเอนเอียงของข้อเสนอแนะในปัจจุบันจากแผ่นข้อมูล
สิ่งนี้เพิ่มความไม่ถูกต้องต่ำกว่า 1% ให้กับการประเมินแรงดันไฟฟ้า ปัจจุบันมีขนาดใหญ่กว่ามาก
ปัญหาหลักของค่าตัวต้านทานที่น้อยกว่าคือการสูญเสียพลังงานที่เพิ่มขึ้นในตัวแบ่งตัวต้านทานยกเว้นความเกี่ยวข้องอาจสูงขึ้นบ้าง
ด้วยความเชื่อมั่นข้างต้นตัวต้านทานจะทำงานตามรายการด้านล่าง:
R2 = V (fb) / ฉัน (r1 / 2) ---------- (10)
R1 = R2 x [Vout / V (fb) - 1] ---------- (11)
R1, R2 = ตัวแบ่งตัวต้านทาน
V (fb) = แรงดันป้อนกลับจากแผ่นข้อมูล
I (r1 / 2) = กระแสเนื่องจากตัวแบ่งตัวต้านทานเป็น GND ซึ่งสร้างขึ้นในสมการ 9
Vout = แรงดันเอาต์พุตตามแผน
การเลือกตัวเก็บประจุอินพุต
โดยทั่วไปค่าต่ำสุดสำหรับตัวเก็บประจุอินพุตจะถูกส่งออกไปในแผ่นข้อมูล ค่าที่น้อยที่สุดนี้มีความสำคัญสำหรับแรงดันไฟฟ้าขาเข้าที่คงที่อันเป็นผลมาจากข้อกำหนดเบื้องต้นในปัจจุบันสูงสุดของแหล่งจ่ายไฟแบบสวิตชิ่ง
วิธีที่เหมาะสมที่สุดคือการใช้ตัวเก็บประจุเซรามิกที่มีความต้านทานซีรีส์เทียบเท่า (ESR) ลดลง
องค์ประกอบอิเล็กทริกต้องเป็น X5R หรือสูงกว่า มิฉะนั้นตัวเก็บประจุอาจลดความจุส่วนใหญ่ลงเนื่องจาก DC ไบแอสหรืออุณหภูมิ (ดูข้อมูลอ้างอิง 7 และ 8)
ในความเป็นจริงค่านี้อาจเพิ่มขึ้นได้หากแรงดันไฟฟ้าขาเข้าอาจมีเสียงดัง
การเลือกตัวเก็บประจุเอาท์พุท
วิธีที่ดีที่สุดคือค้นหาตัวเก็บประจุ ESR ขนาดเล็กเพื่อลดแรงกระเพื่อมของแรงดันไฟฟ้าขาออก ตัวเก็บประจุแบบเซรามิกเป็นประเภทที่เหมาะสมเมื่อองค์ประกอบอิเล็กทริกเป็นประเภท X5R หรือมีประสิทธิภาพมากกว่าในกรณีที่ตัวแปลงมีค่าตอบแทนภายนอกสามารถใช้ค่าตัวเก็บประจุชนิดใดก็ได้ที่อยู่เหนือค่าที่เล็กที่สุดที่ได้รับการสนับสนุนในแผ่นข้อมูล แต่อย่างไรก็ตามการชดเชยจะต้องมีการเปลี่ยนแปลงสำหรับความจุเอาต์พุตที่เลือก
ด้วยตัวแปลงที่ได้รับการชดเชยภายในจำเป็นต้องใช้ค่าตัวเหนี่ยวนำและตัวเก็บประจุที่แนะนำหรือข้อมูลในแผ่นข้อมูลสำหรับการปรับตัวเก็บประจุเอาท์พุทสามารถนำมาใช้กับอัตราส่วน L x C
ด้วยการชดเชยทุติยภูมิสมการต่อไปนี้สามารถช่วยในการควบคุมค่าตัวเก็บประจุเอาท์พุทสำหรับระลอกแรงดันไฟฟ้าขาออกที่วางแผนไว้:
Cout (นาที) = Iout (สูงสุด) x D / f (s) x Delta Vout ---------- (12)
Cout (นาที) = ความจุเอาต์พุตที่เล็กที่สุด
Iout (สูงสุด) = กระแสเอาต์พุตที่เหมาะสมของการใช้งาน
D = duty cycle ทำงานร่วมกับ Equation 1
f (s) = ความถี่ในการเปลี่ยนที่เล็กที่สุดของตัวแปลง
Delta Vout = แรงดันไฟฟ้าขาออกในอุดมคติ
ESR ของตัวเก็บประจุเอาท์พุทจะเพิ่มระลอกคลื่นมากขึ้นโดยกำหนดไว้ล่วงหน้าด้วยสมการ:
Delta Vout (ESR) = ESR x [Iout (สูงสุด) / 1 -D + Delta I (l) / 2] ---------- (13)
Delta Vout (ESR) = แรงดันไฟฟ้าขาออกทางเลือกที่เป็นผลมาจากตัวเก็บประจุ ESR
ESR = ความต้านทานอนุกรมเทียบเท่าของตัวเก็บประจุเอาท์พุทที่ใช้
Iout (สูงสุด) = กระแสเอาต์พุตสูงสุดของการใช้ประโยชน์
D = รอบการทำงานที่คำนวณได้ในสมการแรก
Delta I (l) = กระแสกระเพื่อมของตัวเหนี่ยวนำจากสมการ 2 หรือสมการ 6
สมการในการประเมิน Power Stage ของ Boost Converter
รอบการทำงานสูงสุด: D = 1 - ไวน์ (ขั้นต่ำ) x n / Vout ---------- (14)
Vin (นาที) = แรงดันไฟฟ้าขาเข้าที่เล็กที่สุด
Vout = แรงดันขาออกที่คาดไว้
n = ประสิทธิภาพของตัวแปลงเช่น ประมาณ 85%
กระแสระลอกของตัวเหนี่ยวนำ:
เดลต้า I (l) = Vin (ต่ำสุด) x D / f (s) x L ---------- (15)
Vin (นาที) = แรงดันไฟฟ้าขาเข้าที่เล็กที่สุด
D = รอบการทำงานที่กำหนดในสมการ 14
f (s) = ความถี่การเปลี่ยนเล็กน้อยของตัวแปลง
L = ค่าตัวเหนี่ยวนำที่ระบุ
กระแสไฟขาออกสูงสุดของ IC ที่เสนอชื่อ:
Iout (สูงสุด) = [Ilim (นาที) - Delta I (l)] x (1 - D) ---------- (16)Ilim (นาที) = ค่าที่น้อยที่สุดของขีด จำกัด ปัจจุบันของแม่มดอินทิกรัล (เสนอในแผ่นข้อมูล)
Delta I (l) = กระแสกระเพื่อมของตัวเหนี่ยวนำที่สร้างขึ้นในสมการ 15
D = รอบการทำงานที่ประมาณในสมการ 14
กระแสสวิตช์สูงสุดเฉพาะแอปพลิเคชัน:
Isw (สูงสุด) = Delta I (l) / 2 + Iout (สูงสุด) / (1 - D) ---------- (17)Delta I (l) = กระแสกระเพื่อมของตัวเหนี่ยวนำโดยประมาณในสมการ 15
Iout (สูงสุด) = กระแสเอาต์พุตสูงสุดที่จำเป็นในยูทิลิตี้
D = รอบการทำงานที่คำนวณได้ในสมการ 14
การประมาณตัวเหนี่ยวนำ:
L = Vin x (Vout - Vin) / Delta I (l) x f (s) x Vout ---------- (18)Vin = แรงดันไฟฟ้าขาเข้าทั่วไป
Vout = แรงดันเอาต์พุตตามแผน
f (s) = ความถี่ในการเปลี่ยนที่เล็กที่สุดของตัวแปลง
Delta I (l) = กระแสกระเพื่อมของตัวเหนี่ยวนำที่คาดการณ์ไว้ดูสมการ 19
Inductor Ripple การประเมินค่าปัจจุบัน:
Delta I (l) = (0.2 ถึง 0.4) x Iout (สูงสุด) x Vout / Vin ---------- (19)Delta I (l) = กระแสกระเพื่อมของตัวเหนี่ยวนำที่คาดการณ์ไว้
Iout (สูงสุด) = กระแสเอาต์พุตสูงสุดที่สำคัญในการใช้งาน
กระแสไปข้างหน้าโดยทั่วไปของไดโอด Rectifier:
I (f) = Iout (สูงสุด) ---------- (20)
Iout (สูงสุด) = กระแสเอาต์พุตที่ดีที่สุดที่เหมาะสมในยูทิลิตี้
การสูญเสียพลังงานในไดโอด Rectifier:
P (d) = ฉัน (ฉ)
x V (ฉ) ---------- (21)
I (f) = กระแสไปข้างหน้าโดยทั่วไปของไดโอดเรียงกระแส
V (f) = แรงดันไปข้างหน้าของไดโอดเรียงกระแส
ปัจจุบันโดยใช้ Resistive Divider Network สำหรับการระบุตำแหน่งแรงดันขาออก:
I (r1 / 2)> หรือ = 100 x I (fb) ---------- (22)I (fb) = ความเอนเอียงของข้อเสนอแนะในปัจจุบันจากแผ่นข้อมูล
ค่าตัวต้านทานระหว่าง FB Pin และ GND:
R2 = V (fb) / ฉัน (r1 / 2) ---------- (23)
ค่าตัวต้านทานระหว่างขา FB และ Vout:
R1 = R2 x [Vout / V (fb) - 1] ---------- (24)
V (fb) = แรงดันป้อนกลับจากแผ่นข้อมูล
I (r1 / 2) = ปัจจุบัน
เนื่องจากตัวแบ่งตัวต้านทานเป็น GND คิดได้ในสมการ 22
Vout = ขอหลังจากแรงดันไฟฟ้าขาออก
ความจุเอาต์พุตที่เล็กที่สุดหรือกำหนดไว้ล่วงหน้าในแผ่นข้อมูล:
Cout (นาที) = Iout (สูงสุด) x D / f (s) x Delta I (l) ---------- (25)
Iout (สูงสุด) = กระแสเอาต์พุตสูงสุดที่เป็นไปได้ของโปรแกรม
D = รอบการทำงานที่คำนวณได้ในสมการ 14
f (s) = ความถี่ในการเปลี่ยนที่เล็กที่สุดของตัวแปลง
Delta Vout = แรงดันไฟฟ้าขาออกที่คาดไว้
Ripple แรงดันไฟฟ้าขาออกส่วนเกินเนื่องจาก ESR:
Delta Vout (esr) = ESR x [Iout (สูงสุด) / (1 - D) + Delta I (l) / 2 ---------- (26)
ESR = ความต้านทานอนุกรมขนานของตัวเก็บประจุเอาท์พุทที่ใช้
Iout (สูงสุด) = กระแสเอาต์พุตที่เหมาะสมของการใช้งาน
D = รอบหน้าที่กำหนดในสมการ 14
Delta I (l) = กระแสกระเพื่อมของตัวเหนี่ยวนำจากสมการ 15 หรือสมการ 19
คู่ของ: สร้างวงจรสกู๊ตเตอร์ไฟฟ้า / รถลากนี้ ถัดไป: การคำนวณตัวเหนี่ยวนำในตัวแปลง Buck Boost