การใช้ PWM เป็นเทคนิคการเปลี่ยน
Pulse Width Modulation (PWM) เป็นเทคนิคที่ใช้กันทั่วไปในการควบคุมไฟฟ้ากระแสตรงไปยังอุปกรณ์ไฟฟ้าโดยใช้สวิตช์ไฟอิเล็กทรอนิกส์ที่ทันสมัย อย่างไรก็ตามมันยังพบว่ามันอยู่ในตัวสับ AC ค่าเฉลี่ยของกระแสที่จ่ายให้กับโหลดจะถูกควบคุมโดยตำแหน่งสวิตช์และระยะเวลาของสถานะ หากระยะเวลาเปิดของสวิตช์นานกว่าเมื่อเทียบกับช่วงเวลาปิดเครื่องโหลดจะได้รับพลังงานที่สูงกว่า ดังนั้นความถี่ในการเปลี่ยน PWM จะต้องเร็วขึ้น
โดยปกติแล้วการเปลี่ยนจะต้องทำหลายครั้งต่อนาทีในเตาไฟฟ้า 120 Hz ในหลอดหรี่ไฟตั้งแต่ไม่กี่กิโลเฮิรตซ์ (kHz) ถึงสิบกิโลเฮิร์ตซ์สำหรับมอเตอร์ขับเคลื่อน การสลับความถี่สำหรับเครื่องขยายเสียงและแหล่งจ่ายไฟของคอมพิวเตอร์มีค่าประมาณ 10 ถึงหลายร้อย kHz อัตราส่วนของเวลา ON ต่อช่วงเวลาของพัลส์เรียกว่ารอบการทำงาน หากรอบการทำงานต่ำแสดงว่ากำลังไฟฟ้าต่ำ
การสูญเสียพลังงานในอุปกรณ์สวิตชิ่งอยู่ในระดับต่ำมากเนื่องจากกระแสไฟฟ้าที่ไหลในสถานะปิดของอุปกรณ์เกือบเล็กน้อยและแรงดันไฟฟ้าตกเล็กน้อยในสถานะปิด การควบคุมแบบดิจิทัลยังใช้เทคนิค PWM นอกจากนี้ยังมีการใช้ PWM ในระบบการสื่อสารบางระบบที่มีการใช้วงจรการทำงานเพื่อถ่ายทอดข้อมูลผ่านช่องทางการสื่อสาร

PWM สามารถใช้เพื่อปรับปริมาณพลังงานทั้งหมดที่ส่งไปยังโหลดโดยไม่เกิดการสูญเสียตามปกติเมื่อการถ่ายโอนพลังงานถูก จำกัด ด้วยวิธีการต้านทาน ข้อเสียคือจังหวะที่กำหนดโดยรอบการทำงานความถี่การสลับและคุณสมบัติของโหลด ด้วยความถี่สวิตชิ่งที่สูงเพียงพอและเมื่อจำเป็นการใช้ตัวกรองอิเล็กทรอนิกส์แบบพาสซีฟเพิ่มเติมจะทำให้พัลส์เทรนเรียบและกู้คืนรูปคลื่นอะนาล็อกโดยเฉลี่ยได้ ระบบควบคุม PWM ความถี่สูงสามารถใช้งานได้ง่ายโดยใช้สวิตช์เซมิคอนดักเตอร์
ดังที่ได้ระบุไว้แล้วข้างต้นแทบจะไม่มีการกระจายพลังงานโดยสวิตช์ในสถานะเปิดหรือปิด อย่างไรก็ตามในระหว่างการเปลี่ยนสถานะระหว่างเปิดและปิดทั้งแรงดันไฟฟ้าและกระแสไฟฟ้าไม่เป็นศูนย์ดังนั้นพลังงานจำนวนมากจึงกระจายไปในสวิตช์ โชคดีที่การเปลี่ยนสถานะระหว่างเปิดเต็มที่และปิดเต็มที่นั้นค่อนข้างรวดเร็ว (โดยทั่วไปน้อยกว่า 100 นาโนวินาที) เมื่อเทียบกับเวลาเปิดหรือปิดโดยทั่วไปดังนั้นการกระจายพลังงานโดยเฉลี่ยจึงค่อนข้างต่ำเมื่อเทียบกับพลังงานที่ส่งแม้ว่าความถี่สวิตชิ่งสูง ใช้
การใช้ PWM เพื่อส่งพลังงาน DC ไปยังโหลด
กระบวนการทางอุตสาหกรรมส่วนใหญ่จำเป็นต้องดำเนินการกับพารามิเตอร์บางอย่างที่เกี่ยวข้องกับความเร็วของไดรฟ์ ระบบขับเคลื่อนไฟฟ้าที่ใช้ในงานอุตสาหกรรมจำนวนมากต้องการประสิทธิภาพที่สูงขึ้นความน่าเชื่อถือความเร็วที่แปรผันเนื่องจากง่ายต่อการควบคุม การควบคุมความเร็วของมอเตอร์กระแสตรง มีความสำคัญในการใช้งานที่ความแม่นยำและการป้องกันเป็นสิ่งสำคัญ วัตถุประสงค์ของตัวควบคุมความเร็วมอเตอร์คือการรับสัญญาณที่แสดงถึงความเร็วที่ต้องการและเพื่อขับเคลื่อนมอเตอร์ด้วยความเร็วนั้น
การมอดูเลตความกว้างพัลส์ (PWM) ซึ่งใช้กับการควบคุมมอเตอร์เป็นวิธีการส่งพลังงานผ่านพัลส์ที่ต่อเนื่องกันแทนที่จะเป็นสัญญาณที่แปรผันอย่างต่อเนื่อง (อนาล็อก) ด้วยการเพิ่มหรือลดความกว้างของพัลส์คอนโทรลเลอร์จะควบคุมการไหลของพลังงานไปยังเพลามอเตอร์ ตัวเหนี่ยวนำของมอเตอร์ทำหน้าที่เหมือนตัวกรองเก็บพลังงานระหว่างรอบ“ เปิด” ในขณะที่ปล่อยออกมาในอัตราที่สอดคล้องกับสัญญาณอินพุตหรือสัญญาณอ้างอิง กล่าวอีกนัยหนึ่งพลังงานจะไหลเข้าสู่โหลดไม่มากนักที่ความถี่ในการเปลี่ยน แต่เป็นความถี่อ้างอิง
วงจรนี้ใช้เพื่อควบคุมความเร็วของ มอเตอร์กระแสตรง โดยใช้เทคนิค PWM ซีรีส์ตัวควบคุมมอเตอร์กระแสตรงความเร็วตัวแปร 12V ใช้ IC ตัวจับเวลา 555 เป็นเครื่องกำเนิดพัลส์ PWM เพื่อควบคุมความเร็วมอเตอร์ DC12 โวลต์ IC 555 คือ Timer Chip ที่นิยมใช้ในการสร้างวงจรจับเวลา ได้รับการแนะนำในปีพ. ศ. 2515 โดย Signetics เรียกว่าเป็น 555 เนื่องจากมีตัวต้านทาน 5 K สามตัวอยู่ภายใน IC ประกอบด้วยตัวเปรียบเทียบสองตัวคือโซ่ตัวต้านทาน Flip Flop และสเตจเอาท์พุท มันทำงานใน 3 โหมดพื้นฐาน - Astable, Monostable (โดยที่มันทำหน้าที่เป็นเครื่องกำเนิดพัลส์ช็อตเดียวและโหมด Bistable นั่นคือเมื่อมันถูกเรียกเอาท์พุทจะสูงในช่วงเวลาหนึ่งตามค่าของตัวต้านทานเวลาและตัวเก็บประจุใน โหมด Astable (AMV) IC จะทำงานเป็นมัลติไวเบรเตอร์ที่ทำงานได้ฟรีเอาต์พุตจะเปลี่ยนสูงและต่ำอย่างต่อเนื่องเพื่อให้เอาต์พุตที่เร้าใจเป็นออสซิลเลเตอร์ในโหมด Bistable หรือที่เรียกว่า Schmitt trigger IC จะทำงานเป็น Flip-Flop ที่มีความสูง หรือเอาต์พุตต่ำในแต่ละทริกเกอร์และรีเซ็ต

ในวงจรนี้ใช้ IRF540 MOSFET นี่คือ MOSFET การปรับปรุง N-Channel เป็น MOSFET พลังงานขั้นสูงที่ออกแบบทดสอบและรับประกันว่าสามารถทนต่อระดับพลังงานที่ระบุในโหมดการทำงานของหิมะถล่ม MOSFET กำลังนี้ได้รับการออกแบบมาสำหรับแอปพลิเคชันต่างๆเช่นสวิตชิ่งเรกูเลเตอร์ตัวแปลงสวิตชิ่งไดรเวอร์มอเตอร์ไดรเวอร์รีเลย์และไดรเวอร์สำหรับทรานซิสเตอร์สวิตชิ่งสองขั้วกำลังสูงที่ต้องการความเร็วสูงและกำลังขับเกตต่ำ ประเภทเหล่านี้สามารถทำงานได้โดยตรงจากวงจรรวม แรงดันไฟฟ้าทำงานของวงจรนี้สามารถปรับได้ตามความต้องการของมอเตอร์กระแสตรงที่ขับเคลื่อนด้วย วงจรนี้สามารถทำงานได้ตั้งแต่ 5-18VDC
เหนือวงจรเช่น ควบคุมความเร็วมอเตอร์ DC โดย PWM เทคนิคจะแตกต่างกันไปตามรอบการทำงานซึ่งจะควบคุมความเร็วของมอเตอร์ IC 555 เชื่อมต่ออยู่ในโหมด Astable โดยไม่ต้องใช้เครื่องสั่นหลายตัว วงจรประกอบด้วยการจัดเรียงโพเทนชิออมิเตอร์และไดโอดสองตัวซึ่งใช้เพื่อเปลี่ยนรอบการทำงานและรักษาความถี่ให้คงที่ เนื่องจากความต้านทานของตัวต้านทานตัวแปรหรือโพเทนชิออมิเตอร์มีความหลากหลายรอบการทำงานของพัลส์ที่ใช้กับ MOSFET จะแตกต่างกันไปและตามกระแสไฟ DC ที่ไปยังมอเตอร์จึงแตกต่างกันไปและความเร็วจะเพิ่มขึ้นเมื่อรอบการทำงานเพิ่มขึ้น
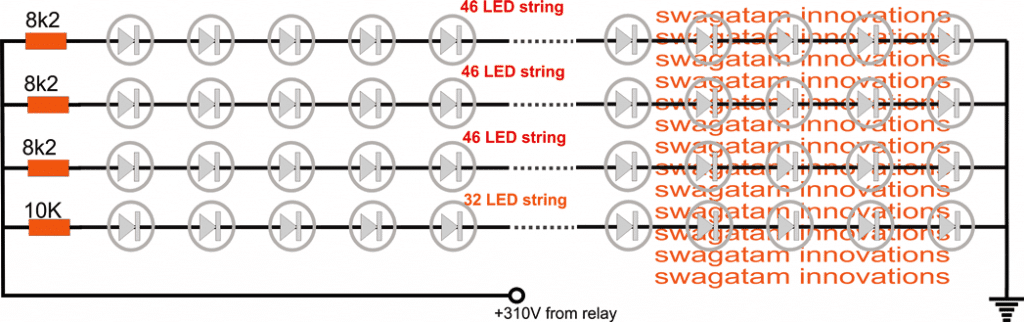
การใช้ PWM เพื่อจ่ายไฟ AC เพื่อโหลด
สวิตช์เซมิคอนดักเตอร์สมัยใหม่เช่น MOSFETs หรือ Insulated-gate bipolar transistors (IGBTs) เป็นส่วนประกอบที่ค่อนข้างเหมาะ จึงสามารถสร้างตัวควบคุมประสิทธิภาพสูงได้ โดยทั่วไปแล้วตัวแปลงความถี่ที่ใช้ควบคุมมอเตอร์ AC จะมีประสิทธิภาพดีกว่า 98% แหล่งจ่ายไฟแบบสวิตชิ่งมีประสิทธิภาพต่ำลงเนื่องจากระดับแรงดันไฟฟ้าขาออกต่ำ (มักจะต้องใช้ไมโครโปรเซสเซอร์น้อยกว่า 2 V) แต่ยังคงมีประสิทธิภาพมากกว่า 70-80%

การควบคุม AC ประเภทนี้เป็นพลังงานที่เรียกว่าวิธีมุมยิงล่าช้า มีราคาถูกกว่าและสร้างสัญญาณรบกวนทางไฟฟ้าและฮาร์มอนิกส์ได้มากเมื่อเทียบกับการควบคุม PWM จริงที่พัฒนาสัญญาณรบกวนเล็กน้อย
ในการใช้งานหลายประเภทเช่นการทำความร้อนในอุตสาหกรรมการควบคุมแสงสว่างมอเตอร์เหนี่ยวนำสตาร์ทแบบนุ่มนวลและตัวควบคุมความเร็วสำหรับพัดลมและปั๊มต้องใช้แรงดันไฟฟ้ากระแสสลับผันแปรจากแหล่งจ่ายไฟ AC คงที่ การควบคุมมุมเฟสของตัวควบคุมถูกนำมาใช้กันอย่างแพร่หลายสำหรับข้อกำหนดเหล่านี้ มีข้อดีบางประการเช่นความเรียบง่ายและความสามารถในการควบคุมพลังงานจำนวนมากอย่างประหยัด อย่างไรก็ตามมุมยิงที่ล่าช้าทำให้เกิดความไม่ต่อเนื่องและฮาร์มอนิกที่มีอยู่มากมายในกระแสโหลดและตัวประกอบกำลังที่ล้าหลังจะเกิดขึ้นที่ด้าน AC เมื่อมุมยิงเพิ่มขึ้น
ปัญหาเหล่านี้สามารถแก้ไขได้โดยใช้ PWM AC chopper เครื่องบดสับ PWM AC นี้มีข้อดีหลายประการเช่นกระแสอินพุตไซน์ที่มีตัวประกอบกำลังใกล้เคียงกัน อย่างไรก็ตามเพื่อลดขนาดตัวกรองและปรับปรุงคุณภาพของตัวควบคุมเอาต์พุตควรเพิ่มความถี่ในการเปลี่ยน ทำให้เกิดการสูญเสียการสลับสูง ปัญหาอีกประการหนึ่งคือการเปลี่ยนระหว่างสวิตช์ถ่ายโอน S1 กับสวิตช์อิสระ S2 จะทำให้กระแสไฟฟ้าพุ่งขึ้นหากสวิตช์ทั้งสองเปิดอยู่ในเวลาเดียวกัน (ไฟฟ้าลัดวงจร) และแรงดันไฟฟ้าจะขัดขวางหากสวิตช์ทั้งสองปิดอยู่ (ไม่มีเส้นทางอิสระ) เพื่อหลีกเลี่ยงปัญหาเหล่านี้จึงใช้ RC snubber อย่างไรก็ตามสิ่งนี้จะเพิ่มการสูญเสียพลังงานในวงจรและเป็นเรื่องยากราคาแพงขนาดใหญ่และไม่มีประสิทธิภาพสำหรับการใช้งานที่ใช้พลังงานสูง เสนอสับ AC ที่มีการสลับแรงดันไฟฟ้าปัจจุบันเป็นศูนย์ (ZCS-ZVS) ตัวควบคุมแรงดันไฟฟ้าขาออกจำเป็นต้องเปลี่ยนเวลาปิดเครื่องที่ควบคุมโดยสัญญาณ PWM ดังนั้นจึงจำเป็นต้องใช้การควบคุมความถี่เพื่อให้เกิดการสลับแบบนุ่มนวลและระบบควบคุมทั่วไปใช้เทคนิค PWM ที่ทำให้เกิดการสลับเวลา เทคนิคนี้มีข้อดีเช่นการควบคุมอย่างง่ายด้วยการมอดูเลต sigma-delta และยังคงอินพุตปัจจุบัน คุณสมบัติของการกำหนดค่าวงจรที่เสนอและรูปแบบการสับ PWM แสดงไว้ด้านล่าง


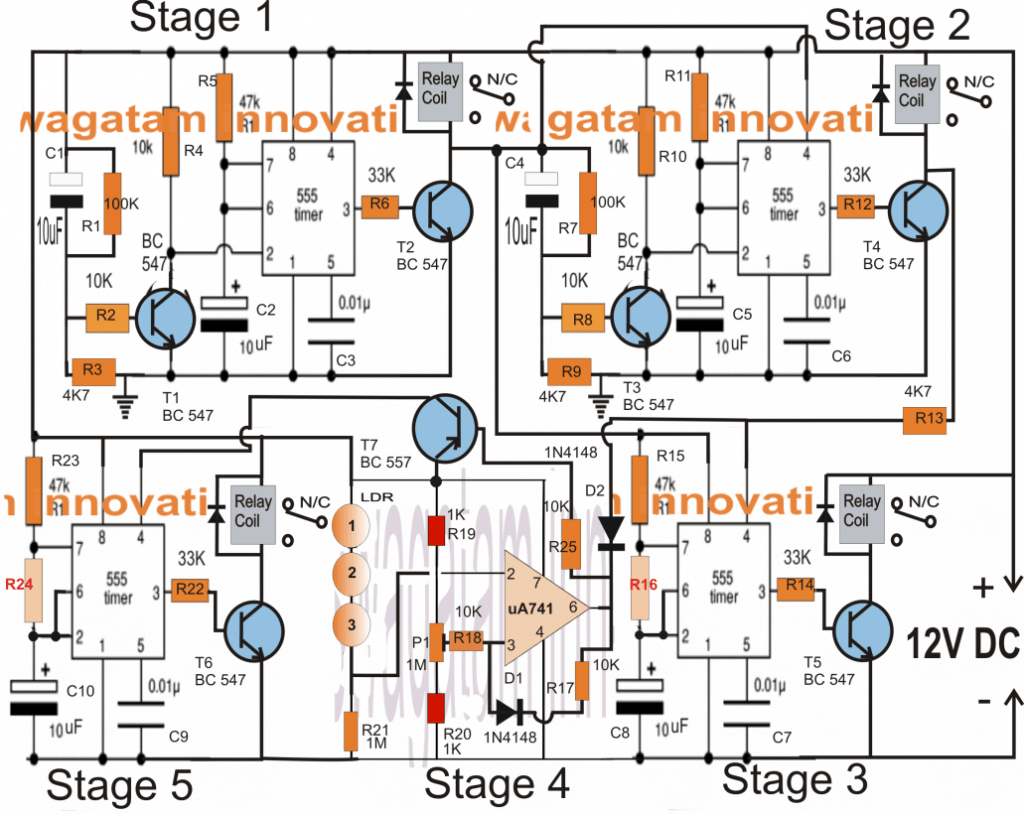
![วงจรตรวจจับไอออน [ตัวตรวจจับการคายประจุไฟฟ้าสถิต]](https://electronics.jf-parede.pt/img/sensors-and-detectors/09/ion-detector-circuit-static-discharge-detector-1.jpg)