บทความนี้นำเสนอการออกแบบวงจรสกู๊ตเตอร์ไฟฟ้าอย่างง่ายซึ่งสามารถปรับเปลี่ยนเพื่อสร้างรถลากไฟฟ้าอัตโนมัติได้ นายสตีฟขอแนวคิดดังกล่าว
คำขอวงจร
ฉันโชคดีพอที่จะพบบล็อกของคุณสิ่งที่น่าทึ่งจริงๆที่คุณสามารถออกแบบได้
ฉันกำลังมองหาไฟล์ DC เป็น DC Step Up และตัวควบคุมสำหรับมอเตอร์สกู๊ตเตอร์ไฟฟ้า
อินพุต: SLA (ปิดผนึก - ตะกั่ว - กรด) แบตเตอรี่ 12V ซึ่งชาร์จ ~ 13.5V
แรงดันไฟฟ้าขั้นต่ำ - ตัดที่ ~ 10.5V
เอาต์พุต: มอเตอร์ 60V DC 1000W.
คุณเจอวงจรแบบนั้นหรือเปล่า?
ฉันสามารถนึกภาพได้ว่ามันจะเป็นแบบ push-pull แต่ไม่รู้ว่าประเภทของ mosfets (ให้กำลังวัตต์ 80-100A) ขับพวกมันจากนั้นหม้อแปลงประเภทแกนและไดโอด
บวกแรงดันไฟฟ้าขั้นต่ำที่ตัดเพื่อปิดวงจรการทำงานของ PWM
ฉันได้พบข้อมูลเพิ่มเติม มอเตอร์ 3 เฟสแบบไม่มีแปรงพร้อมเซ็นเซอร์ฮอลล์
มีสองวิธีในการเข้าใกล้ a / ปล่อยคอนโทรลเลอร์ที่มีอยู่ไว้และทำเฉพาะ 12V ถึง 60V ขึ้นไปหรือ b / เปลี่ยนคอนโทรลเลอร์ด้วย
ประสิทธิภาพการใช้พลังงานจะไม่มีความแตกต่างกัน ตัวควบคุม เพียงแค่เปลี่ยนเฟสที่รับกระแสตามเซ็นเซอร์ฮอลล์ ดังนั้นการปฏิบัติตามแผนก.
ขอบคุณมาก,
สตีฟ

การออกแบบ
ทุกวันนี้การสร้างรถยนต์ไฟฟ้าทำได้ง่ายกว่าที่เคยเป็นมาก่อนหน้านี้มากและสิ่งนี้เกิดขึ้นได้เนื่องจากองค์ประกอบหลักสองประการในการออกแบบ ได้แก่ มอเตอร์ BLDC และ Li-ion หรือแบตเตอรี่ Li-polymer
สมาชิกที่มีประสิทธิภาพเป็นพิเศษทั้งสองนี้ทำให้แนวคิดของยานยนต์ไฟฟ้ากลายเป็นความจริงและเป็นไปได้ในทางปฏิบัติ
ทำไมต้อง BLDC Motor
มอเตอร์ BLDC หรือมอเตอร์ไร้แปรงถ่านมีประสิทธิภาพเนื่องจากออกแบบมาให้ทำงานโดยไม่มีหน้าสัมผัสทางกายภาพยกเว้นลูกปืนของเพลา
ในมอเตอร์ BLDC โรเตอร์จะหมุนเพียงอย่างเดียวโดยอาศัยแรงแม่เหล็กทำให้ระบบมีประสิทธิภาพสูงมากตรงกันข้ามกับมอเตอร์แบบแปรงก่อนหน้านี้ซึ่งมีโรเตอร์ติดอยู่กับแหล่งจ่ายผ่านแปรงทำให้เกิดแรงเสียดทานเกิดประกายไฟและการสึกหรอในระบบ
ทำไมต้องใช้แบตเตอรี่ Li-Ion
ในบรรทัดที่คล้ายกันการถือกำเนิดของแบตเตอรี่ Li-ion ที่ได้รับการอัพเกรดมากและแบตเตอรี่ Lipo ในปัจจุบันการผลิตไฟฟ้าจากแบตเตอรี่ไม่ถือว่าเป็นแนวคิดที่ไม่มีประสิทธิภาพอีกต่อไป
ก่อนหน้านี้เรามีแบตเตอรี่ตะกั่วกรดเท่านั้นสำหรับระบบสำรอง DC ทั้งหมดซึ่งทำให้เกิดข้อเสียที่สำคัญสองประการ: คู่ค้าเหล่านี้ต้องใช้เวลาในการชาร์จมากมีอัตราการคายประจุที่ จำกัด อายุการใช้งานที่ต่ำลงและมีขนาดใหญ่และหนักทั้งหมดนี้เพิ่มเพียง กับลักษณะการทำงานที่ไม่มีประสิทธิภาพ
ตรงข้ามกับสิ่งนี้ Li-ion หรือ Li-po batts มีน้ำหนักเบากะทัดรัดชาร์จได้อย่างรวดเร็วในอัตรากระแสสูงและสามารถคายประจุได้ในอัตรากระแสสูงที่ต้องการสิ่งเหล่านี้มีอายุการใช้งานที่สูงขึ้นเป็นประเภท SMF คุณสมบัติทั้งหมดเหล่านี้ทำให้เป็น ผู้สมัครที่เหมาะสมสำหรับการใช้งานเช่นสกูตเตอร์ไฟฟ้ารถลากไฟฟ้า โดรนโดรน เป็นต้น
แม้ว่ามอเตอร์ BLDC จะมีประสิทธิภาพสูงมาก แต่ก็ต้องใช้ IC เฉพาะในการขับเคลื่อนขดลวดสเตเตอร์วันนี้เรามีผู้ผลิตจำนวนมากที่ผลิตโมดูล IC รุ่นถัดไปซึ่งไม่เพียง แต่ทำหน้าที่พื้นฐานในการใช้งานมอเตอร์เหล่านี้เท่านั้น แต่ยังระบุไว้ด้วยขั้นสูงเพิ่มเติมอีกมากมาย คุณสมบัติเช่น: การควบคุมวงเปิด PWM, เซ็นเซอร์ช่วยการควบคุมวงปิด, การป้องกันที่ไม่สามารถเข้าใจได้หลายอย่าง, การควบคุมย้อนกลับ / เดินหน้าของมอเตอร์, การควบคุมเบรกและคุณสมบัติที่ล้ำสมัยอื่น ๆ อีกมากมาย
การใช้วงจรขับ BLDC
ฉันได้พูดถึงชิปที่ยอดเยี่ยมเช่นนี้ในโพสต์ก่อนหน้าของฉันซึ่งออกแบบมาโดยเฉพาะสำหรับการจัดการมอเตอร์ BLDC ที่มีกำลังวัตต์สูงนั่นคือ MC33035 IC จาก Motorola
มาเรียนรู้วิธีการนำโมดูลนี้ไปใช้อย่างมีประสิทธิภาพเพื่อสร้างสกู๊ตเตอร์ไฟฟ้าหรือรถลากไฟฟ้าในบ้านของคุณ
ฉันจะไม่พูดถึงรายละเอียดเชิงกลของรถ แต่เป็นเพียงวงจรไฟฟ้าและรายละเอียดการเดินสายไฟของระบบ
แผนภูมิวงจรรวม

ส่วนรายการ
ตัวต้านทานทั้งหมดรวมถึง Rt แต่ไม่รวม Rs และ R = 4k7, 1/4 วัตต์
กะรัต = 10nF
โพเทนชิออมิเตอร์ความเร็ว = 10K Linear
BJT กำลังบน = TIP147
Mosfets ล่าง = IRF540
Rs = 0.1 / ความจุกระแสสูงสุดของสเตเตอร์
R = 1K
C = 0.1 ยูเอฟ
รูปด้านบนแสดง IC MC33035 มอเตอร์ DC มอเตอร์ 3 เฟสแบบไม่มีแปรงกำลังวัตต์สูงเต็มเปี่ยมซึ่งเหมาะอย่างยิ่งสำหรับสกู๊ตเตอร์ไฟฟ้าหรือแอปพลิเคชันรถลากไฟฟ้าที่นำเสนอ
อุปกรณ์นี้มีคุณสมบัติพื้นฐานทั้งหมดที่คาดว่าจะมีอยู่ในรถเหล่านี้และหากจำเป็น IC อาจได้รับการปรับปรุงด้วยคุณสมบัติขั้นสูงเพิ่มเติมผ่านการกำหนดค่าอื่น ๆ ที่เป็นไปได้
คุณสมบัติขั้นสูงจะเป็นไปได้โดยเฉพาะเมื่อกำหนดค่าชิปในโหมดวงปิดอย่างไรก็ตามแอปพลิเคชันที่กล่าวถึงนี้เป็นการกำหนดค่าลูปแบบเปิดซึ่งเป็นการกำหนดค่าที่ต้องการมากกว่าเนื่องจากสามารถกำหนดค่าได้ง่ายมากและยังสามารถตอบสนองคุณสมบัติที่จำเป็นทั้งหมดได้ ที่คาดว่าอาจเกิดขึ้นในรถยนต์ไฟฟ้า
เราได้พูดคุยกันแล้ว ฟังก์ชัน pinout ของชิปนี้ ในบทที่แล้วขอสรุปแบบเดียวกันและทำความเข้าใจว่า IC ข้างต้นอาจจำเป็นต้องใช้เพื่อให้บรรลุการดำเนินการต่างๆที่เกี่ยวข้องกับรถยนต์ไฟฟ้าได้อย่างไร
วิธีการทำงานของ IC
ส่วนที่เป็นสีเขียวคือ MC 33035 IC ซึ่งแสดงวงจรที่ซับซ้อนในตัวทั้งหมดที่ฝังอยู่ภายในชิปและสิ่งที่ทำให้มันล้ำหน้าด้วยประสิทธิภาพของมัน
ส่วนที่แรเงาสีเหลืองคือมอเตอร์ซึ่งรวมถึงสเตเตอร์ 3 เฟสที่ระบุโดยขดลวดทั้งสามในการกำหนดค่า 'เดลต้า' โรเตอร์ทรงกลมที่ระบุด้วยแม่เหล็กขั้ว N / S และเซ็นเซอร์ Hall effect สามตัวที่ด้านบน
สัญญาณจากฮอลล์เอฟเฟกต์เซ็นเซอร์สามตัวจะถูกป้อนไปยังพิน nos 4, 5, 6 ของ IC สำหรับการประมวลผลภายในและสร้างลำดับการสลับเอาต์พุตที่สอดคล้องกันในอุปกรณ์กำลังเอาต์พุตที่เชื่อมต่อ
ฟังก์ชัน Pinout และการควบคุม
Pinouts 2, 1 และ 24 ควบคุมอุปกรณ์จ่ายไฟส่วนบนที่กำหนดค่าจากภายนอกในขณะที่หมุด 19, 20, 21 ได้รับการกำหนดให้ควบคุมอุปกรณ์จ่ายไฟซีรีย์ล่างที่เสริม ซึ่งร่วมกันควบคุมมอเตอร์ยานยนต์ BLDC ที่เชื่อมต่อตามคำสั่งป้อนต่างๆ
เนื่องจาก IC ได้รับการกำหนดค่าในโหมดลูปเปิดจึงควรเปิดใช้งานและควบคุมโดยใช้สัญญาณ PWM ภายนอกซึ่งรอบการทำงานควรกำหนดความเร็วของมอเตอร์
อย่างไรก็ตาม IC อัจฉริยะนี้ไม่จำเป็นต้องใช้วงจรภายนอกในการสร้าง PWM แต่มันถูกจัดการโดยออสซิลเลเตอร์ในตัวและวงจรแอมป์ข้อผิดพลาดสองสามตัว
ส่วนประกอบ Rt และ Ct ถูกเลือกอย่างเหมาะสมสำหรับการสร้างความถี่ (20 ถึง 30 kHz) สำหรับ PWM ซึ่งป้อนให้กับพิน # 10 ของ IC สำหรับการประมวลผลต่อไป
ข้างต้นทำผ่านแรงดันไฟฟ้า 5V ที่สร้างโดย IC เองที่พิน # 8 แหล่งจ่ายนี้ใช้พร้อมกันสำหรับป้อนอุปกรณ์ Hall effect ดูเหมือนว่าทุกอย่างจะเสร็จสมบูรณ์ที่นี่ .... ไม่มีอะไรเสีย
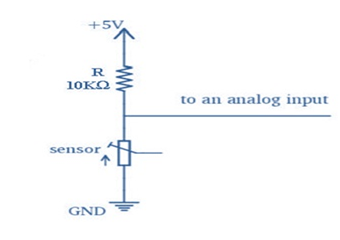
ส่วนที่แรเงาด้วยสีแดงเป็นส่วนควบคุมความเร็วของการกำหนดค่าดังที่เห็นได้ว่ามันสร้างขึ้นโดยใช้โพเทนชิออมิเตอร์ธรรมดาตัวเดียว .... การผลักดันขึ้นไปจะเพิ่มความเร็วและในทางกลับกัน สิ่งนี้ทำให้เป็นไปได้ผ่านรอบการทำงาน PWM ที่แตกต่างกันไปใน พิน # 10, 11, 12, 13 .
โพเทนชิออมิเตอร์สามารถแปลงเป็นวงจรประกอบ LDR / LED เพื่อให้ได้ การควบคุมความเร็วเหยียบแบบไม่เสียดสี ในรถ
พิน # 3 มีไว้สำหรับกำหนดทิศทางไปข้างหน้าย้อนกลับของการหมุนของมอเตอร์หรือมากกว่าสกูตเตอร์หรือทิศทางของรถลาก มันหมายความว่าตอนนี้สกู๊ตเตอร์ไฟฟ้าหรือรถลากไฟฟ้าของคุณจะมีสิ่งอำนวยความสะดวกในการถอยหลัง .... ลองนึกภาพรถสองล้อที่มีระบบถอยหลัง ..... น่าสนใจไหม?
พิน # 3 สามารถมองเห็นได้ด้วยสวิตช์การปิดสวิตช์นี้จะทำให้ขา # 3 ลงกราวด์ทำให้สามารถเคลื่อนที่ไปข้างหน้าไปยังมอเตอร์ได้ในขณะที่เปิดจะทำให้มอเตอร์หมุนไปในทิศทางตรงกันข้าม (pin3 มีตัวต้านทานแบบดึงขึ้นภายในดังนั้นการเปิด สวิตช์ไม่ก่อให้เกิดอันตรายต่อ IC)
ในทำนองเดียวกันสวิตช์พิน # 22 จะเลือกการตอบสนองของสัญญาณกะระยะของมอเตอร์ที่เชื่อมต่อสวิตช์นี้จะต้องเปิดหรือปิดอย่างเหมาะสมโดยอ้างอิงกับข้อมูลจำเพาะของมอเตอร์หากใช้มอเตอร์แบบเฟส 60 องศาสวิตช์จะต้องปิดอยู่เสมอ และเปิดสำหรับมอเตอร์เฟส 120 องศา
พิน # 16 เป็นขากราวด์ของ IC และจำเป็นต้องเชื่อมต่อกับสายลบของแบตเตอรี่และ / หรือสายกราวด์ทั่วไปที่เกี่ยวข้องกับระบบ
พิน # 17 คือ Vcc หรือพินอินพุตบวกพินนี้จะต้องเชื่อมต่อกับแรงดันไฟฟ้าระหว่าง 10V ถึง 30V, 10V เป็นค่าต่ำสุดและ 30V เป็นขีด จำกัด การสลายสูงสุดสำหรับ IC
พิน # 17 อาจรวมเข้ากับ 'Vm' หรือสายจ่ายของมอเตอร์หากรายละเอียดการจ่ายมอเตอร์ตรงกับข้อกำหนด IC Vcc มิฉะนั้นอาจจัดหา pin17 จากขั้นตอนการควบคุมขั้นตอนลงที่แยกต่างหาก
พิน # 7 คือพิน 'เปิดใช้งาน' ของ IC พินนี้สามารถมองเห็นได้สิ้นสุดลงที่กราวด์ผ่านสวิตช์ตราบเท่าที่เปิดสวิตช์และพิน # 7 ยังคงต่อสายดินอยู่มอเตอร์จะได้รับอนุญาตให้ทำงานต่อเมื่อปิดสวิตช์ มอเตอร์ถูกปิดใช้งานส่งผลให้มอเตอร์หมุนไปที่ชายฝั่งจนในที่สุดก็หยุดลง โหมดชายฝั่งอาจหยุดทำงานอย่างรวดเร็วหากมอเตอร์หรือยานพาหนะอยู่ภายใต้ภาระบางส่วน
พิน # 23 ถูกกำหนดด้วยความสามารถในการ 'เบรก' และทำให้มอเตอร์หยุดและหยุดเกือบจะทันทีเมื่อสวิตช์ที่เกี่ยวข้องเปิดอยู่ มอเตอร์ได้รับอนุญาตให้ทำงานตามปกติตราบใดที่สวิตช์นี้ปิดอยู่และขา # 7 ต่อสายดิน
ฉันขอแนะนำให้ Gang-up สวิตช์ที่พิน # 7 (เปิดใช้งาน) และพิน # 23 (เบรค) เข้าด้วยกันเพื่อให้สิ่งเหล่านี้ถูกสลับด้วยแอ็คชั่นคู่และร่วมกันสิ่งนี้อาจช่วยในการ 'ฆ่า' การหมุนของมอเตอร์ได้อย่างมีประสิทธิภาพและรวมกัน และยังเปิดใช้งานมอเตอร์ให้ทำงานด้วยสัญญาณรวมจาก pnouts สองตัว
'Rs' เป็นตัวต้านทานความรู้สึกที่รับผิดชอบในการตรวจสอบการโอเวอร์โหลดหรือเกินสภาวะปัจจุบันของมอเตอร์ภายใต้สถานการณ์เช่นนี้ เงื่อนไข 'ความผิดปกติ' จะถูกกระตุ้นให้ปิดมอเตอร์ทันทีและ IC จะเข้าสู่โหมดล็อคเอาต์ภายใน เงื่อนไขจะยังคงอยู่ในโหมดนี้จนกว่าข้อบกพร่องจะได้รับการแก้ไขและคืนสภาพปกติ
นี่เป็นการสรุปคำอธิบายโดยละเอียดเกี่ยวกับ pinouts ต่างๆของ pinouts โมดูลควบคุมสกู๊ตเตอร์ไฟฟ้า / รถลากที่นำเสนอ เพียงแค่ต้องนำไปใช้อย่างถูกต้องตามข้อมูลการเชื่อมต่อที่แสดงในแผนภาพเพื่อให้การใช้งานยานพาหนะประสบความสำเร็จและปลอดภัย
นอกจากนี้ IC MC33035 ยังมีคุณสมบัติการป้องกันในตัวอีกสองสามอย่างเช่นการปิดกั้นภายใต้แรงดันไฟฟ้าซึ่งช่วยให้มั่นใจได้ว่ารถจะดับลงหากในกรณีที่ IC ถูกยับยั้งจากแรงดันไฟฟ้าขั้นต่ำที่ต้องการและยังมีการป้องกันความร้อนเกิน IC ไม่เคยทำงานกับอุณหภูมิที่สูงเกินไป
วิธีเชื่อมต่อแบตเตอรี่ (แหล่งจ่ายไฟ)
ตามคำขอรถยนต์ไฟฟ้าถูกระบุให้ทำงานกับอินพุต 60V และผู้ใช้ร้องขอสำหรับ เพิ่มตัวแปลง สำหรับการรับแรงดันไฟฟ้าในระดับที่สูงขึ้นนี้จากแบตเตอรี่ขนาดเล็ก 12V หรือ 24V
อย่างไรก็ตามการเพิ่มตัวแปลงบูสต์อาจทำให้วงจรซับซ้อนขึ้นโดยไม่จำเป็นและอาจเพิ่มประสิทธิภาพให้เป็นไปได้ แนวคิดที่ดีกว่าคือใช้แบตเตอรี่ขนาด 12V 5nos ในซีรีส์ สำหรับเวลาสำรองและกระแสไฟฟ้าที่เพียงพอสำหรับมอเตอร์ขนาด 1,000 วัตต์แบตเตอรี่แต่ละก้อนอาจได้รับการจัดอันดับที่ 25AH หรือมากกว่า
การเดินสายแบตเตอรี่อาจทำได้โดยดูรายละเอียดการเชื่อมต่อต่อไปนี้:

คู่ของ: วงจรควบคุมมอเตอร์ไร้แปรงถ่านกำลังวัตต์สูง ถัดไป: Boost Converters ทำงานอย่างไร