ในบทความนี้เราศึกษา IC KMY 24 เซ็นเซอร์ไมโครเวฟและพยายามทำความเข้าใจคุณสมบัติหลักและรายละเอียดการใช้งานที่ชัดเจน
Doppler Sensor KMY24 ทำงานอย่างไร
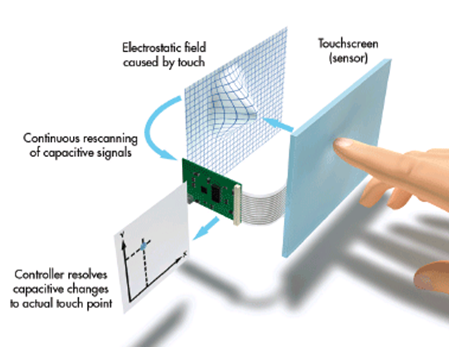
โมดูลเซ็นเซอร์ไมโครเวฟ KMY24 ได้รับการออกแบบและสร้างขึ้นตามแนวคิดของเอฟเฟกต์ Doppler เมื่อกำหนดค่าอย่างถูกต้องจะแผ่สัญญาณไมโครเวฟพลังงานต่ำประมาณ 2.45 GHz ทั่วโซนที่กำหนด
เมื่อวัตถุ (เป้าหมาย) ที่อาจเป็นมนุษย์อยู่ในช่วงของสัญญาณที่ปล่อยออกมาสัญญาณจะสะท้อนกลับไปยังโมดูลเซ็นเซอร์พร้อมกับความรบกวนบางอย่างที่สัมพันธ์กับความถี่ดั้งเดิมสิ่งนี้นิยมเรียกว่า Doppler shift


เมื่อเซ็นเซอร์ตรวจพบการเปลี่ยนความถี่ที่สะท้อนนี้วงจรในตัวจะผสมความถี่ที่สะท้อนกับความถี่ดั้งเดิมที่มีอยู่ทันทีและสร้างความถี่สองความถี่ในเอาต์พุตที่ระบุ
Doppler Effect คืออะไร
ตามหลักการของเอฟเฟกต์ Doppler การกะระยะความถี่นี้อาจเป็นบวกหรือลบขึ้นอยู่กับว่าวัตถุในโซนเซ็นเซอร์ถอยหรือเข้าใกล้เซ็นเซอร์
ฟังก์ชันของ KMY24 สรุปได้ที่นี่และตอนนี้จำเป็นต้องขยายเอาต์พุตจากอุปกรณ์ผ่านการกำหนดค่าแอมพลิฟายเออร์แรงดันไฟฟ้าที่เหมาะสมเช่นผ่านวงจรแอมพลิฟายเออร์ opamp ที่แตกต่างกันเป็นต้น
เพิ่มเติมเกี่ยวกับเอาต์พุต opamp อาจถูกยกเลิกอย่างเหมาะสมด้วยสเตจรีเลย์หรือเครื่องบันทึกหรือสัญญาณเตือนสำหรับการแยกแยะหรือระบุพารามิเตอร์ที่รับรู้
คุณสมบัติทางเทคนิคของ IC
คุณสมบัติหลักของ IC KMY24 สามารถเรียนรู้ได้ดังต่อไปนี้:
- ความไวสูงและการตรวจจับแม้ว่าเป้าหมายที่ค่อนข้างเล็กจะเข้าใกล้โซน
- วงจรมิกเซอร์คู่สำหรับตรวจจับการเคลื่อนที่ของเป้าหมาย
- ความน่าเชื่อถือสูงเพื่อให้ได้ผลลัพธ์การพิสูจน์คนโง่
- การใช้พลังงานที่น้อยลงทำให้เหมาะอย่างยิ่งสำหรับการใช้งานแบตเตอรี่
- การปล่อยฮาร์มอนิกน้อยที่สุดเพื่อลดการรบกวนของ RF ในชั้นบรรยากาศ
- ขนาดกะทัดรัด
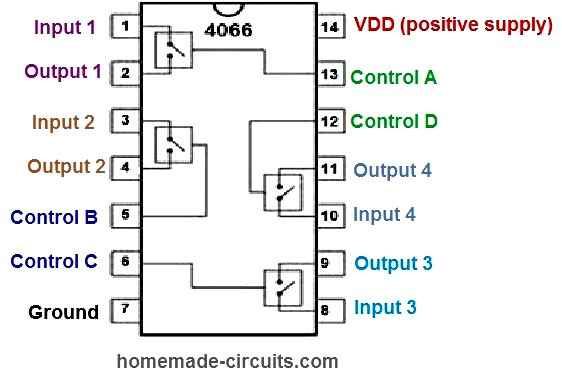
ภาพต่อไปนี้แสดงรายละเอียดของเซ็นเซอร์ไมโครเวฟ KMY 24
รายละเอียด Pinout ของ IC เซ็นเซอร์ไมโครเวฟ

ภาพถัดไปแสดงพารามิเตอร์การแยกย่อยหรือแรงดันไฟฟ้าสูงสุดสัมบูรณ์และพิกัดกระแสที่ต้องใช้กับ IC พารามิเตอร์เหล่านี้ต้องไม่เกินเพื่อให้แม่นยำต้องเก็บไว้ให้ต่ำกว่าค่าที่แสดง
ข้อกำหนดความทนทานต่อไฟฟ้าสูงสุด

ภาพสองภาพที่แสดงด้านล่างแสดงให้เห็นถึงการเลื่อนเฟสหรือความแตกต่างในตำแหน่งของความถี่ที่สะท้อนเมื่อเทียบกับความถี่การแผ่รังสีเดิมเมื่อเป้าหมายเข้าใกล้ (ภาพแรกด้านล่าง) และเมื่อเป้าหมายถอยหรือถอยหลัง (แผนภาพที่สองด้านล่าง ).
การวิเคราะห์ความแตกต่างของการกะระยะ


ในบทความถัดไป (กำลังจะมาถึง) เราจะพยายามทำความเข้าใจเกี่ยวกับวิธีใช้เซ็นเซอร์ไมโครเวฟผ่านวงจรที่ใช้งานได้จริง
คู่ของ: วงจรรถเข็นควบคุมระยะไกลโดยไม่ใช้ไมโครคอนโทรลเลอร์ ถัดไป: วิธีสร้างวงจรเตือนความปลอดภัยเรดาร์ไมโครเวฟ GHz