

หุ่นยนต์สอดแนม War Field พร้อมกล้องมองกลางคืน
หุ่นยนต์สอดแนมตามชื่อของมันคือหุ่นยนต์ที่ใช้เพื่อจุดประสงค์ในการสอดแนมดินแดนของศัตรู แอปพลิเคชันสามารถ:
- ในช่วงสงครามที่สามารถใช้เพื่อรวบรวมข้อมูลจากภูมิประเทศของศัตรูและตรวจสอบข้อมูลนั้นในพื้นที่ปลอดภัยห่างไกลและวางแผนอย่างปลอดภัยสำหรับการตอบโต้การโจมตี
- ติดตามสถานที่ตั้งขององค์กรก่อการร้ายจากนั้นวางแผนการโจมตีในเวลาที่เหมาะสม
- เฝ้าระวังพื้นที่ประสบภัยพิบัติที่มนุษย์ไม่สามารถไปได้
แนวคิดสั้น ๆ เกี่ยวกับ War Field Spying Robot
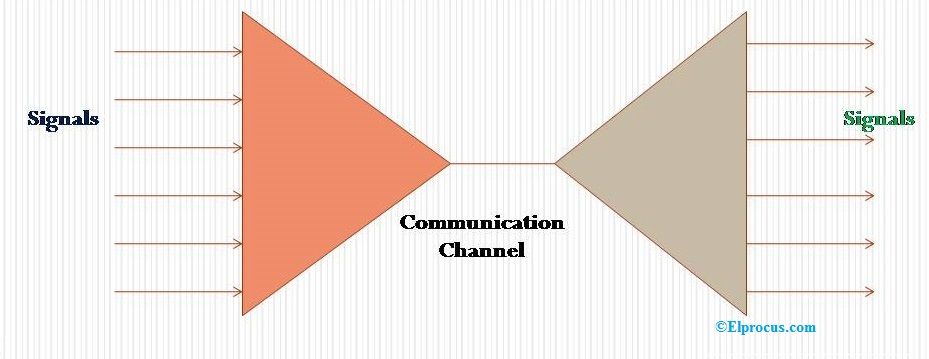
ดังนั้นให้เรามีแนวคิดสั้น ๆ เกี่ยวกับวิธีที่เราสามารถใช้หุ่นยนต์ในสนามสงครามเพื่อจุดประสงค์ในการสอดแนม สิ่งที่จำเป็นคือกล้องไร้สายที่ติดตั้งบนวงจรหุ่นยนต์ซึ่งจะจับภาพและวิดีโอของดินแดนของศัตรูและส่งภาพเหล่านี้ซึ่งได้รับจากหน่วยรับสัญญาณของทีวี
เราสามารถออกแบบต้นแบบง่ายๆของสงคราม หุ่นยนต์สอดแนมภาคสนาม ที่สามารถควบคุมได้จากระยะไกลและภาพที่ส่งมาจากกล้องสามารถตรวจสอบและวิเคราะห์ทางโทรทัศน์ได้
การใช้ฮาร์ดแวร์ของหุ่นยนต์สอดแนมสนามสงคราม
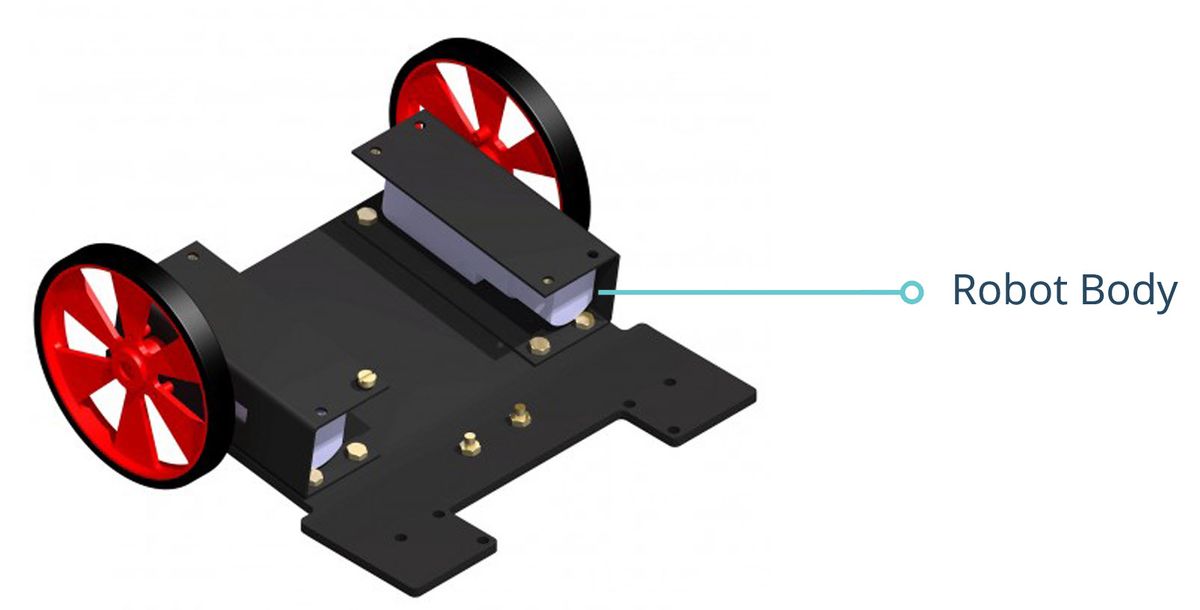
สิ่งที่เราต้องมีคือส่วนประกอบต่อไปนี้ในการออกแบบหุ่นยนต์สอดแนมในสนามสงครามนอกเหนือจากฐานที่มีล้อและมอเตอร์
- ชุดเซ็นเซอร์ - กล้องมองภาพกลางคืนแบบไร้สาย: นอกเหนือจากสิ่งที่กล้องพื้นฐานประกอบด้วยแล้วยังประกอบด้วยชุดเครื่องส่งสัญญาณ จะจับภาพและส่งภาพเหล่านี้ผ่านเครื่องส่งในรูปแบบของสัญญาณดิจิตอลซึ่งได้รับจากหน่วยรับสัญญาณที่เชื่อมต่อกับทีวีหรือคอมพิวเตอร์ กล้องสามารถอยู่ห่างจากเครื่องรับได้ไกลถึง 30 ไมล์ ก กล้องมองกลางคืน สามารถรับการส่องสว่างได้โดยการขยายแสงที่มองเห็นได้โดยใช้ตัวเพิ่มความเข้มของภาพหรือใช้แสงอินฟราเรดโดยตรงกับวัตถุ - การถ่ายภาพความร้อนหรือแสงอินฟราเรดที่สะท้อนจากวัตถุใกล้แสงอินฟราเรด
- หน่วยรับ: หุ่นยนต์ยังประกอบด้วยหน่วยรับสัญญาณที่รับสัญญาณคำสั่งสำหรับควบคุมมอเตอร์และหน่วยหุ่นยนต์
- ตัวกระตุ้น: ประกอบด้วยมอเตอร์กระแสตรงสองตัวเป็นตัวกระตุ้นที่ให้การเคลื่อนที่ย้อนกลับและไปข้างหน้าให้กับหุ่นยนต์
- หน่วยควบคุม: ประกอบด้วยชุดเครื่องส่งสัญญาณระยะไกลซึ่งประกอบด้วยไมโครคอนโทรลเลอร์ตัวเข้ารหัสและโมดูล RF และหน่วยรับสัญญาณที่ฝังอยู่ในวงจรประกอบด้วยโมดูลตัวรับสัญญาณ RF ไมโครคอนโทรลเลอร์และตัวถอดรหัส
กล้องมองภาพกลางคืนของหุ่นยนต์สอดแนมสนามสงครามทำงานอย่างไร
กล้องมองกลางคืนแบบไร้สายที่ฝังอยู่บนหุ่นยนต์ประกอบด้วยตัวส่งสัญญาณไร้สาย กลุ่มของ IR LED ถูกวางไว้ซึ่งใช้เพื่อให้แสง IR ไปยังแหล่งที่มาของภาพ เหตุผลที่ควรใช้แสง IR คือในเวลากลางคืนโดยปกติจะมืดและเนื่องจากกล้องใด ๆ ต้องการแสงเพื่อส่องสว่างแสงอินฟราเรดจึงเป็นตัวเลือกที่ต้องการมากที่สุดเนื่องจากวัตถุทั้งหมดปล่อยแสงอินฟราเรดในช่วง กล้องใช้พลังงานจากแบตเตอรี่ 12 V และถ่ายภาพเหล่านี้และส่งไปยังหน่วยรับสัญญาณที่เชื่อมต่อกับชุดโทรทัศน์ ภาพจะถูกแปลงเป็นสัญญาณดิจิทัลโดยหน่วยเครื่องส่งและหน่วยรับสัญญาณจะรับสัญญาณดิจิทัลเหล่านี้และแปลงกลับเป็นภาพจากนั้นภาพหรือวิดีโอเหล่านี้จะถูกตรวจสอบและวิเคราะห์ในหน่วยโทรทัศน์

แผนภาพบล็อกแสดงการทำงานพื้นฐานของหุ่นยนต์ด้วยกล้องมองกลางคืน
การควบคุมหุ่นยนต์สอดแนมสนามสงคราม
การควบคุมหุ่นยนต์ทั้งหมดทำได้จากระยะไกล ประกอบด้วยส่วนเครื่องส่งที่ส่งข้อมูลที่ต้องการไปยังส่วนเครื่องรับ หุ่นยนต์ถูกปิดโดยการกดปุ่มสองสามปุ่มที่ด้านข้างเครื่องส่งสัญญาณ

แผนภาพบล็อกแสดงเครื่องส่งหุ่นยนต์สอดแนมสนามสงคราม
ชุดเครื่องส่งประกอบด้วยตัวเข้ารหัสที่รับอินพุตข้อมูลแบบขนานจากไมโครคอนโทรลเลอร์ผ่านปุ่มกดและส่งข้อมูลขนานนี้ในรูปแบบอนุกรมผ่านโมดูล RF ในการกดปุ่มกดตามลำดับไมโครคอนโทรลเลอร์จะถูกตั้งโปรแกรมให้ส่งสัญญาณที่เกี่ยวข้องไปยังตัวเข้ารหัสในรูปแบบขนาน ตัวเข้ารหัสจะแปลงสัญญาณขนานเหล่านี้เป็นรูปแบบอนุกรมที่จะส่งโดยโมดูล RF ข้อมูลอนุกรมนี้ถูกมอดูเลตด้วยสัญญาณพาหะโดยใช้เครื่องส่ง RF และเป็นตัวส่ง ตัวอย่างเช่นถ้าเรากดปุ่มซ้ายไมโครคอนโทรลเลอร์จะส่งคำสั่งไปยังหน่วยรับสัญญาณผ่านตัวเข้ารหัสและโมดูล RF

แผนภาพบล็อกแสดงตัวรับของหุ่นยนต์สอดแนมสนามสงคราม
หน่วยรับสัญญาณประกอบด้วยโมดูลตัวรับสัญญาณ RF ซึ่งจำลองสัญญาณที่ได้รับและตัวถอดรหัสซึ่งรับข้อมูลอนุกรมผ่านโมดูลตัวรับ RF และแปลงเป็นรูปแบบขนาน ไมโครคอนโทรลเลอร์ใช้ข้อมูลนี้เพื่อให้สัญญาณควบคุมที่เหมาะสมกับ IC ไดรเวอร์มอเตอร์เพื่อควบคุมการทำงานของมอเตอร์ทั้งสองตัว ดังนั้นหุ่นยนต์จึงสามารถเคลื่อนที่ไปข้างหน้าหรือในทิศทางย้อนกลับได้โดยการควบคุมมอเตอร์ในขณะที่กล้องทำงานพร้อมกัน
หุ่นยนต์ในการทหาร
ตอนนี้เรามีความคิดสั้น ๆ เกี่ยวกับหุ่นยนต์สนามรบแล้วให้เราระลึกถึงหุ่นยนต์ที่ใช้งานได้จริงในการป้องกัน
คุณสมบัติพื้นฐานอย่างหนึ่งของหุ่นยนต์ที่ใช้ในการปฏิบัติการทางทหารคือหุ่นยนต์ไม่ได้ทำงานอัตโนมัติ พวกมันถูกควบคุมจากระยะไกลโดยมนุษย์ หุ่นยนต์หรือเครื่องจักรไร้คนขับตามที่เรียกกันว่าอาจเป็นวัตถุเคลื่อนที่หรือเครื่องบินที่บินได้ซึ่งติดตั้งอุปกรณ์ที่จำเป็นทั้งหมดเช่นเซ็นเซอร์ LIDARS (Laser-based Communication RADARS) กล้อง ฯลฯ การปฏิบัติการของพวกเขาอาจเป็นได้ตั้งแต่การทิ้งระเบิดไปจนถึงการสำรวจศัตรู อาณาเขต
เครื่องจักรไร้คนขับที่ใช้ในปฏิบัติการทางทหารมี 3 ชนิด ได้แก่
- ยานพาหนะภาคพื้นดินไร้คนขับ (UGV): ใช้สำหรับวัตถุประสงค์ภาคพื้นดิน สามารถบรรทุกของหนักเคลื่อนย้ายบนพื้นที่ที่ไม่เรียบและมีเซ็นเซอร์และกล้องต่างๆติดตั้งไว้

Gladiator Tactical UGV
- อากาศยานไร้คนขับ (UAV): ใช้ในการบรรทุกอาวุธทางอากาศและเป็นเครื่องจักรที่บินได้

MQ-9 Reaper อากาศยานไร้คนขับ
- Unmanned Underwater Vehicle (UUV): โดยพื้นฐานแล้วเป็นเรือดำน้ำหรือเครื่องจักรที่สามารถสำรวจใต้น้ำได้

ยันต์ UUV
ตอนนี้เรามีความรู้เกี่ยวกับหุ่นยนต์สนามรบแล้วเรามาทำความรู้จักกันดีกว่า เกี่ยวกับการใช้หุ่นยนต์ ในปฏิบัติการทางทหารในประเทศของเราและองค์กรป้องกันของเรากำลังก้าวหน้าในด้านนี้อย่างไร?
เครดิตภาพ:
- Gladiator Tactical UGV โดย วิกิมีเดีย
- MQ-9 Reaper อากาศยานไร้คนขับโดย วิกิมีเดีย
- ยันต์ UUV by วิศวกร








{kind=link}
{kind=link}