คำแนะนำสั้น ๆ เกี่ยวกับหุ่นยนต์:
หุ่นยนต์คือเครื่องจักรใด ๆ ที่ทำงานโดยอัตโนมัตินั่นคือมันเริ่มต้นด้วยตัวเองตัดสินใจวิธีการทำงานของมันเองและหยุดด้วยตัวมันเอง จริงๆแล้วมันเป็นแบบจำลองของมนุษย์ซึ่งออกแบบมาเพื่อแบ่งเบาภาระของมนุษย์ สามารถควบคุมด้วยลมหรือใช้วิธีไฮดรอลิกหรือใช้วิธีควบคุมอิเล็กทรอนิกส์แบบง่ายๆ หุ่นยนต์อุตสาหกรรมตัวแรกคือ Unimates ที่สร้างโดย George Devol และ Joe Engelberger ในช่วงปลายทศวรรษที่ 50 และต้นปี 60
หุ่นยนต์ใด ๆ ถูกสร้างขึ้นจากกฎหมายพื้นฐาน 3 ข้อที่กำหนดโดย Isaac Asimov ผู้แต่งนิยายวิทยาศาสตร์ชาวรัสเซีย:
- หุ่นยนต์ไม่ควรทำร้ายมนุษย์ไม่ว่าทางตรงหรือทางอ้อม
- หุ่นยนต์ควรปฏิบัติตามคำสั่งของมนุษย์เว้นแต่และจนกว่าจะฝ่าฝืนกฎหมายข้อแรก
- หุ่นยนต์ควรปกป้องการดำรงอยู่ของตัวเองหากไม่ละเมิดกฎหมาย 2 ข้อแรก

หุ่นยนต์คงที่
หุ่นยนต์สามารถเป็นหุ่นยนต์ประจำตัวหรือหุ่นยนต์เคลื่อนที่ได้ Mobile Robots เป็นหุ่นยนต์ที่มีฐานเคลื่อนที่ซึ่งทำให้หุ่นยนต์เคลื่อนที่ได้อย่างอิสระในสิ่งแวดล้อม หนึ่งในหุ่นยนต์เคลื่อนที่ขั้นสูงคือ Line Follower Robot โดยพื้นฐานแล้วมันเป็นหุ่นยนต์ที่เดินตามเส้นทางหรือวิถีเฉพาะและตัดสินใจแนวทางการดำเนินการของตัวเองซึ่งโต้ตอบกับอุปสรรค เส้นทางอาจเป็นเส้นสีดำบนพื้นสีขาว (มองเห็นได้) หรือสนามแม่เหล็ก (มองไม่เห็น) การใช้งานเริ่มตั้งแต่การใช้งานในประเทศขั้นพื้นฐานไปจนถึงการใช้ในอุตสาหกรรมเป็นต้นสภาพปัจจุบันในอุตสาหกรรมคือพวกเขากำลังขนย้ายพัสดุหรือวัสดุไปยังอีกที่หนึ่งโดยใช้ระบบเครน บางครั้งการยกของที่มีน้ำหนักมากในเวลานั้นอาจทำให้วัสดุที่ใช้ยกแตกหักและจะทำให้เกิดความเสียหายต่อพัสดุด้วย หุ่นยนต์สายต่อไปนี้มักใช้ในการอุ้มเด็กผ่านห้างสรรพสินค้าบ้านสถานบันเทิงอุตสาหกรรมต่างๆ การใช้บรรทัดต่อไปนี้ ยานยนต์ คือการขนส่งวัสดุจากที่หนึ่งไปยังอีกที่หนึ่งในอุตสาหกรรม การเคลื่อนไหวของหุ่นยนต์นี้ขึ้นอยู่กับการติดตามอย่างสมบูรณ์ หุ่นยนต์สามารถทำทุกอย่างที่คุณกำหนดให้ทำ เช่นเดียวกับในโรงงานสิ่งที่พวกเขาต้องทำในการผลิตผลิตภัณฑ์ก็คือการสร้างหุ่นยนต์

หุ่นยนต์เคลื่อนที่
หุ่นยนต์สาวกไลน์
หุ่นยนต์ผู้ติดตามสายเป็นหุ่นยนต์ที่เดินตามเส้นทางที่กำหนดโดยกลไกป้อนกลับ
การสร้างหุ่นยนต์ผู้ติดตามขั้นพื้นฐาน:
การสร้าง Line Follower Robot ขั้นพื้นฐานมีขั้นตอนต่อไปนี้
- การออกแบบชิ้นส่วนเครื่องจักรกลหรือร่างกายของหุ่นยนต์
- การกำหนดจลนศาสตร์ของหุ่นยนต์
- การออกแบบการควบคุมของหุ่นยนต์

หุ่นยนต์ผู้ติดตามสาย
ชิ้นส่วนเชิงกลหรือร่างกายของหุ่นยนต์สามารถออกแบบได้โดยใช้ AutoCAD หรือ Workspace หุ่นยนต์ผู้ติดตาม Line ขั้นพื้นฐานสามารถประกอบด้วยฐานที่ปลายทั้งสองด้านซึ่งติดตั้งล้อ สามารถใช้แผ่นพลาสติกแข็งรูปสี่เหลี่ยมผืนผ้าเป็นฐานได้ นอกจากนี้ยังสามารถเพิ่มร่างกายที่แข็งเช่นกระบอกสูบพร้อมกับร่างกายที่มีรูปร่างอื่น ๆ ที่เชื่อมต่อกันด้วยข้อต่อและแต่ละชิ้นมีการเคลื่อนที่ที่กำหนดไว้ในทิศทางที่เฉพาะเจาะจง หุ่นยนต์ผู้ติดตาม Line สามารถเป็นหุ่นยนต์เคลื่อนที่แบบล้อเลื่อนที่มีฐานคงที่ซึ่งเป็นหุ่นยนต์เคลื่อนที่แบบขาที่มีร่างกายแข็งหลายตัวเชื่อมต่อกันด้วยข้อต่อ
ขั้นตอนต่อไปเกี่ยวข้องกับการกำหนด Kinematics ของหุ่นยนต์ การวิเคราะห์จลนศาสตร์ของหุ่นยนต์เกี่ยวข้องกับคำอธิบายของการเคลื่อนที่ที่เกี่ยวข้องกับระบบพิกัดคงที่ ส่วนใหญ่เกี่ยวข้องกับการเคลื่อนไหวของหุ่นยนต์และการเคลื่อนไหวของร่างกายแต่ละส่วนในกรณีของหุ่นยนต์ขา โดยทั่วไปจะเกี่ยวข้องกับพลวัตของการเคลื่อนที่ของหุ่นยนต์ วิถีทั้งหมดของหุ่นยนต์ถูกกำหนดโดยใช้การวิเคราะห์ Kinematic ซึ่งสามารถทำได้โดยใช้ซอฟต์แวร์ Workspace
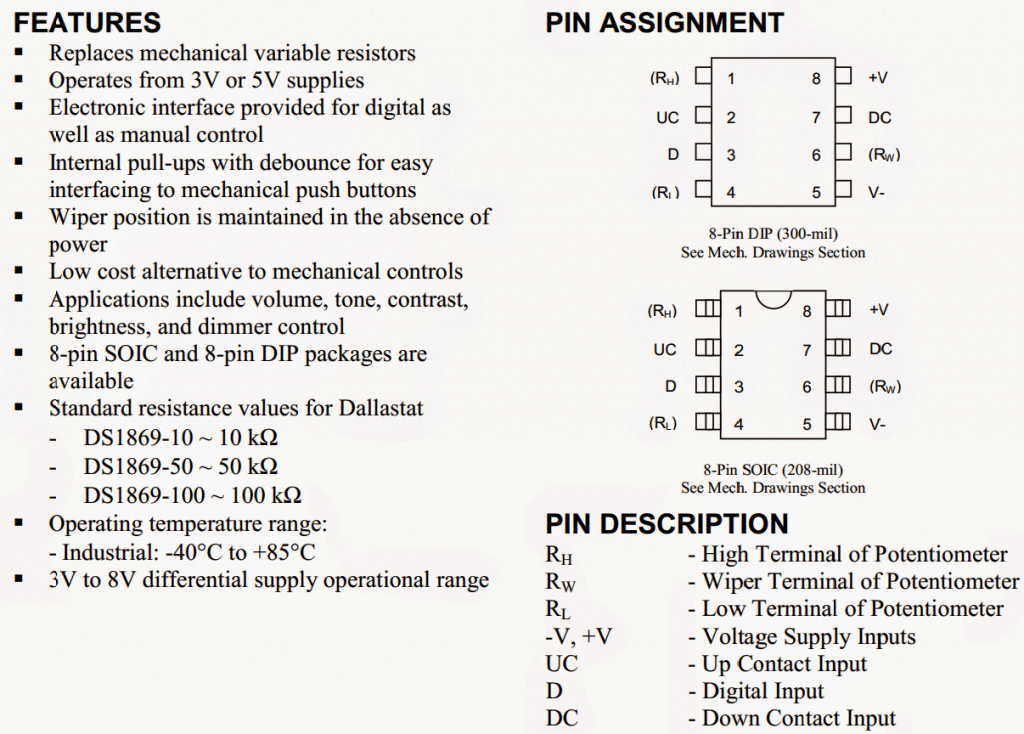
การควบคุมหุ่นยนต์เป็นสิ่งสำคัญที่สุดในการทำงาน ในที่นี้คำว่า control หมายถึงการควบคุมการเคลื่อนที่ของหุ่นยนต์เช่นการควบคุมการเคลื่อนที่ของล้อ หุ่นยนต์ผู้ติดตามสายพื้นฐานจะเดินตามเส้นทางที่แน่นอนและการเคลื่อนที่ของหุ่นยนต์ไปตามเส้นทางนี้ถูกควบคุมโดยการควบคุมการหมุนของล้อซึ่งวางอยู่บนเพลาของมอเตอร์ทั้งสองตัว ดังนั้นการควบคุมพื้นฐานทำได้โดยการควบคุมมอเตอร์ วงจรควบคุมเกี่ยวข้องกับการใช้เซ็นเซอร์เพื่อตรวจจับเส้นทางและ ไมโครคอนโทรลเลอร์ หรืออุปกรณ์อื่นใดเพื่อควบคุมการทำงานของมอเตอร์ผ่านตัวขับมอเตอร์โดยพิจารณาจากเอาต์พุตเซ็นเซอร์
2 วิธีในการควบคุม Line Follower Robot
- โดยไม่ต้องใช้ไมโครคอนโทรลเลอร์

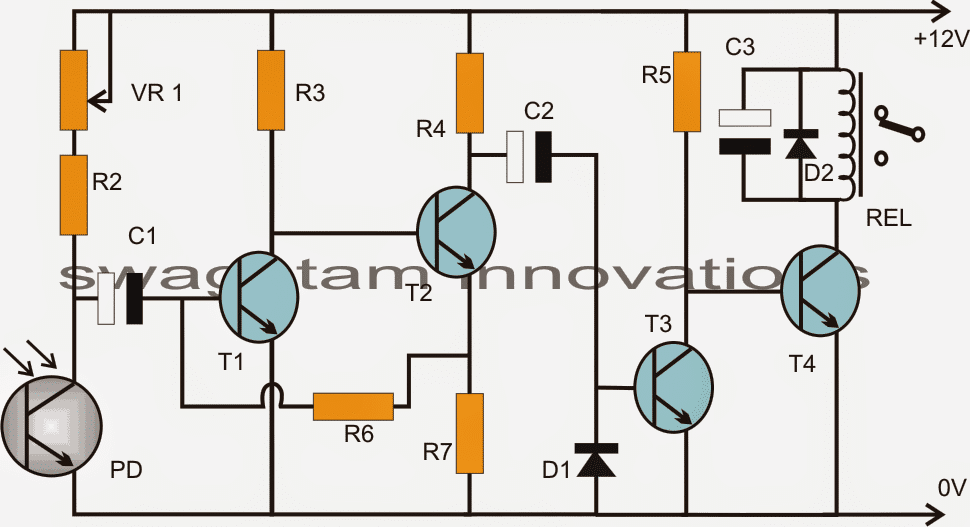
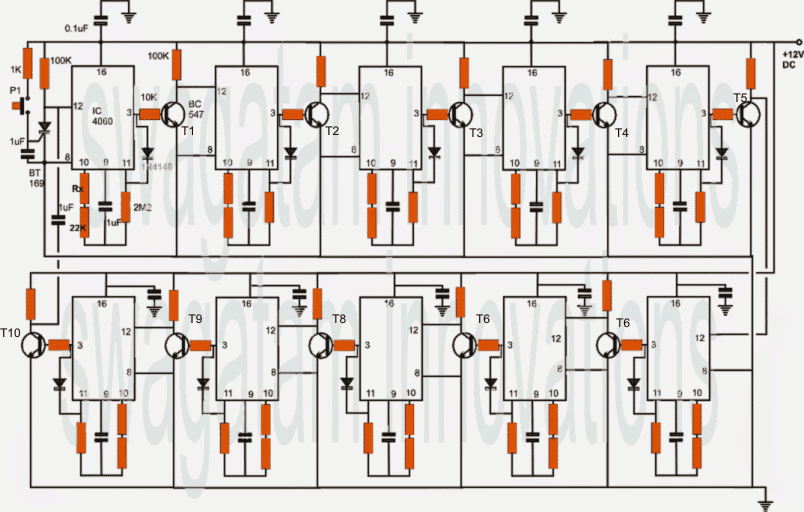
แผนภาพบล็อกของระบบควบคุม
ประกอบด้วยการจัดเรียง IR-LED และโฟโตไดโอดสำหรับมอเตอร์แต่ละตัวซึ่งควบคุมโดยการเปิดและปิดทรานซิสเตอร์
IR LED ในการรับน้ำหนักที่เหมาะสมจะปล่อยแสงอินฟาเรด แสง IR นี้จะสะท้อนในกรณีที่เป็นพื้นผิวสีขาวและแสง IR ที่สะท้อนจะตกกระทบกับโฟโตไดโอด ความต้านทานของโฟโตไดโอดจะลดลงซึ่งนำไปสู่การเพิ่มขึ้นของกระแสผ่านและทำให้แรงดันตกคร่อม โฟโตไดโอดเชื่อมต่อกับฐานของทรานซิสเตอร์และเป็นผลมาจากแรงดันไฟฟ้าที่เพิ่มขึ้นทั่วโฟโตไดโอดทรานซิสเตอร์จะเริ่มดำเนินการและทำให้มอเตอร์ที่เชื่อมต่อกับตัวสะสมของทรานซิสเตอร์ได้รับแหล่งจ่ายเพียงพอที่จะเริ่มหมุน ในกรณีที่มีสีดำบนเส้นทางที่พบโดยการจัดเรียงเซ็นเซอร์อย่างใดอย่างหนึ่งแสง IR จะไม่สะท้อนและโฟโตไดโอดมีความต้านทานมากขึ้นทำให้ทรานซิสเตอร์หยุดการนำไฟฟ้าและในที่สุดมอเตอร์ก็หยุดหมุน
ดังนั้นระบบทั้งหมดสามารถควบคุมได้โดยใช้การจัดเรียง LED-Photodiode-Transistor อย่างง่าย
- ด้วยการใช้ไมโครคอนโทรลเลอร์
หลักการทำงาน:
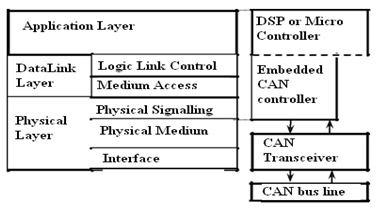
หุ่นยนต์ตกสายเป็นหนึ่งในหุ่นยนต์ปฏิบัติการด้วยตนเอง ที่ตรวจจับและล้มเส้นที่ลากบนพื้นที่ เส้นถูกระบุด้วยเส้นสีขาวบนพื้นผิวบล็อกหรือเส้นบล็อกบนพื้นผิวสีขาว ระบบนี้ต้องมีความหมาย แอปพลิเคชั่นนี้ขึ้นอยู่กับเซ็นเซอร์ ที่นี่เราใช้เซ็นเซอร์สองตัวเพื่อการตรวจจับเส้นทาง นั่นคือพร็อกซิมิตีเซ็นเซอร์และเซ็นเซอร์ IR เซ็นเซอร์ความใกล้เคียงที่ใช้สำหรับการตรวจจับเส้นทางและเซ็นเซอร์ IR ที่ใช้สำหรับการตรวจจับสิ่งกีดขวาง เซ็นเซอร์เหล่านี้ติดตั้งที่ส่วนหน้าของหุ่นยนต์ ไมโครคอนโทรลเลอร์เป็นอุปกรณ์อัจฉริยะที่วงจรทั้งหมดถูกควบคุมโดยไมโครคอนโทรลเลอร์

แผนภาพบล็อกของเส้นตามยานยนต์ด้วยไมโครคอนโทรลเลอร์
ยานยนต์หุ่นยนต์ควบคุมไลน์ประเภทต่างๆ:
มีสองประเภทของยานยนต์หุ่นยนต์ควบคุมไลน์
- ยานยนต์หุ่นยนต์ควบคุมตามสายมือถือ
- รถหุ่นยนต์ควบคุมด้วยสาย RF
การใช้งานหุ่นยนต์ผู้ติดตามไลน์:
- การใช้งานในอุตสาหกรรม : หุ่นยนต์เหล่านี้สามารถใช้เป็นผู้ให้บริการอุปกรณ์อัตโนมัติในอุตสาหกรรมที่เปลี่ยนสายพานลำเลียงแบบเดิมได้
- การใช้งานรถยนต์ : หุ่นยนต์เหล่านี้ยังสามารถใช้เป็น รถยนต์อัตโนมัติ วิ่งบนถนนที่มีแม่เหล็กฝังอยู่
- การใช้งานในประเทศ : สิ่งเหล่านี้สามารถใช้ที่บ้านเพื่อวัตถุประสงค์ในบ้านเช่นการทำความสะอาดพื้นเป็นต้น
- แอปพลิเคชันคำแนะนำ : สิ่งเหล่านี้สามารถใช้ในสถานที่สาธารณะเช่นห้างสรรพสินค้าพิพิธภัณฑ์ ฯลฯ เพื่อให้คำแนะนำเส้นทาง
ข้อดี:
- การเคลื่อนไหวของหุ่นยนต์เป็นไปโดยอัตโนมัติ
- ใช้สำหรับการใช้งานทางไกล
- ความเรียบง่ายของการสร้าง
- ระบบพอดีและลืม
- ใช้ในบ้านระบบอัตโนมัติในอุตสาหกรรมเป็นต้น