โพสต์นี้อธิบายถึงวงจรขับมอเตอร์ที่ควบคุมด้วยเลเซอร์แบบเส้นอย่างง่ายซึ่งทำงานโดยตอบสนองต่อเส้นเลเซอร์แนวนอนที่มีความแม่นยำซึ่งสร้างขึ้นจากอุปกรณ์ระดับเลเซอร์แบบเส้นและปรับการจัดตำแหน่งของเครื่องมือที่เชื่อมต่อโดยอัตโนมัติหรืองานที่ทำงานด้วยความสมบูรณ์แบบและแม่นยำ
Line Laser คืออะไร
อุปกรณ์เลเซอร์เส้นเป็นอุปกรณ์ทดแทนอิเล็กทรอนิกส์ที่มีความแม่นยำสูงของเครื่องจัดตำแหน่งระดับจิตวิญญาณของช่างไม้อายุเก่า
จริงๆแล้วอุปกรณ์เลเซอร์เส้นเป็นอุปกรณ์เปล่งแสงเลเซอร์ขั้นสูงที่สามารถสร้าง 360 ได้ ° เส้นเลเซอร์ส่องสว่างแนวนอนที่มีความแม่นยำสูงสำหรับการอ้างอิงการสอบเทียบสำหรับงานวิศวกรรมอุตสาหกรรมหรืองานก่อสร้างทั้งหมดเพื่อให้ผลลัพธ์สุดท้ายของงานตรงและจัดแนวอย่างสมบูรณ์โดยไม่มีข้อผิดพลาดแม้แต่นิดเดียว
วงจรนี้ได้รับการร้องขอจากหนึ่งในผู้อ่านเฉพาะของบล็อกนี้ Mr. Rafal
การอภิปรายโดยละเอียดเกี่ยวกับขั้นตอนการทำงานของมอเตอร์ควบคุมด้วยเลเซอร์แบบเส้นสามารถเรียนรู้ได้จากย่อหน้าต่อไปนี้:
วัตถุประสงค์การออกแบบ
นาย. Rafal: ฉันใหม่มากสำหรับเรื่องนี้ ฉันได้ทำการวิจัยในช่วงสองสามสัปดาห์ที่ผ่านมาและยังไม่พบสิ่งที่ต้องการ
ฉันจะขอบคุณสำหรับความช่วยเหลือใด ๆ ฉันแนบรูปถ่ายของความคิดของฉัน ฉันต้องการควบคุมมอเตอร์ 12 V DC สองตัวด้วยระดับเลเซอร์
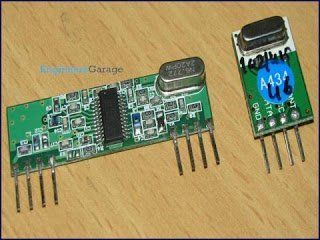
ระดับเลเซอร์เส้นจะส่งสัญญาณไปที่เครื่องรับ

จากนั้นสัญญาณนี้จะต้องควบคุมทิศทางของมอเตอร์ 12 V DC มอเตอร์จะหมุนแกนเกลียวไปมาเพื่อปรับความสูงของเครื่องมือ
จากสิ่งที่ฉันค้นพบจะมีโฟโตไดโอดหลายตัวเชื่อมต่อแบบขนานชุดหนึ่งตรวจจับเลเซอร์ที่อยู่เหนือระดับศูนย์และอีกชุดหนึ่งต่ำกว่าระดับนั้น ระดับโมฆะเป็นเพียงการหยุดชั่วคราวระหว่างโฟโตไดโอดเพื่อป้องกันไม่ให้ระบบตื่น เลเซอร์เซนเซอร์ไม่มีจอแสดงผล ฉันให้แค่รูปถ่ายเท่านั้น
ฉันต้องการวงจรสะพาน H แต่ทั้งหมดที่ฉันพบจะต้องใช้กับระบบ Arduino หากจำเป็นฉันสามารถซื้อสะพานสำเร็จรูปได้ในราคาที่สมเหตุสมผลถึง $ 30
ตามหลักการแล้วสิ่งนี้จะใช้ได้กับเลเซอร์ทั้งสีแดงและสีเขียว แต่ความยาวคลื่นต่างกันมากจนฉันสงสัยว่ามันจะทำได้และมันจะไม่ทำงานในสเปกตรัมแสงทั้งหมด
ในขั้นต้นฉันต้องการตั้งระดับของลำแสงนี้ที่ติดกับเครื่องยนต์ด้วยปุ่มขึ้น - ลง ฉันจะดีใจมากถ้ามอเตอร์ตัวที่สองจะปรับระดับตัวเองด้วยไจโรสโคปในขณะที่ตั้งค่า แต่ถ้าไม่มี Arduino มันอาจจะยากมาก
ฉันรู้สึกว่าสิ่งที่ฉันพยายามทำนั้นง่ายมากจนฉันสามารถหนีไปได้โดยไม่ต้องใช้ Arduino และฉันยืนยันในอะนาล็อกเนื่องจากเงื่อนไขที่ยากลำบากในสถานที่ก่อสร้างและสำหรับฉันแล้วดูเหมือนว่ายิ่งอุปกรณ์อิเล็กทรอนิกส์มากเท่าไหร่อุปกรณ์ก็ยิ่งไม่น่าเชื่อถือ
มันจะทำงานในอาคารเท่านั้นและระยะเลเซอร์สูงสุด 10 เมตร มอเตอร์ที่ฉันพบในตอนแรกมีการใช้กระแสไฟฟ้ามากถึง 200mA สูงสุด 2.19 A แต่ยังมีแรงบิดขนาดใหญ่
กำลังไฟ 18 V DC จากแบตเตอรี่ Makita
ขอบคุณล่วงหน้าสำหรับข้อเสนอแนะ
คำทักทายจากโปแลนด์
ราฟาล
ย้อย : ฉันมีความสับสนเกี่ยวกับการทำงานของเพลามอเตอร์ สกรูเกลียวบนมอเตอร์ทั้งสองตัวจะดันเครื่องมือ แต่ไม่สามารถดึงกลับได้? มันเป็นอย่างไร?
เป็นไปได้ไหมที่จะใช้มอเตอร์ตัวเดียว?
นาย. ราฟาล: ระยะการลดระดับต่ำลงอาจสูงถึง 70 ซม. สำหรับห้องขนาดเล็กเท่านั้นเช่น ห้องน้ำเพื่อให้คุณสามารถเข้าทางประตูได้
เครื่องจักรที่ไม่มีไดรฟ์ดึงด้วยมือปรับระดับเท่านั้น ในวิดีโอวัตถุสีเหลืองสองชิ้นบนเสากระโดงคือเครื่องตรวจจับเลเซอร์ที่ติดอยู่กับขอบตรงอย่างแน่นหนา
เลเซอร์กำลังยืนอยู่ที่ไหนสักแห่งที่ไกลออกไปและทำให้เกิดเส้นแนวนอน
มอเตอร์จะติดอยู่กับรถเข็นและใช้สกรูแบบเกลียวเพื่อปรับระดับให้ตรงด้วยเครื่องตรวจจับเลเซอร์ ต้องมีมอเตอร์สองตัวเพื่อปรับระดับทั้งสองด้าน แต่เป็นภาพสะท้อนในกระจก
ส่วนที่พบได้ทั่วไปเพียงอย่างเดียวคือสะพาน H สองช่องทางราวกับว่าฉันทำจากโมดูลสำเร็จรูปและอาจเป็นไจโรสโคป แต่นั่นเป็นความฝัน :)
สิ่งสำคัญคือมีปุ่มสำหรับการหมุนรอบมอเตอร์ซ้ายและขวา
ขั้นตอนมีดังนี้ ฉันแขวนเลเซอร์ไว้สูงกว่าระดับพื้นที่กำหนดไว้ 2 ม. ฉันวัด 2 เมตรจากลำแสงเลเซอร์ถึงขอบด้านล่างของเส้นตรง
ฉันควบคุมความสูงของปุ่มกดที่สวิตช์ซ้าย - ขวาเพื่อให้มันเท่ากับ 2 เมตรไปที่ขอบด้านล่างของเส้นตรง ฉันวางเครื่องตรวจจับบนเสากระโดงเพื่อให้ลำแสงเลเซอร์อยู่ที่ระดับศูนย์ระหว่างส่วนโฟโตไดโอด และส่วนที่เหลือจะทำเอง
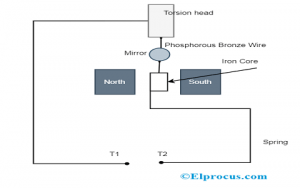
ในเอกสารแนบฉันได้วาดภาพการทำงานของเครื่องตรวจจับ
ราฟาล
การออกแบบวงจร

เมื่อพิจารณาจากรูปด้านบนจะต้องใช้ขั้นตอนของวงจรที่เหมือนกันสองขั้นในการตรวจจับและแก้ไขเครื่องมือควบคุมมอเตอร์ที่เกี่ยวข้องกับความแม่นยำของเส้นเลเซอร์
สองขั้นตอนที่เหมือนกันคือภาพสะท้อนของกันและกันดังที่แสดงด้านล่าง:

วงจรค่อนข้างตรงไปตรงมา ทำงานร่วมกับเครื่องเปรียบเทียบหน้าต่างซึ่งช่วยให้มั่นใจได้ว่ามอเตอร์ของไดรฟ์ไม่สามารถทำงานได้ตราบใดที่ LDR ทั้งคู่สัมผัสกับความสว่างของเส้นเลเซอร์ที่เท่ากัน
จากนั้นแรงดันไฟฟ้าครึ่งหนึ่งจะถูกสร้างขึ้นบนอินพุตที่ไม่กลับด้านของ A1 และไปยังอินพุตกลับด้านของ A2
ทันทีที่ตรวจพบการเบี่ยงเบนของเส้นเลเซอร์ (ซึ่งอาจเกิดขึ้นได้หากเครื่องมือที่ควบคุมด้วยมอเตอร์ไม่ได้จัดแนวตรง) ความสว่างที่ส่งผลต่อ LDRs R1 และ R2 จะเปลี่ยนไป
ในสถานการณ์นี้แรงดันไฟฟ้าขาเข้าของตัวเปรียบเทียบหน้าต่างจะลอยห่างจากแรงดันไฟฟ้าครึ่งหนึ่ง สถานการณ์นี้ทำให้เอาท์พุทตัวเปรียบเทียบสั่งให้เครือข่ายบริดจ์มอเตอร์เคลื่อนมอเตอร์ไปในทิศทางตามเข็มนาฬิกาหรือทวนเข็มนาฬิกา
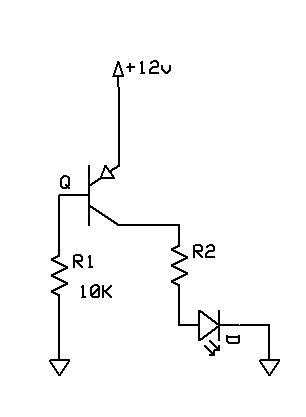
ทรานซิสเตอร์ T1. . . T4 ได้รับการกำหนดค่าเหมือนเครือข่ายบริดจ์เพื่อเปิดใช้งานการสลับมอเตอร์เข้า ทิศทางไปข้างหน้าและย้อนกลับ ขึ้นอยู่กับการส่องสว่าง LDR หรือมุมเบี่ยงเบนของเส้นเลเซอร์
ไดโอด D1 . . D4 อยู่ในตำแหน่งเพื่อยกเลิกจุดสูงสุดของแรงดันไฟฟ้าที่สร้างขึ้นในช่วงเวลาที่มอเตอร์กำลังทำงานและทำงานอยู่ ฟังก์ชันของโพเทนชิโอมิเตอร์ที่ตั้งไว้ล่วงหน้า P1 และ P2 มีไว้เพื่ออำนวยความสะดวกในการปรับแนว
สิ่งเหล่านี้ได้รับการปรับแต่งอย่างละเอียดเพื่อให้แน่ใจว่ามอเตอร์ปิดสนิทและไม่มีการใช้งานตราบใดที่คู่ LDR ที่เกี่ยวข้องสัมผัสกับความสว่างของแสงเลเซอร์ที่เท่ากันทุกประการ
ตัวอย่างเช่นเนื่องจากการจัดตำแหน่งของเครื่องมือที่ควบคุมด้วยมอเตอร์ไม่ถูกต้องการเอียงของเส้นเลเซอร์ทำให้แสงบน LDR R2 ลดลงมากกว่า LDR R1 ซึ่งจะส่งผลให้แรงดันไฟฟ้าที่จุด A สูงเกินครึ่งหนึ่งของแรงดันไฟฟ้า
ในสถานการณ์เช่นนี้เอาท์พุต A1 op amp จะสูงบังคับให้ทรานซิสเตอร์ T1 และ T4 ทำงาน ซึ่งจะทำให้มอเตอร์หมุนไปในทิศทางที่เกี่ยวข้อง การดำเนินการนี้จะเลื่อนเครื่องมือที่เชื่อมต่อเป็นเส้นตรงโดยอัตโนมัติจนกว่าความแม่นยำในการจัดแนวแนวนอนจะตรงกับความแม่นยำของเส้นเลเซอร์
ในทางกลับกันถ้าเราสมมติว่าเครื่องมือเอียงไปในทิศทางตรงกันข้ามเช่นการส่องสว่างของ LDR นั้นตรงข้ามกับที่กล่าวไว้ข้างต้นจะทำให้แรงดันไฟฟ้าที่จุด A ลดลงต่ำกว่าครึ่งหนึ่งของแรงดันไฟฟ้า เงื่อนไขนี้ทริกเกอร์เอาต์พุต A2 op amp ให้สูงขึ้นเพื่อให้ T3 และ T2 ทำงานได้
ซึ่งส่งผลให้ขณะนี้มอเตอร์ทำงานในทิศทางตรงกันข้ามในความพยายามที่จะแก้ไขการจัดแนวของเครื่องมือในทิศทางที่เกี่ยวข้องจนกว่าจะตรงอย่างสมบูรณ์แบบตรงกับความแม่นยำในแนวนอนของเส้นเลเซอร์
ปุ่มขึ้น / ลง
ปุ่มขึ้นลงสำหรับการตั้งค่าความสูงของระดับวิญญาณในตอนแรกสามารถใช้งานได้ง่ายๆโดยการเดินสายสวิตช์ปุ่มกดขนานกับ LDR แต่ละตัว
การติดตั้ง LDR
เพื่อให้ได้การตอบสนองที่ถูกต้องจาก LDR ต้องติดตั้งคู่ซ้ายขวาภายในท่อเหมือนกล่องหุ้มเพื่อให้สามารถ 'มองเห็น' เฉพาะการส่องสว่างของเลเซอร์เท่านั้นไม่ใช่แสงโดยรอบอื่น ๆ
แนวคิดนี้สามารถเห็นได้ในภาพต่อไปนี้:

ที่นี่เราจะเห็นว่า LDR อยู่ในตำแหน่งใกล้กันมากซึ่งทำให้แน่ใจได้ว่าเมื่อเส้นเลเซอร์อยู่ที่กึ่งกลางที่แน่นอนบางส่วนของคู่ LDR ทั้งสองจะได้รับแสงเลเซอร์อย่างสม่ำเสมอ
ด้านหน้าของกล่องหุ้ม LDR สามารถปิดด้วยเลนส์กระจายแสงเพื่อให้แสงเลเซอร์สามารถกระจายภายในผ่าน LDR ตามลำดับได้อย่างสม่ำเสมอ
คู่ของ: วงจรสัญญาณกันขโมยอย่างง่ายเพื่อปกป้องสิ่งของมีค่า ถัดไป: Universal BJT, JFET, MOSFET Tester Circuit