
ถึง หุ่นยนต์เป็นเครื่องจักรกลไฟฟ้า ที่กำกับโดยวงจรหรือโปรแกรมคอมพิวเตอร์หุ่นยนต์ได้แลกเปลี่ยนมนุษย์เพื่อช่วยในการปฏิบัติงานที่ต่อเนื่องและเป็นอันตรายซึ่งมนุษย์เลือกที่จะไม่ทำ ปัจจุบัน หุ่นยนต์แบ่งออกเป็นประเภทต่างๆ ตามคุณสมบัติและประสิทธิภาพเช่นหุ่นยนต์อุตสาหกรรมหุ่นยนต์เชิงพาณิชย์หุ่นยนต์บริการหุ่นยนต์เคลื่อนที่ นี่คือหุ่นยนต์บริการที่ทำงานอย่างต่อเนื่องเพื่อต้อนรับผู้คนด้วยการเคลื่อนไหวของมือที่เป็นตัวแทนของ 'Namaste' ผ่านข้อความเสียงที่บันทึกไว้ โดยทั่วไปเมื่อเราเชิญผู้คนมาที่บ้านงานเลี้ยงงานแต่งงานสำนักงาน ฯลฯ เราจำเป็นต้องจัดให้มีคนทักทายและเชิญพวกเขาที่ทางเข้า หากจำนวนคนน้อยงานก็ง่ายกว่า แต่ถ้าคุณทักทายผู้คนหลายร้อยคนงานนั้นก็ยาก เพื่อเอาชนะปัญหานี้นี่คือโครงการคือหุ่นยนต์ Namaste พร้อมการควบคุมด้วยเสียง

Namaste Robot
Namaste Robot พร้อมระบบสั่งการด้วยเสียง
แนวคิดหลักของ Namaste นี้ โครงการหุ่นยนต์คือการควบคุมเซอร์โวมอเตอร์ต่างๆ ผ่านบอร์ด Arduino หุ่นยนต์นี้จะสแกนคนโดยรอบและหมุนหัวไปรอบ ๆ 180 ° ถ้ามันจำใครก็ได้ที่อยู่ใกล้ ๆ มันก็ขอให้คน ๆ นั้นกับ Namaste ด้วยมือทั้งสองข้าง เป็นวิธีดั้งเดิมในการขอพรผู้คนในอินเดีย การประยุกต์ใช้หุ่นยนต์ เกี่ยวข้องกับห้างสรรพสินค้าสวนสาธารณะสำนักงานเพื่อดึงดูดผู้คน
แผนภาพบล็อกของหุ่นยนต์ Namastae พร้อมการควบคุมด้วยเสียง
รูปต่อไปนี้แสดงถึงแผนภาพบล็อกของหุ่นยนต์ Namaste ที่ควบคุมด้วยเสียง ในหุ่นยนต์ประเภทนี้จะมีการตั้งโปรแกรมคำสั่งเสียง บอร์ดพัฒนาทั้งหมดสามารถเชื่อมต่อกับแหล่งจ่ายไฟทั่วไป คำอธิบายของแต่ละบล็อกมีดังนี้ แหล่งจ่ายไฟ ให้แหล่งจ่ายไฟแก่โมดูลทั้งหมด โมดูลเหล่านี้ต้องการกระแสเป็น mA และแรงดันไฟฟ้าจะเป็น 5V

แผนภาพบล็อกของหุ่นยนต์ Namastae พร้อมการควบคุมด้วยเสียง
บอร์ด Arduino
Arduino เป็นเครื่องมือชนิดหนึ่ง บนพื้นฐานของบอร์ดไมโครคอนโทรลเลอร์ที่ใช้ในการควบคุมและรับรู้โลกทางกายภาพมากกว่าคอมพิวเตอร์เดสก์ท็อป สำหรับการคำนวณทางกายภาพมีแพลตฟอร์มไมโครคอนโทรลเลอร์หลายแบบ คุณสมบัติที่สำคัญของ Arduino คือซอฟต์แวร์โอเพ่นซอร์สและขยายได้ราคาไม่แพงซอฟต์แวร์ Arduino มีให้ใช้งานเป็นเครื่องมือโอเพ่นซอร์สและภาษาสามารถขยายผ่านไลบรารี C ++ ได้

บอร์ด Arduino
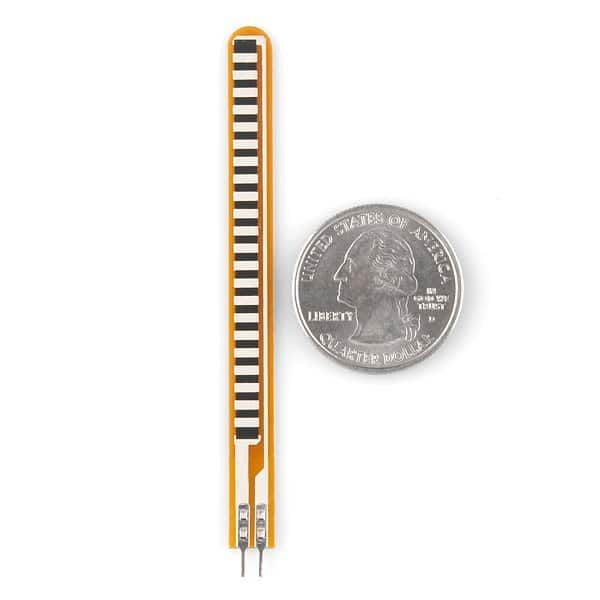
เซ็นเซอร์ Ping
เซ็นเซอร์ ping ใช้ SONAR เพื่อควบคุมระยะห่างของวัตถุในบริเวณใกล้เคียง นี้ ใช้เซ็นเซอร์เป็น ดวงตาของหุ่นยนต์เพื่อตรวจจับสิ่งกีดขวางตัวอย่างเช่นพร็อกซิมิตีเซนเซอร์ ให้ความแม่นยำของช่วงที่ยอดเยี่ยมและการอ่านที่เสถียร การทำงานของเซ็นเซอร์นี้ไม่ได้รับผลกระทบจากวัสดุสีดำหรือแสงแดด ข้อกำหนดของเซ็นเซอร์ ping คือแรงดันไฟฟ้าคือ 5V กระแสไฟฟ้า 15mA มุมเซ็นเซอร์ไม่> = 15 และระยะตรวจจับคือ 2 ซม. ~ 450 ซม.

เซ็นเซอร์ Ping
การเชื่อมต่อของเซ็นเซอร์ ping กับ Arduino แสดงไว้ด้านล่าง มีพินสี่พินสำหรับเชื่อมต่อกับเซ็นเซอร์ ping กับบอร์ด Arduino หมุดทั้งสี่บนบอร์ด Arduino คือ GND, VCC, ECHO และ TRIGGER หมุดบนบอร์ดคือ D0-D13 โดยใน 12 และ 13 พินนั้นเป็นพินอินพุตและเอาต์พุต
ไมโครคอนโทรลเลอร์ Arduino นำเสนอไลบรารีควบคุมเซอร์โวที่ช่วยให้เราเปลี่ยนเซอร์โวได้อย่างง่ายดาย ในโครงการนี้เราใช้เซอร์โว 5 ตัวเพื่อควบคุมการเคลื่อนไหวของหุ่นยนต์ Namaste เช่นศีรษะข้อศอกขวาข้อศอกซ้ายไหล่ขวาและไหล่ซ้าย ที่นี่พินอินพุต / เอาท์พุตดิจิทัล (D5, D6, D9, D10, D1) มีความหมายในบอร์ด Arduino ที่เชื่อมต่อกับเซอร์โวมอเตอร์
IC เล่นเสียง
IC เล่นเสียงนี้เสนอข้อความที่บันทึกไว้ซึ่งเล่นตามอัตราความถี่ที่กำหนดไว้ล่วงหน้า การเล่นจะถูกย้ายไปที่หน่วยขยายเสียง

IC เล่นเสียง
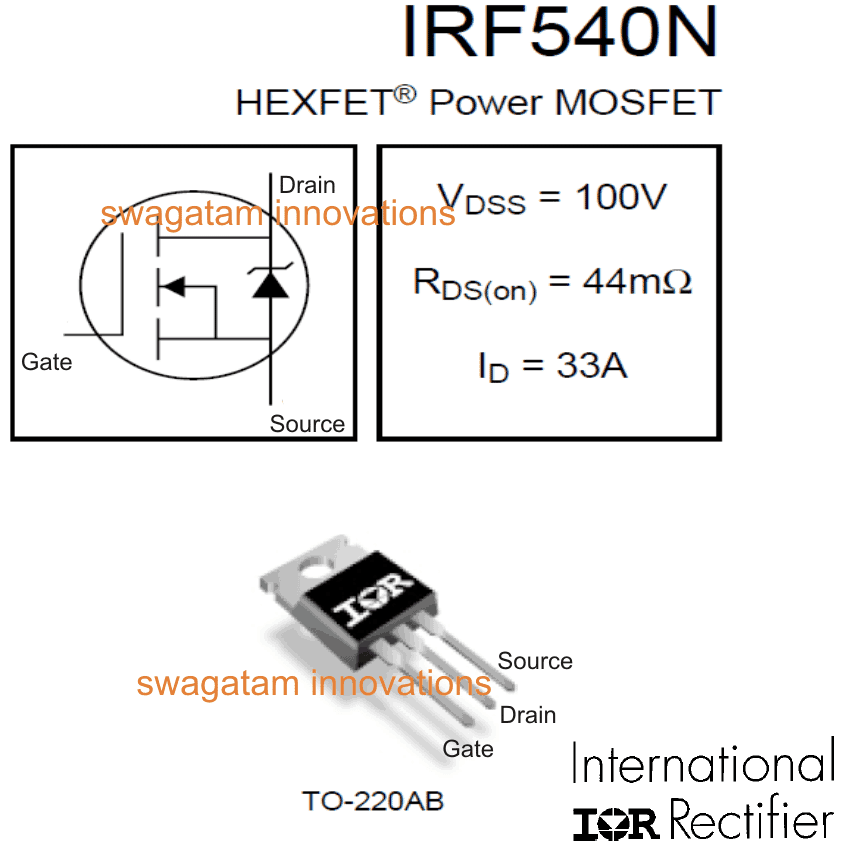
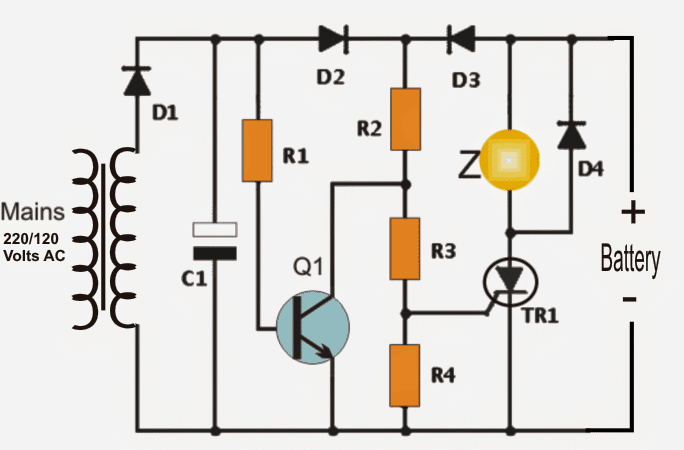
รีเลย์
ถึง รีเลย์เป็นสวิตช์ชนิดหนึ่ง ทำงานด้วยระบบไฟฟ้า การไหลของกระแสผ่านขดลวดของรีเลย์ทำให้เกิดสนามแม่เหล็กซึ่งเชิญคันโยกและเปลี่ยนหน้าสัมผัสสวิตช์

รีเลย์
การควบคุมด้วยเสียงหุ่นยนต์ Namastae กำลังทำงาน
การทำงานของหุ่นยนต์ Namaste สามารถทำได้ทีละขั้นตอนพร้อมกับผลลัพธ์ที่จำลองขึ้น เมื่อหุ่นยนต์ Namaste อยู่ในสถานะแรกแล้ว เซอร์โวมอเตอร์ s ของหุ่นยนต์ 2, 3, 4, 5 อยู่ในสถานะปิดหรือสถานะศูนย์ ส่วนหัวของหุ่นยนต์ Namaste จะสลับจากศูนย์กลางไปขวาซ้ายแล้วกลับไปที่ศูนย์กลางเนื่องจากการหมุนของเซอร์โวมอเตอร์ 1 จาก 0 ° -180 ° การเคลื่อนไหวของหัวหุ่นยนต์ระบุว่าหุ่นยนต์ Namaste กำลังมองหาสิ่งกีดขวาง เมื่อเซ็นเซอร์ ping ตรวจพบสิ่งกีดขวางตำแหน่งส่วนหัวของหุ่นยนต์จะกลับไปที่ศูนย์กลางและเซอร์โวมอเตอร์ 1 ที่มุม 90 °และปิดเครื่อง เปิดใช้งานในสถานะ LOW
เมื่อเซอร์โวมอเตอร์ 1 ปิดลงแล้วมอเตอร์ที่เหลือเช่นเซอร์โว 4 และเซอร์โว 5 จะเปิด สายสัญญาณถูกเรียกที่ไหล่ขวาและซ้ายของหุ่นยนต์ Namaste ตอนนี้มือของหุ่นยนต์สามารถเคลื่อนไหวได้แล้ว เซอร์โวมอเตอร์ที่ไหล่เชื่อมต่อกับพินอินพุตและเอาต์พุตดิจิตอลของบอร์ด Arduino แต่สายสัญญาณหรือหมุดเหล่านี้จะสูงและตำแหน่งของเซอร์โวจะเปลี่ยนเป็น 90 ° ตอนนี้ servo4 และ servo 5 ปิด
ในที่สุดเราก็สามารถสรุปได้ว่าจุดมุ่งหมายหลักของการควบคุมด้วยเสียงนี้ หุ่นยนต์คือการให้บริการ ของการต้อนรับผู้คนอย่างสุภาพโดยการตรวจจับคนที่เดินอยู่ข้างหน้า สามารถใช้ในสถานที่สาธารณะต่างๆเช่นสวนสาธารณะห้างสรรพสินค้าปาร์ตี้ ฯลฯ เราหวังว่าคุณจะเข้าใจแนวคิดนี้ดีขึ้น นอกจากนี้คำถามใด ๆ เกี่ยวกับแนวคิดนี้หรือตาม arduino โครงการหุ่นยนต์ โปรดให้ข้อเสนอแนะที่มีค่าของคุณโดยการแสดงความคิดเห็นในส่วนความคิดเห็นด้านล่าง
เครดิตภาพ:
- บอร์ด Arduino nyacknewsandviews
- เซ็นเซอร์ Ping พารัลแลกซ์
- IC เล่นเสียง Kealab
- รีเลย์ awdirect
- Namaste Robot canstockphoto






{kind=link}
{kind=link}
{kind=link}
{kind=link}