ในโพสต์นี้เราเรียนรู้วงจรจับเวลาถอยหลังสำหรับการทำงานของกลไกมอเตอร์ตู้อบพร้อมชุดการเคลื่อนไหวที่ต้องการ นายอันวาร์ขอแนวคิดดังกล่าว
ข้อกำหนดทางเทคนิค
ฉันมาจากอินโดนีเซีย ..... ฉันต้องการแผนผังสำหรับตัวตั้งเวลาบ่มเพาะที่มีมอเตอร์แรงบิดสูง (มอเตอร์ไฟฟ้ากระแสตรงในรถยนต์) ฉันกำลังพยายามให้มอเตอร์กระแสตรงทำงานในสองทิศทางจนกว่าจะถึงตำแหน่งสิ้นสุดจากนั้นหยุดและเปลี่ยนขั้วเพื่อให้มันวิ่งไปทางอื่นเมื่อมีการใช้พลังงานอีกครั้ง จากนั้นทำแบบเดียวกันที่ปลายอีกด้าน
1. ตัวจับเวลาเปิดเครื่องเป็นเวลา 1 นาที (07.00 น. -7: 01 น.)
2. มอเตอร์วิ่งไปในทิศทางเดียวจนกว่าจะถึงตำแหน่งหยุดพูด 30 วินาที
3. พลังงานไปยังมอเตอร์จะดับลงเมื่อถึงตำแหน่งหยุดและความล่าช้าเป็นเวลา 1 นาที จับเวลาเพื่อสิ้นสุด / ปิดพลังงานหลัก กลับขั้วด้วยเช่นกัน
4. ในครั้งต่อไปที่ตัวจับเวลาหลักเปิดขึ้น (10: 00-10: 01) จะใช้เวลาเดียวกันในทิศทางย้อนกลับและทำซ้ำอย่างต่อเนื่อง
5. มอเตอร์ถอยหลัง 12 VDC (เพียงสองสายจากมอเตอร์ + และ -)
6. ต้องการไฟ LED สำหรับมอเตอร์ Rev / Fwd
คุณช่วยฉันได้ไหม
ขอขอบคุณล่วงหน้าสำหรับความช่วยเหลือใด ๆ
นี่เป็นโครงการบ้านที่สำคัญที่ต้องเชื่อถือได้ 100%
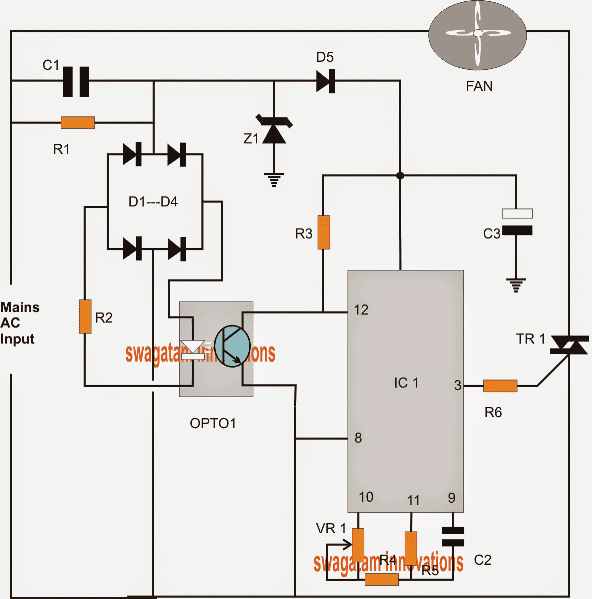
การออกแบบ

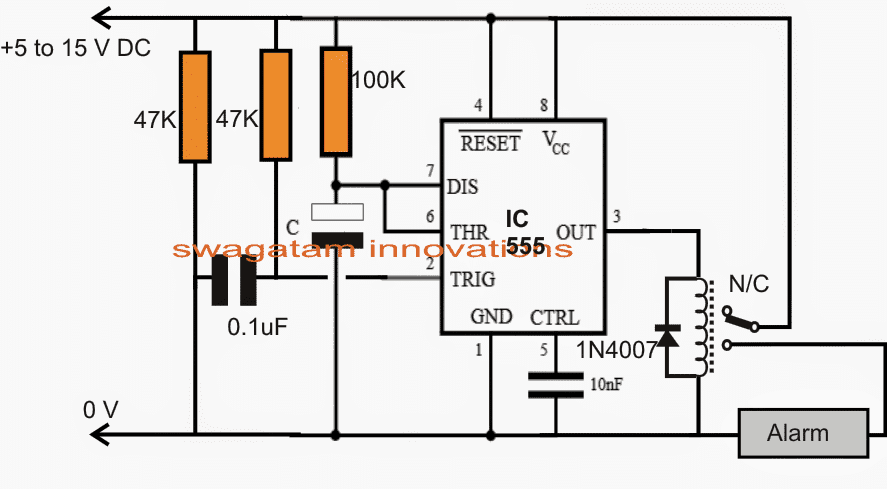
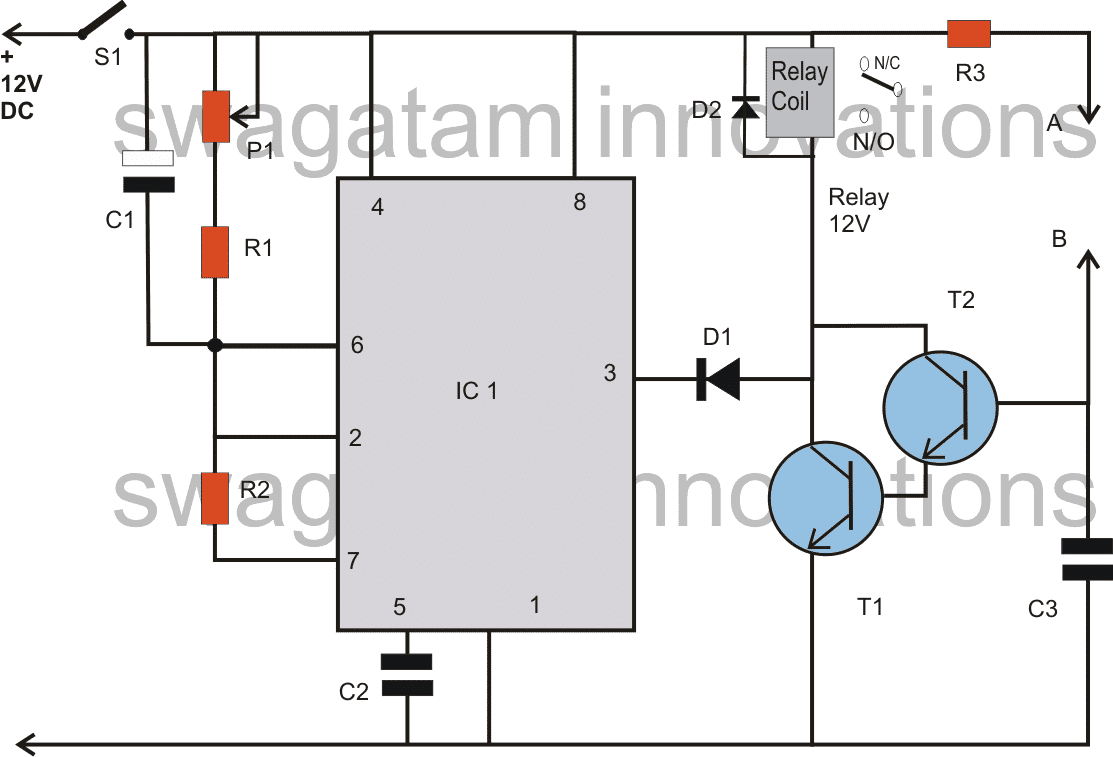
ในรูปด้านบนเราสามารถเห็นภาพการออกแบบสำหรับการใช้การเคลื่อนที่ไปข้างหน้าแบบย้อนกลับที่เสนอของมอเตอร์บ่มเพาะหลังจากช่วงเวลาที่กำหนดไว้ล่วงหน้า
ในทันทีที่เปิดเครื่องเรามีสถานการณ์ต่อไปนี้:
สวิตช์แม่เหล็กสำหรับ 'set' อาจถือว่าอยู่ในสถานะปิดการใช้งานหรือถูกกดทับในขณะที่มอเตอร์หรือกลไกตู้อบที่ออกแบบไว้อยู่ในตำแหน่งเริ่มต้นที่เป็นศูนย์
โปรดทราบว่าควรใช้สวิตช์ 'set' / 'reset' โดยใช้สวิตช์กกแม่เหล็ก
เมื่อเปิดเครื่อง IC 4060 จะถูกรีเซ็ตผ่าน C2 เพื่อให้เริ่มกระบวนการนับจากศูนย์และ pin3 จะแสดงผลลอจิกเป็นศูนย์
ตรรกะศูนย์เริ่มต้นนี้ถูกป้อนผ่าน C3 ไปยังฐานของ T1 ซึ่งดำเนินการบังคับให้ T3 และรีเลย์ที่เกี่ยวข้องเปิดทำงานทันที R7 ในกระบวนการทำให้ T1 / T3 ได้รับการล็อคในโหมดนี้
รีเลย์ DPDT ณ จุดนี้จะทำงานที่หน้าสัมผัส N / O ที่เริ่มต้นมอเตอร์และกลไกไปสู่การเคลื่อนที่แบบ 'ไปข้างหน้า' ที่สมมติขึ้น
ทันทีที่มอเตอร์เริ่มเคลื่อนที่ปุ่ม 'set' จะถูกปล่อยออกมาเพื่อให้ T4 และ SPDT ด้านบนได้รับโอกาสในการกระตุ้นซึ่งรีเลย์ SPDT จะมีการเปลี่ยนตำแหน่ง N / O ซึ่งแสดงหน้าสัมผัส N / C ของ DPDT ด้วยโหมดสแตนด์บาย จัดหา..
มอเตอร์และ / หรือกลไกจะเคลื่อนที่ไปเรื่อย ๆ จนกว่าจะถึงตำแหน่ง 'รีเซ็ต' ซึ่งทำให้ T2 เปิดใช้งานและทำลายสลัก T1 / T4
เมื่อปิด T4 รีเลย์ DPDT จะเปลี่ยนตำแหน่งจาก N / O เป็น N / C และให้การเคลื่อนไหวตรงกันข้าม (ย้อนกลับ) ไปยังกลไกมอเตอร์
กลไกมอเตอร์ของตู้ฟักไข่จะพลิกทิศทางและเริ่มการเคลื่อนที่ย้อนกลับจนกว่าจะถึงจุด 'ตั้งค่า' ซึ่งจะปิดการขับเคลื่อนฐานของ T4 อย่างรวดเร็ว SPDT จะปิดกำลังตัด DPDT และกลไกทั้งหมดหยุดนิ่ง .
ในขณะเดียวกัน IC 4060 ยังคงนับต่อไปจนกว่าจะสร้างลอจิกเป็นศูนย์อีกครั้งหลังจากผ่านตรรกะระดับสูงที่พิน 3 (โดยการปล่อย C3)
วงจรจะเริ่มต้นอีกครั้งและทำซ้ำขั้นตอนตามที่อธิบายไว้ข้างต้น
ก่อนหน้านี้: ไฟ LED กะพริบด้วย Arduino - บทช่วยสอนที่สมบูรณ์ ถัดไป: สำรวจอุปกรณ์ป้องกันไฟกระชากสายเมนกำลังสูงในอุตสาหกรรม