โพสต์นี้อธิบายถึงวิธีการสร้างรถเข็นควบคุมระยะไกลราคาถูก แต่ทรงพลังซึ่งสามารถเคลื่อนย้ายไปทางซ้ายขวาไปข้างหน้าและย้อนกลับได้ตามที่ผู้ใช้ต้องการโดยใช้โทรศัพท์มือถือระยะไกลที่กำหนด ความคิดไม่ได้อาศัยวงจรไมโครคอนโทรลเลอร์
ในโพสต์ก่อนหน้าของฉันฉันได้พูดคุยเกี่ยวกับไฟล์ วงจรรถของเล่นควบคุมระยะไกลอย่างง่าย แนวคิดปัจจุบันของรถเข็นควบคุมระยะไกลได้รับแรงบันดาลใจจากแนวคิดเดียวกัน แต่มีจุดมุ่งหมายเพื่อใช้ในการบรรทุกของที่น่ากลัวและหนักกว่ามาก
รถเข็นควบคุมระยะไกลสำหรับร้านค้าปลีก
การออกแบบนี้อาจเหมาะเป็นพิเศษและใช้ได้กับห้างสรรพสินค้าหรือร้านค้าปลีกซึ่งอาจใช้เป็นยานพาหนะขนาดเล็กสำหรับขนส่งวัสดุภายในพื้นที่หรือสถานที่ตั้งโดยใช้การกดเพียงไม่กี่ครั้งของหน่วย Tx ระยะไกล
ขั้นตอนแรกในการสร้างรถเข็นควบคุมระยะไกลที่นำเสนอคือการจัดหาชุดโมดูล RF Rx / Tx มาตรฐานจากตัวแทนจำหน่ายอิเล็กทรอนิกส์ในพื้นที่ของคุณหรือจากร้านค้าออนไลน์ใด ๆ ฉันขอแนะนำให้ซื้อจากร้านค้าออนไลน์เพราะจะง่ายและสะดวกกว่ามาก แม้ว่าจะแพงกว่า
หน่วยที่จัดหาจะมีลักษณะดังที่แสดงด้านล่าง:
ใช้โมดูล 433MHz Tx, Rx

หน่วยสีน้ำตาลด้านซ้ายคือ Tx หรือชุดเครื่องส่งสัญญาณในขณะที่วงจรที่อยู่ติดกันกว้างคือ Rx หรือหน่วยรับสัญญาณ
หน่วย Tx สามารถมองเห็นได้ด้วยปุ่มสีแดง 4 ปุ่มที่มีเครื่องหมาย A, B, C, D และบอร์ด Rx อาจมีรีเลย์ 4 ตัว (กล่องสีดำ)
ปุ่มสี่ปุ่มตามลำดับของโมดูล Tx เชื่อมต่อแบบไร้สายเพื่อใช้งานรีเลย์ที่เกี่ยวข้องทั้งสี่ตัวของโมดูล Rx
คุณสามารถเห็นขั้วต่อที่ยึดอยู่รอบ ๆ ขอบของบอร์ด (สีเขียว) ตัวเชื่อมต่อเหล่านี้จะถูกยกเลิกอย่างเหมาะสมด้วยอินพุต (+) (-) จ่ายสำหรับบอร์ด Rx และรวมถึงหน้าสัมผัสรีเลย์สำหรับรีเลย์ทั้ง 4 ตัว
รีเลย์อย่างที่เราทราบกันดีว่าประกอบด้วยหน้าสัมผัสพื้นฐาน 5 หน้าและพินเอาต์ ได้แก่ หมุด 2 ตัวสำหรับขดลวดตัวหนึ่งสำหรับเสาและอีกอันสำหรับ N / C และ N / O
เนื่องจากมีรีเลย์ 4 ตัวในหน่วย Rx คุณจะสามารถค้นหาเอาต์พุต 5 x 4 = 20 ที่เกี่ยวข้องกับจุดเชื่อมต่อที่เกี่ยวข้อง
อาจเป็นงานที่น่าเบื่อในการแยกการติดตามการยุติรีเลย์เหล่านี้บนตัวเชื่อมต่อดังนั้นฉันขอแนะนำให้บัดกรีสายไฟที่พินเอาต์ของรีเลย์โดยตรงเพื่อช่วยตัวคุณเองจากงานข้างต้นความพยายามนี้จะต้องใช้ในภายหลังในขณะที่เราเชื่อมต่อหน่วยกับ วงจรควบคุมรถเข็น
การสร้างวงจรควบคุมรีเลย์สำหรับรถเข็น
สำหรับสิ่งนี้คุณจะต้องใช้รีเลย์และไดโอดจำนวนหนึ่ง รีเลย์ควรได้รับการจัดอันดับอย่างถูกต้องเพื่อจัดการกับมอเตอร์ล้อกำลังสูงของรถเข็น ฉันแนะนำให้ใช้ OEN ทำให้รีเลย์สำหรับสิ่งนี้ดังที่แสดงในภาพต่อไปนี้:

ไดโอดที่จะต้องใช้ในวงจรขับรีเลย์อาจเป็นไดโอด 1N4007 มาตรฐานของเรา
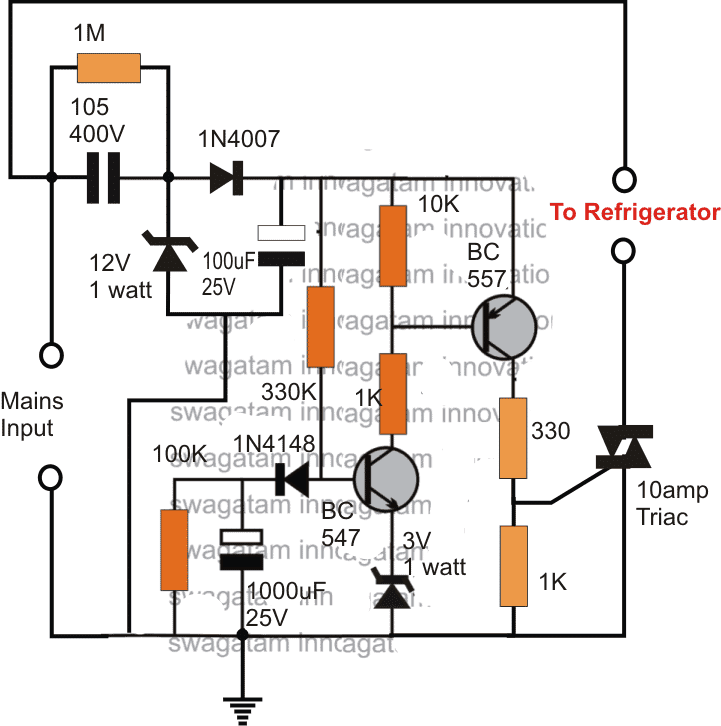
รายละเอียดวงจรสำหรับสิ่งเดียวกันอาจเห็นได้ในแผนภาพต่อไปนี้:
รายละเอียดการเดินสายรีเลย์และแผนผัง


วงจรรถเข็นระยะไกลทำงานอย่างไร
การใช้รีเลย์และไดโอดที่ระบุข้างต้นคุณจะต้องสร้างแผงวงจรขับรีเลย์ด้านบนให้เสร็จซึ่งอาจทำได้ง่ายๆบนชิ้นส่วนของ veroboard
หลังจากนี้เรามีภารกิจหลักในการกำจัดของเรานั่นคือการรวมสายสีเขียวที่แสดงในแผนภาพด้านบนกับบอร์ด Rx ของรีโมทคอนโทรล
ก่อนการรวมเราจะต้องใส่ mods ในโมดูล Rx ตามที่อธิบายไว้ด้านล่าง:
ใช้ชิ้นส่วนของสายไฟที่หุ้มฉนวนปอกและบรรจุกระป๋องที่ปลายอย่างเหมาะสมให้ทำการเชื่อมต่อ (โดยการบัดกรี) พินขั้วทั้งหมดของรีเลย์และเชื่อมข้อต่อทั่วไปนี้กับสายบวกของบอร์ด Rx
ตอนนี้ในสถานการณ์เช่นนี้เราสามารถสันนิษฐานได้ว่าเมื่อรีเลย์ไม่อยู่ในสถานะเปิดใช้งาน (ผ่านโทรศัพท์ระยะไกล) อินพุตขั้วบวกของรีเลย์แต่ละตัวจะเชื่อมโยงกับจุด N / C ตามลำดับและเมื่อเปิดใช้งานขั้วบวกจากขั้วจะ เปลี่ยนและเชื่อมต่อกับจุด N / O ที่เกี่ยวข้อง
ในระยะสั้นเมื่อเปิดใช้งานผู้ติดต่อ N / O จะได้รับอุปทานที่เป็นบวกดังนั้นเราจึงสนใจอุปทานเชิงบวกนี้จากหน้าสัมผัส N / O เนื่องจากสิ่งเหล่านี้จะเริ่มต้นก็ต่อเมื่อเปิดใช้งานรีเลย์ซึ่งหมายความว่าเมื่อ Tx (เครื่องส่งสัญญาณ ) ถูกกด
ดังนั้นพิน N / O ที่เกี่ยวข้องทั้งหมดจะต้องเชื่อมต่อกับสายสีเขียวของวงจรขับรีเลย์ที่ระบุข้างต้น
เมื่อเสร็จแล้ว Rx จะรวมเข้ากับโมดูลไดรเวอร์รีเลย์เพื่อดำเนินการซ้อมรบที่ตั้งใจไว้ทั้งหมดของรถเข็นควบคุมระยะไกลนั่นคือ: เดินหน้าถอยหลังการเคลื่อนที่และเลี้ยวซ้ายขวา
เปิดแผงควบคุมรีเลย์
เนื่องจากรีเลย์ในขั้นตอนการขับรีเลย์จะต้องรับผิดชอบในการเคลื่อนย้ายมอเตอร์หนักที่เชื่อมต่อกับล้อรถเข็นดังนั้นแหล่งจ่ายไฟสำหรับสิ่งนี้จะต้องมีความแข็งแรงเทียบเท่ากันดังนั้นแบตเตอรี่กรดตะกั่วแบบรอบลึกจึงเหมาะอย่างยิ่งสำหรับการใช้งานนี้
สมมติว่ามอเตอร์ได้รับการจัดอันดับที่ 12V แบตเตอรี่ตะกั่วกรด 40AH จะดีพอที่จะทำให้รถเข็นเคลื่อนที่ได้แม้จะมีน้ำหนักมากก็ตาม
การกำหนดค่าล้อด้วยมอเตอร์สำหรับการซ้อมรบที่ตั้งใจไว้
ดังที่อาจระบุได้ในรูปต่อไปนี้รถเข็นควบคุมระยะไกลที่กล่าวถึงจะต้องใช้ล้อ 4 ล้อสำหรับ [การเคลื่อนย้ายและการหมุนระบบ
อย่างไรก็ตามมีเพียงล้อหน้าสองล้อเท่านั้นที่ทำหน้าที่ในการเปิดใช้งานการเคลื่อนที่ถอยหลังไปข้างหน้าขวาและซ้ายดังนั้นจึงจำเป็นต้องยึดมอเตอร์เข้ากับล้อหน้าทั้งสองของรถเข็นดังที่แสดงในภาพต่อไปนี้:

การกำหนดค่าการเชื่อมต่อล้อรถเข็น
ล้อหลังเป็นเพียงล้อดัมมี่ซึ่งได้รับการแก้ไขเฉพาะเพื่อให้ล้อหมุนฟรีเพื่อตอบสนองต่อคำสั่งของล้อหน้า
ดังที่อาจสังเกตได้ในภาพด้านบนโมดูลที่ทำเครื่องหมายเป็นชุดประกอบ PCB คือแผงควบคุมรีเลย์โมดูลระยะไกลหมายถึงบอร์ดรับสัญญาณระยะไกล Rx ในขณะที่แบตเตอรี่เป็นแบตเตอรี่ 40 AH 12V ซึ่งเราได้กล่าวถึงในส่วนก่อนหน้าของบทความ
หลังจากประกอบคุณอาจต้องปรับแต่งและตรวจสอบการเชื่อมต่อสายมอเตอร์กับบอร์ดไดรเวอร์รีเลย์
สำหรับการเคลื่อนที่ไปข้างหน้าและย้อนกลับมอเตอร์ทั้งสองจะต้องซิงค์กันในทางกลับกันสำหรับการพลิกไปทางขวาหรือทางซ้ายมอเตอร์จะต้องผ่านการเคลื่อนที่แบบหมุนตรงกันข้าม
หากคุณพบว่ามอเตอร์ไม่ทำงานในลักษณะข้างต้นอาจแก้ไขได้มากที่สุดโดยเพียงแค่สลับขั้วของมอเตอร์ตัวใดตัวหนึ่ง สิ่งนี้จะแก้ไขสถานการณ์ทันทีและบังคับให้มอเตอร์ดำเนินการซ้อมรบที่ระบุ
ในที่สุดปุ่ม A B, C, D อาจจับคู่หรือเปลี่ยนได้อย่างเหมาะสมสำหรับการซ้อมรบใด ๆ โดยปรับการเชื่อมโยงสายสีเขียวกับโมดูล Rx ตามความต้องการส่วนบุคคลของผู้ใช้
ก่อนหน้านี้: วิธีปรับเปลี่ยน SMPS สำหรับกระแสและแรงดันไฟฟ้าที่ปรับได้ ถัดไป: เซ็นเซอร์ไมโครเวฟหรือวงจรเซ็นเซอร์ดอปเลอร์