โพสต์กล่าวถึงวงจรไดรฟ์ความถี่ตัวแปรเฟสเดียวหรือวงจร VFD สำหรับควบคุมมอเตอร์ AC ที่เร่งความเร็วโดยไม่ส่งผลกระทบต่อข้อกำหนดการใช้งาน
VFD คืออะไร
มอเตอร์และโหลดอุปนัยอื่น ๆ ที่คล้ายกันโดยเฉพาะไม่ 'ชอบ' การทำงานด้วยความถี่ที่อาจไม่อยู่ในข้อกำหนดการผลิตของพวกเขาและมีแนวโน้มที่จะไม่มีประสิทธิภาพมากหากถูกบังคับให้อยู่ภายใต้สภาวะที่ผิดปกติดังกล่าว
ตัวอย่างเช่นมอเตอร์ที่ระบุสำหรับการทำงานด้วย 60Hz อาจไม่แนะนำให้ทำงานกับความถี่ 50 Hz หรือช่วงอื่น ๆ
การทำเช่นนี้อาจให้ผลลัพธ์ที่ไม่พึงปรารถนาเช่นการทำให้มอเตอร์ร้อนขึ้นลดลงหรือสูงกว่าความเร็วที่กำหนดและการสิ้นเปลืองที่สูงผิดปกติทำให้อุปกรณ์ที่เชื่อมต่อไม่มีประสิทธิภาพและอายุการใช้งานลดลง
อย่างไรก็ตามมอเตอร์ที่ใช้งานภายใต้สภาวะความถี่อินพุตที่แตกต่างกันมักจะกลายเป็นสิ่งที่ถูกบังคับและภายใต้สถานการณ์เช่นนี้ VFD หรือวงจรไดรฟ์ความถี่ตัวแปรจะมีประโยชน์มาก
VFD เป็นอุปกรณ์ที่ช่วยให้ผู้ใช้ควบคุมความเร็วของมอเตอร์ AC โดยการปรับความถี่และแรงดันไฟฟ้าของแหล่งจ่ายไฟเข้าตามข้อกำหนดของมอเตอร์
นอกจากนี้ยังหมายความว่า VFD ช่วยให้เราสามารถใช้งานมอเตอร์ AC ผ่านแหล่งจ่ายไฟ AC แบบกริดที่มีอยู่โดยไม่คำนึงถึงข้อกำหนดด้านแรงดันไฟฟ้าและความถี่โดยการปรับแต่งความถี่และแรงดัน VFD ให้เหมาะสมตามข้อกำหนดของมอเตอร์
โดยปกติจะทำได้โดยใช้การควบคุมที่กำหนดในรูปแบบของปุ่มปรับขนาดด้วยการปรับเทียบความถี่ที่แตกต่างกัน
การสร้าง VFD ที่บ้านอาจฟังดูเป็นเรื่องยากอย่างไรก็ตามการดูการออกแบบที่แนะนำด้านล่างแสดงให้เห็นว่าหลังจากนั้นการสร้างอุปกรณ์ที่มีประโยชน์มากนี้ก็ไม่ใช่เรื่องยาก (ออกแบบโดยฉัน)
การทำงานของวงจร
โดยพื้นฐานแล้ววงจรสามารถแบ่งออกเป็นสองขั้นตอน: ขั้นตอนของไดรเวอร์ half brige และขั้นตอนกำเนิดลอจิก PWM
ขั้นตอนการขับฮาล์ฟบริดจ์ใช้ IC IR2110 ตัวขับฮาล์ฟบริดจ์ซึ่งดูแลเฉพาะขั้นตอนการขับเคลื่อนมอเตอร์ไฟฟ้าแรงสูงซึ่งรวมมอสเฟตด้านสูงและด้านต่ำสองตัวตามลำดับ
IC ไดรเวอร์จึงเป็นหัวใจสำคัญของวงจร แต่ต้องใช้ส่วนประกอบเพียงไม่กี่อย่างในการใช้ฟังก์ชันที่สำคัญนี้
อย่างไรก็ตาม IC ข้างต้นจะต้องมีลอจิกที่สูงและความถี่ต่ำในการขับเคลื่อนโหลดที่เชื่อมต่อด้วยความถี่เฉพาะที่ต้องการ
สัญญาณลอจิกอินพุต hi และ lo เหล่านี้กลายเป็นข้อมูลการทำงานของ IC ไดรเวอร์และต้องรวมสัญญาณสำหรับกำหนดความถี่ที่ระบุเช่นเดียวกับ PWM ในเฟสที่มี AC หลัก
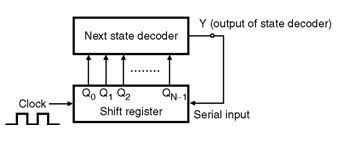
ข้อมูลข้างต้นสร้างขึ้นโดยขั้นตอนอื่นซึ่งประกอบด้วย IC 555 คู่และตัวนับทศวรรษ IC 4017
IC 555 สองตัวทำหน้าที่สร้าง PWM คลื่นไซน์ที่ปรับเปลี่ยนซึ่งสอดคล้องกับตัวอย่าง AC คลื่นเต็มที่ได้มาจากเอาต์พุตวงจรเรียงกระแสแบบก้าวลงสะพาน
IC4017 ทำหน้าที่เป็นเครื่องกำเนิดลอจิกเอาท์พุทขั้วโทเทมซึ่งอัตราความถี่สลับกลายเป็นความถี่หลักกำหนดพารามิเตอร์ของวงจร
ความถี่ในการกำหนดนี้ดึงออกมาจากพิน # 3 ของ IC1 ซึ่งจะดึงพินทริกเกอร์ IC2 ออกและสำหรับการสร้าง PWM ที่แก้ไขแล้วที่พิน # 3 ของ IC2
PWM คลื่นไซน์ที่ปรับเปลี่ยนจะถูกสแกนที่เอาต์พุตของ 4017 IC ก่อนที่จะป้อน IR2110 เพื่อซ้อนทับ 'พิมพ์' ของ PWM ที่แก้ไขแล้วที่เอาต์พุตของไดรเวอร์ half bridge และท้ายที่สุดสำหรับมอเตอร์ที่กำลังทำงาน
ควรเลือกหรือปรับค่า Cx และ 180k pot ให้เหมาะสมเพื่อให้ได้ความถี่ที่ระบุที่ถูกต้องสำหรับมอเตอร์
แรงดันไฟฟ้าสูงที่ท่อระบายน้ำของมอสเฟ็ทด้านสูงจะต้องได้รับการคำนวณอย่างเหมาะสมและได้รับโดยการแก้ไขแรงดันไฟฟ้ากระแสสลับที่มีอยู่หลังจากที่ก้าวขึ้นหรือเหยียบลงอย่างเหมาะสมตามข้อกำหนดของมอเตอร์
การตั้งค่าข้างต้นจะกำหนดโวลต์ที่ถูกต้องต่อเฮิรตซ์ (V / Hz) สำหรับมอเตอร์โดยเฉพาะ
แรงดันไฟฟ้าสำหรับทั้งสองขั้นตอนสามารถทำเป็นสายสามัญได้เช่นเดียวกันสำหรับการเชื่อมต่อกราวด์
TR1 เป็นหม้อแปลงไฟฟ้าแบบขั้นบันได 0-12V / 100mA ซึ่งให้แรงดันไฟฟ้าที่ต้องการในวงจร
วงจรควบคุม PWM

คุณจะต้องรวมเอาท์พุทจาก IC 4017 จากแผนภาพด้านบนไปยังอินพุต HIN และ LIN ของแผนภาพต่อไปนี้อย่างเหมาะสม นอกจากนี้ให้เชื่อมต่อไดโอด 1N4148 ที่ระบุในแผนภาพด้านบนกับประตู MOSFET ด้านต่ำดังที่แสดงในแผนภาพด้านล่าง
ตัวขับมอเตอร์สะพานเต็ม

อัปเดต:

การออกแบบ VFD แบบเดี่ยวที่กล่าวถึงข้างต้นสามารถทำให้ง่ายขึ้นและปรับปรุงเพิ่มเติมได้โดยใช้ IC IRS2453 แบบฟูลบริดจ์แบบออสซิลเลเตอร์ดังที่แสดงด้านล่าง:
ที่นี่ IC 4017 ถูกตัดออกอย่างสมบูรณ์เนื่องจากไดรเวอร์ฟูลบริดจ์ติดตั้งสเตจออสซิลเลเตอร์ของตัวเองดังนั้นจึงไม่จำเป็นต้องมีทริกเกอร์ภายนอกสำหรับ IC นี้
การออกแบบสะพานแบบเต็มรูปแบบการควบคุมเอาต์พุตไปยังมอเตอร์จึงมีการปรับความเร็วตั้งแต่ศูนย์ถึงสูงสุดเต็มรูปแบบ
หม้อที่ขา # 5 ของ IC 2 สามารถใช้สำหรับควบคุมความเร็วและแรงบิดของมอเตอร์ด้วยวิธี PWM
สำหรับการควบคุมความเร็ว V / Hz Rt / Ct ที่เกี่ยวข้องกับ IRS2453 และ R1 ที่เกี่ยวข้องกับ IC1 สามารถปรับแต่งตามลำดับ (ด้วยตนเอง) เพื่อให้ได้ผลลัพธ์ที่เหมาะสม
ทำให้ง่ายยิ่งขึ้น

หากคุณพบว่าส่วนสะพานเต็มล้นคุณสามารถแทนที่ด้วยวงจรสะพานเต็มตาม P, N-MOSFET ดังที่แสดงด้านล่าง ไดรเวอร์ความถี่ตัวแปรนี้ใช้แนวคิดเดียวกันยกเว้นส่วนไดรเวอร์แบบฟูลบริดจ์ซึ่งใช้ P-channel MOSFET ที่ด้านสูงและ N-channel MOSFETS ที่ด้านต่ำ
แม้ว่าการกำหนดค่าอาจดูไม่มีประสิทธิภาพเนื่องจากการมีส่วนร่วมของ P-channel MOSFET (เนื่องจาก RDSon rating สูง) การใช้ P-MOSFET แบบขนานจำนวนมากอาจดูเหมือนเป็นแนวทางที่มีประสิทธิภาพในการแก้ปัญหา RDSon ที่ต่ำ
ที่นี่ 3 MOSFET ใช้คู่ขนานสำหรับอุปกรณ์ P-channel เพื่อให้แน่ใจว่าอุปกรณ์มีความร้อนน้อยที่สุดโดยเทียบเท่ากับคู่ N-channel
ก่อนหน้านี้: วิธีการป้องกัน MOSFET - อธิบายเบื้องต้น ถัดไป: วงจรติดตาม I / V สำหรับแอปพลิเคชั่น Solar MPPT