แม้ว่าวงจรควบคุมระยะไกลแบบ quadcopter สามารถจัดหาได้ง่ายมากจากตลาดหรือจากร้านค้าออนไลน์ก็ตาม แต่ก็ไม่เคยอนุญาตให้นักเล่นอิเล็กทรอนิกส์ตัวยงเรียนรู้ว่าฟังก์ชั่นเหล่านี้จริงหรือไม่และสามารถสร้างที่บ้านได้หรือไม่?
ในบทความนี้เราจะพยายามสร้างไฟล์ วงจรควบคุมระยะไกล quadcopter อย่างง่าย ใช้ส่วนประกอบแยกและใช้โมดูลรีโมทคอนโทรล RF และไม่เกี่ยวข้องกับวงจรที่ใช้ MCU ที่ซับซ้อน
คำแนะนำทีละขั้นตอนจะทำให้ผู้ที่สนใจงานอดิเรกเข้าใจว่าสามารถควบคุม quadcopter ได้อย่างไรโดยใช้แนวคิด PWM
เราได้เรียนรู้แล้ว พื้นฐานของ quadcopter ตอนนี้เรามาตรวจสอบส่วนการควบคุมระยะไกลซึ่งในที่สุดจะช่วยในการบินหน่วยจากระยะไกล
จำเป็นต้องมีโมดูลพื้นฐาน
ส่วนผสมหลักที่อาจจำเป็นสำหรับโครงการได้รับดังต่อไปนี้:
โดยพื้นฐานแล้วเราจะต้องมี 3 ขั้นตอนวงจรต่อไปนี้:
1) รีโมทคอนโทรล RF 4 ทาง Tx, โมดูล Rx - 1 ชุด
2) วงจรกำเนิด PWM ที่ใช้ IC 555 - 4nos
3) วงจรควบคุมมอเตอร์ BLDC - 4nos
เนื่องจากเป็นเวอร์ชันโฮมเมดเราจึงสามารถคาดหวังได้ถึงความไร้ประสิทธิภาพในการออกแบบที่นำเสนอเช่นการไม่มีจอยสติ๊กสำหรับตัวควบคุมซึ่งถูกแทนที่ด้วยหม้อหรือโพเทนชิโอมิเตอร์อย่างไรก็ตามความสามารถในการทำงานของระบบสามารถคาดหวังได้ว่าจะเทียบเท่ากับ หน่วยงานมืออาชีพ
หน่วยส่งสัญญาณ PWM แบบใช้มือถือโดยทั่วไปจะประกอบด้วยโมดูลระยะไกล Tx ที่รวมกับวงจรควบคุม PWM แบบแยก 4 วงจรในขณะที่ quadcopter จะต้องล้อมรอบด้วยวงจร 1 Rx ที่รวมกับวงจรขับ BLDC แบบแยก 4 วงจร
เริ่มต้นด้วยวงจรมอเตอร์ควอดคอปเตอร์และดูว่าต้องกำหนดค่าและต่อตัวควบคุมมอเตอร์ BLDC ด้วยวงจร Rx อย่างไร
วงจรรับสัญญาณ Quadcopter PWM
ในโพสต์ก่อนหน้านี้เราได้เรียนรู้ว่าตัวควบคุมมอเตอร์ BLDC อเนกประสงค์สามารถสร้างขึ้นโดยใช้ชิปตัวเดียวได้อย่างไรอย่างไรก็ตามการออกแบบนี้ไม่ได้ออกแบบมาเพื่อใช้งานมอเตอร์ที่ค่อนข้างหนักกว่าของ quadcopter ดังนั้นจึงอาจไม่เหมาะกับการใช้งานในปัจจุบัน
ตัวเลือก 'พี่ใหญ่' สำหรับวงจรข้างต้นนั้นโชคดีและเหมาะอย่างยิ่งสำหรับการขับเคลื่อนมอเตอร์ควอดคอปเตอร์ ขอบคุณ TEXAS INSTRUMENTS ที่มอบโมดูลวงจรที่ระบุแอปพลิเคชันชิปเดียวที่ยอดเยี่ยมให้กับเรา
หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับ IC ไดรเวอร์ BLDC กระแสสูงนี้คุณสามารถอ้างถึงแผ่นข้อมูล pdf ต่อไปนี้ของสิ่งเดียวกัน
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
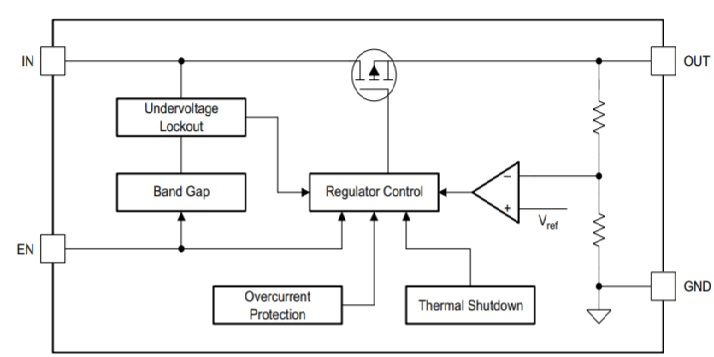
การตั้งค่าด้านล่างแสดงแผนผังวงจรทั้งหมดของตัวควบคุมไดรเวอร์มอเตอร์ควอดคอปเตอร์โดยใช้ไอซี DRV11873 ซึ่งเป็นวงจรมอเตอร์ BLDC กระแสต่ำที่มีอยู่ในตัวซึ่งประกอบด้วยคุณสมบัติการป้องกันที่จำเป็นทั้งหมดเช่นการป้องกันการโอเวอร์โหลดการป้องกันความร้อนเป็นต้นโมดูลนี้โดยทั่วไปจะสร้าง ESC สำหรับหน่วย quadcopter ปัจจุบันของเรา
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการออกแบบและรายละเอียด PCB นี้คุณสามารถดูเอกสารต้นฉบับด้านล่าง:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

มันทำงานอย่างไร
FS และ FG pinouts ของ IC มีไว้สำหรับปรับปรุง IC ด้วยการควบคุมเพิ่มเติมผ่านวงจรภายนอกเนื่องจากเราไม่ได้ใช้คุณสมบัติเหล่านี้ในการออกแบบของเราพินเหล่านี้อาจถูกเก็บไว้โดยไม่ได้ใช้งานและสิ้นสุดลงที่เส้นบวกผ่านตัวต้านทาน 100K
RD pinout ของ IC จะกำหนดทิศทางการหมุนของมอเตอร์ การเชื่อมต่อพินนี้กับ Vcc ผ่านตัวต้านทาน 100K ทำให้มอเตอร์หมุนทวนเข็มนาฬิกาได้ในขณะที่ปล่อยไว้โดยไม่ได้เชื่อมต่อจะตรงกันข้ามและทำให้มอเตอร์หมุนไปในทิศทางตามเข็มนาฬิกา
Pin # 16 คืออินพุต PWM ที่ใช้สำหรับการฉีดอินพุต PWM จากแหล่งภายนอกการเปลี่ยนแปลงรอบการทำงานของ PWM จะเปลี่ยนความเร็วของมอเตอร์ตามลำดับ
FR, CS pinouts ไม่เกี่ยวข้องกับความต้องการดังนั้นจึงสามารถปล่อยทิ้งไว้โดยไม่ได้ใช้ดังที่แสดงในแผนภาพและสิ้นสุดลงที่เส้นบวกผ่านตัวต้านทาน 100K
พิน U, V, W เป็นเอาต์พุตของมอเตอร์ที่จำเป็นต้องเชื่อมต่อกับมอเตอร์ 3 เฟสแบบ quadcopter BLDC ตามลำดับ
COM pinout ใช้สำหรับเชื่อมต่อสายไฟทั่วไปของมอเตอร์ 3 เฟสหากมอเตอร์ของคุณไม่มีสายไฟทั่วไปคุณสามารถจำลองได้โดยเชื่อมต่อตัวต้านทาน 2k2 3 ตัวเข้ากับพิน U, W, W จากนั้นเชื่อมต่อร่วมกัน ลงท้ายด้วยขา COM ของ IC
แผนผังยังแสดง IC 555 ที่กำหนดค่าในโหมดวงจร PWM astable สิ่งนี้กลายเป็นส่วนหนึ่งของโมดูลวงจรและสามารถมองเห็นเอาต์พุต PWM จากพิน # 7 โดยเชื่อมต่อกับอินพุต PWM ของวงจร DRV IC เพื่อเริ่มต้นมอเตอร์ 4 ตัวด้วยความเร็วพื้นฐานคงที่และเพื่อให้มอเตอร์มีการเคลื่อนที่อย่างต่อเนื่อง ความเร็วในจุดที่กำหนด
นี่เป็นการสรุปวงจร ELC หลักหรือวงจรขับ BLDC สำหรับการออกแบบ Quadcopter
เราจะต้องมีโมดูลดังกล่าวสี่โมดูลสำหรับมอเตอร์สี่ตัวในการออกแบบ Quadcopter ของเรา
หมายความว่า DRV IC 4 ตัวดังกล่าวพร้อมกับ IC 555 PWM stage จะต้องเชื่อมโยงกับมอเตอร์ 4 ตัวของ quadcopter
โมดูลเหล่านี้จะช่วยให้มั่นใจได้ว่าโดยปกติมอเตอร์ทั้ง 4 ตัวจะถูกตั้งค่าด้วยความเร็วที่กำหนดไว้ล่วงหน้าโดยใช้สัญญาณ PWM คงที่และเหมือนกันกับ IC คอนโทรลเลอร์ DRV ที่เกี่ยวข้องแต่ละตัว
ตอนนี้เรามาเรียนรู้กันว่า PWM สามารถเปลี่ยนแปลงได้อย่างไรผ่านรีโมทคอนโทรลเพื่อปรับความเร็วของมอเตอร์แต่ละตัวโดยใช้เครื่องควบคุมระยะไกลแบบ 4 ช่องสัญญาณธรรมดา
โมดูลตัวรับสัญญาณ RF (ตัวถอดรหัส PWM)

วงจรด้านบนแสดงวงจร RF ระยะไกลของตัวรับสัญญาณซึ่งควรจะติดตั้งอยู่ภายในควอดคอปเตอร์เพื่อรับข้อมูล PWM ไร้สายภายนอกจากโทรศัพท์มือถือเครื่องส่งสัญญาณระยะไกลของผู้ใช้จากนั้นประมวลผลสัญญาณอย่างเหมาะสมเพื่อป้อนโมดูลคอนโทรลเลอร์ DRV ที่ให้มาตามที่อธิบายไว้ใน ส่วนก่อนหน้า
เอาต์พุต 4 ตัวที่มีชื่อว่า PWM # 1 … .PWM # 4 ต้องเชื่อมต่อกับพิน PWM # 15 ของ DRV IC ตามที่ระบุในแผนภาพก่อนหน้า
PWM pinouts เหล่านี้จากหน่วยรับ RF จะเปิดใช้งานเมื่อใดก็ตามที่ผู้ใช้กดปุ่มที่เกี่ยวข้องในเครื่องส่งสัญญาณ
วิธีที่เครื่องส่งสัญญาณ RF ต้องใช้สาย (PWM Encoder)
ในส่วนข้างต้นเราได้กล่าวถึง Rx หรือวงจรรับสัญญาณระยะไกลและวิธีการที่ 4 เอาท์พุทที่ต้องเชื่อมต่อกับโมดูลไดรเวอร์ ESC ของมอเตอร์ Quadcopter
ที่นี่เรามาดูกันว่าต้องสร้างเครื่องส่งสัญญาณ RF อย่างง่ายและต่อสายด้วยวงจร PWM สำหรับการส่งข้อมูล PWM แบบไร้สายไปยังหน่วยรับสัญญาณ Quadcopter เพื่อให้ควบคุมความเร็วของมอเตอร์แต่ละตัวได้เพียงแค่กดปุ่มซึ่งในที่สุดก็ทำให้เกิด quadcopter เพื่อเปลี่ยนทิศทางหรือความเร็วตามความต้องการของผู้ใช้

วงจรที่แสดงด้านบนแสดงรายละเอียดการเดินสายของโมดูลเครื่องส่งสัญญาณ แนวคิดนี้ดูค่อนข้างง่ายวงจรเครื่องส่งสัญญาณหลักถูกสร้างขึ้นโดยชิป TSW434 ซึ่งส่งสัญญาณ PWM ที่เข้ารหัสไปสู่ชั้นบรรยากาศและ HT12E ซึ่งทำหน้าที่ป้อนสัญญาณที่เข้ารหัสไปยังชิป TSW
สัญญาณ PWM ถูกสร้างขึ้นโดยวงจร IC 555 4 ขั้นตอนที่แยกจากกันซึ่งอาจเหมือนกันกับที่ได้กล่าวไว้ก่อนหน้านี้ในโมดูลคอนโทรลเลอร์ DRV
เนื้อหา PWM ของ IC 4 ตัวสามารถถูกยกเลิกไปยังพินที่เกี่ยวข้องของตัวเข้ารหัส IC HT12E ผ่านปุ่มกดแยก 4 ปุ่มที่ระบุเป็น SW1 ---- SW4
แต่ละปุ่มเหล่านี้จะสอดคล้องและสลับพินเอาต์ที่เหมือนกันของโมดูลตัวรับซึ่งเราได้กล่าวถึงก่อนหน้านี้และระบุเป็น PWM # 1, PWM # 2 … ..PWM # 4
ความหมายการกด SW1 อาจทำให้เอาต์พุต PWM # 1 ของชุดรับสัญญาณทำงานอยู่และสิ่งนี้จะเริ่มป้อนสัญญาณ PWM ที่ถอดรหัสที่ได้รับจากเครื่องส่งไปยังโมดูล DRV ที่เกี่ยวข้องและจะทำให้มอเตอร์ที่เกี่ยวข้องเปลี่ยนความเร็วตามนั้น
ในทำนองเดียวกันการกด SW2,3,4 สามารถใช้เพื่อส่งผลต่อความเร็วของมอเตอร์ควอดคอปเตอร์อีก 3 ตัวตามที่ผู้ใช้ต้องการ
วงจร IC 555 PWM
วงจร PWM 4 วงจรที่แสดงในเครื่องส่งสัญญาณ RF ด้านบนสามารถสร้างขึ้นได้โดยอ้างอิงจากแผนภาพต่อไปนี้ซึ่งคล้ายกับวงจร ESC ของคอนโทรลเลอร์ DRV ของเรา

โปรดจำไว้ว่าหม้อ 5K อาจอยู่ในรูปแบบของหม้อทั่วไปและหม้อนี้สามารถใช้ร่วมกับปุ่มสำหรับเลือกความเร็วที่แตกต่างกันบนมอเตอร์ที่เกี่ยวข้องได้
ความหมายโดยการกดปุ่มที่เลือกค้างไว้และเลื่อน 5KPWMpot ที่เกี่ยวข้องไปพร้อม ๆ กันอาจทำให้ quadcopter เพิ่มหรือลดความเร็วในทิศทางที่ต้องการได้
อีกวิธีหนึ่งอาจตั้งค่า PWM ในระดับที่สูงกว่าหรือต่ำกว่าจากนั้นกดปุ่มที่เกี่ยวข้องเพื่อเปิดใช้งานมอเตอร์ควอดคอปเตอร์ที่เกี่ยวข้องเพื่อให้ได้ความเร็วที่ต้องการตามการตั้งค่า PWM
ข้อมูลจำเพาะมอเตอร์ Quadcopter
วงจรควบคุมระยะไกล Qiadcopter ที่อธิบายข้างต้นมีไว้เพื่อใช้เพื่อการแสดงผลเท่านั้นและไม่สามารถใช้เพื่อยกโหลดหรือกล้องได้ หมายความว่ามอเตอร์ที่ใช้ในการออกแบบควรเป็นประเภทกระแสไฟฟ้าต่ำ
DRV11873 IC ได้รับการออกแบบมาเพื่อใช้งานมอเตอร์ที่มีพิกัด 15V, 1.5 แอมป์หรือมอเตอร์ประมาณ 20 วัตต์ ... ดังนั้นจึงสามารถใช้มอเตอร์ BLDC 3 เฟสที่มีพิกัด 15 ถึง 30 วัตต์ได้ตามวัตถุประสงค์
แบตเตอรี่สำหรับการออกแบบ Quadcopter นี้สามารถเป็นแบตเตอรี่ลิเธียมไอออนขนาด 12v Lipo pr ที่สามารถจ่ายกระแสไฟสูงสุด 15V ที่กระแสไฟฟ้าต่อเนื่อง 1.5 แอมป์
รายละเอียดสเปค
1306N Brushless Outrunner มอเตอร์ DC ขนาดเล็ก
ประเภท: ไมโครมอเตอร์
การก่อสร้าง: แม่เหล็กถาวร
การเปลี่ยน: Brushless
ความเร็ว (RPM): 2200rpm / v
อย่างต่อเนื่องในปัจจุบัน (A): 1.5 ~ 2.6A
แรงดันไฟฟ้า (V): 7.4 ~ 11.1V
มอเตอร์ dc ขนาดเล็ก: AX-1306N
น้ำหนัก: 8g
เส้นผ่านศูนย์กลางของเพลา: 1.5 มม
แบตเตอรี่ LI-PO: 2-3 วินาที
กระแสไฟทำงาน: 1.5 ~ 2.6A
ประสิทธิภาพสูงสุด: 67%

คู่ของ: วงจรขับมอเตอร์ BLDC ไร้เซ็นเซอร์ ถัดไป: วงจรควบคุมฮีตเตอร์โดยใช้ปุ่มกด