โปรโตคอล DeviceNet ได้รับการพัฒนาครั้งแรกโดย Allen-Bradley ซึ่งปัจจุบันเป็นเจ้าของโดยแบรนด์ Rockwell Automation มีการตัดสินใจที่จะทำให้เป็นเครือข่ายแบบเปิดโดยส่งเสริมโปรโตคอลนี้ทั่วโลกกับผู้จำหน่ายบุคคลที่สาม ขณะนี้ โปรโตคอลนี้ได้รับการจัดการโดย ODVA Company (Open DeviceNet Vendors Association) ช่วยให้ผู้จำหน่ายบุคคลที่สามและพัฒนามาตรฐานต่างๆ เพื่อใช้ โปรโตคอลเครือข่าย . DeviceNet เป็นเพียงเลเยอร์ที่ด้านบนของ เครือข่ายพื้นที่ควบคุม (CAN) เทคโนโลยีที่พัฒนาโดย Bosch บริษัท. เทคโนโลยีที่ใช้เทคโนโลยีนี้มาจาก ControlNet ซึ่งพัฒนาโดย Allen Bradley นี่คือประวัติของ Devicenet บทความนี้จึงกล่าวถึงภาพรวมของ a โปรโตคอล Devicenet - การทำงานกับแอพพลิเคชั่น
DeviceNet Protocol คืออะไร?
โปรโตคอล DeviceNet เป็นโปรโตคอลเครือข่ายประเภทหนึ่งที่ใช้ในอุตสาหกรรมระบบอัตโนมัติโดยเชื่อมต่ออุปกรณ์ควบคุมที่เชื่อมต่อกันเพื่อแลกเปลี่ยนข้อมูลเช่น PLC , ตัวควบคุมอุตสาหกรรม, เซ็นเซอร์ s, แอคทูเอเตอร์ และระบบอัตโนมัติจากผู้จำหน่ายต่างๆ โปรโตคอลนี้ใช้โปรโตคอลอุตสาหกรรมปกติบนเลเยอร์สื่อ CAN (Controller Area Network) และอธิบายเลเยอร์แอปพลิเคชันเพื่อให้ครอบคลุมโปรไฟล์อุปกรณ์ต่างๆ แอปพลิเคชันหลักของโปรโตคอล Devicenet ประกอบด้วยอุปกรณ์ความปลอดภัย การแลกเปลี่ยนข้อมูล และเครือข่ายการควบคุม I/O ขนาดใหญ่

คุณสมบัติ
ดิ คุณสมบัติของ Devicenet รวมสิ่งต่อไปนี้
- โปรโตคอล DeviceNet รองรับโหนดสูงสุด 64 โหนด รวมถึงอุปกรณ์สูงสุด 2048 เครื่อง
- โทโพโลยีเครือข่ายที่ใช้ในโปรโตคอลนี้คือสายบัสหรือลำตัวผ่านสายวางสำหรับเชื่อมต่ออุปกรณ์
- ความต้านทานการสิ้นสุดค่า 121 โอห์มถูกใช้ที่ด้านใดด้านหนึ่งของสายลำตัว
- มันใช้บริดจ์เกตเวย์โฆษณาทวนและเราเตอร์
- รองรับโหมดต่างๆ เช่น master-slave, peer-to-peer & multi-master เพื่อส่งข้อมูลภายในเครือข่าย
- มันดำเนินการทั้งสัญญาณและพลังงานบนสายเคเบิลที่คล้ายกัน
- โปรโตคอลเหล่านี้ยังสามารถเชื่อมต่อหรือลบออกจากเครือข่ายที่ใช้พลังงาน
- โปรโตคอล DeviceNet รองรับ 8A บนบัสเนื่องจากระบบไม่ปลอดภัยอย่างแท้จริง & การจัดการพลังงานสูง
สถาปัตยกรรม Devicenet
DeviceNet เป็นลิงค์การสื่อสารที่ใช้เชื่อมต่ออุปกรณ์อุตสาหกรรม เช่น เซ็นเซอร์อุปนัย ลิมิตสวิตช์ โฟโตอิเล็กทริก ปุ่มกด ไฟแสดงสถานะ เครื่องอ่านบาร์โค้ด ตัวควบคุมมอเตอร์ และส่วนต่อประสานผู้ปฏิบัติงานกับเครือข่ายโดยหลีกเลี่ยงการเดินสายที่ซับซ้อนและมีค่าใช้จ่ายสูง ดังนั้น การเชื่อมต่อโดยตรงทำให้การสื่อสารระหว่างอุปกรณ์ดีขึ้น ในกรณีของอินเทอร์เฟซ I/O แบบมีสาย การวิเคราะห์ระดับอุปกรณ์จะไม่สามารถทำได้
โปรโตคอล DeviceNet รองรับโทโพโลยีเช่น trunk-line หรือ drop-line เพื่อให้โหนดสามารถเชื่อมต่อกับสายหลักหรือสาขาสั้นได้โดยตรง ทุกเครือข่าย DeviceNet ช่วยให้พวกเขาสามารถเชื่อมต่อได้ถึง 64 โหนดทุกที่ที่มีการใช้โหนดโดย 'สแกนเนอร์' หลัก & โหนด 63 ถูกตั้งค่าให้เป็นโหนดเริ่มต้นโดย 62 โหนดที่สามารถเข้าถึงได้สำหรับอุปกรณ์ แต่ตัวควบคุมอุตสาหกรรมส่วนใหญ่อนุญาตให้เชื่อมต่อกับเครือข่าย DeviceNet หลายเครือข่ายโดยที่ไม่มี ของโหนดที่เชื่อมต่อถึงกันสามารถขยายได้
สถาปัตยกรรมโปรโตคอลเครือข่าย Devicenet แสดงอยู่ด้านล่าง เครือข่ายนี้ทำตามโมเดล OSI ที่ใช้ 7 เลเยอร์จากชั้นกายภาพไปจนถึงชั้นแอปพลิเคชัน เครือข่ายนี้ใช้ CIP (Common Industrial Protocol) ซึ่งใช้ CIP ที่สูงกว่าสามชั้นตั้งแต่เริ่มต้น ในขณะที่สี่เลเยอร์สุดท้ายได้รับการแก้ไขเป็นแอปพลิเคชันของ DeviceNet

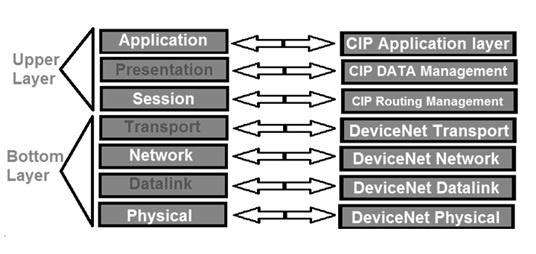
'เลเยอร์ทางกายภาพ' ของ DeviceNet ส่วนใหญ่ประกอบด้วยการรวมกันของโหนด สายเคเบิล แทป และตัวต้านทานการสิ้นสุดภายในโทโพโลยี trunkline–dropline
สำหรับดาต้าลิงค์เลเยอร์ โปรโตคอลเครือข่ายนี้ใช้มาตรฐาน CAN (Controller Area Network) ที่จัดการข้อความทั้งหมดระหว่างอุปกรณ์และคอนโทรลเลอร์
เลเยอร์เครือข่ายและการขนส่งของโปรโตคอลนี้จะสร้างการเชื่อมต่อโดยอุปกรณ์ผ่าน ID การเชื่อมต่อเป็นหลักสำหรับโหนดซึ่งรวมถึงรหัส MAC ของอุปกรณ์และรหัสข้อความ
โหนดระบุช่วงที่ถูกต้องสำหรับ DeviceNet ที่มีตั้งแต่ 0 ถึง 63 ซึ่งมีการเชื่อมต่อที่เป็นไปได้ทั้งหมด 64 รายการ ในที่นี้ ประโยชน์หลักของ ID การเชื่อมต่อคือช่วยให้ DeviceNet รู้จักที่อยู่ที่ซ้ำกันโดยตรวจสอบรหัส MAC และส่งสัญญาณไปยังผู้ให้บริการว่าต้องแก้ไข
เครือข่าย DeviceNet ไม่เพียงแต่ลดค่าใช้จ่ายในการเดินสายและการบำรุงรักษาเท่านั้น เนื่องจากต้องใช้การเดินสายน้อยลง แต่ยังอนุญาตให้อุปกรณ์ที่ใช้กับเครือข่าย DeviceNet จากผู้ผลิตหลายราย โปรโตคอลเครือข่ายนี้อิงตาม Controller Area Network หรือ CAN ซึ่งเรียกว่าโปรโตคอลการสื่อสาร ได้รับการพัฒนาเป็นหลักเพื่อความยืดหยุ่นสูงสุดระหว่างอุปกรณ์ภาคสนามและการทำงานร่วมกันระหว่างผู้ผลิตหลายราย
เครือข่ายนี้ถูกจัดระเบียบเหมือนเครือข่ายบัสอุปกรณ์ที่มีลักษณะการสื่อสารระดับไบต์และความเร็วสูงที่มีการสื่อสารอุปกรณ์แบบอะนาล็อกและกำลังวินิจฉัยสูงผ่านอุปกรณ์เครือข่าย เครือข่าย DeviceNet ประกอบด้วยอุปกรณ์สูงสุด 64 เครื่อง รวมถึงอุปกรณ์เดียวในทุกที่อยู่ของโหนดที่เริ่มต้นตั้งแต่ 0 – 63
มีสายเคเบิลชนิดมาตรฐานสองเส้นที่ใช้ในเครือข่ายนี้แบบหนาและบาง สายเคเบิลแบบหนาใช้สำหรับสายหลักในขณะที่สายแบบบางใช้สำหรับดรอปไลน์ ความยาวสูงสุดของสายเคเบิลขึ้นอยู่กับความเร็วในการส่งข้อมูลเป็นหลัก สายเคเบิลเหล่านี้มักประกอบด้วยสายเคเบิลสี่สี เช่น สีดำ แดง น้ำเงิน และขาว สายสีดำใช้สำหรับแหล่งจ่ายไฟ 0V, สายสีแดงสำหรับแหล่งจ่ายไฟ +24 V, สายสีน้ำเงินสำหรับสัญญาณ CAN ต่ำ และสายสีขาวสำหรับสัญญาณ CAN High
Devicenet ทำงานอย่างไร
DeviceNet ทำงานโดยใช้ CAN (เครือข่ายพื้นที่ควบคุม) สำหรับดาต้าลิงค์เลเยอร์และเทคโนโลยีเครือข่ายที่คล้ายกันนั้นถูกใช้ภายในยานยนต์เพื่อวัตถุประสงค์ในการสื่อสารระหว่างอุปกรณ์อัจฉริยะ DeviceNet รองรับเพียง 64 โหนดบนเครือข่าย DeviceNet เท่านั้น เครือข่ายนี้สามารถรวม Master เดียวและทาสได้สูงสุด 63 คน ดังนั้น DeviceNet จึงสนับสนุนการสื่อสาร Master/Slave & peer-to-peer โดยใช้ I/O รวมถึงการส่งข้อความที่ชัดเจนสำหรับการตรวจสอบ การควบคุม และการกำหนดค่า โปรโตคอลเครือข่ายนี้ใช้ในอุตสาหกรรมระบบอัตโนมัติสำหรับการแลกเปลี่ยนข้อมูลโดยการสื่อสารกับอุปกรณ์ควบคุม มันใช้ Common Industrial Protocol หรือ CIP บนเลเยอร์สื่อ CAN เพื่อกำหนดเลเยอร์แอปพลิเคชันสำหรับครอบคลุมโปรไฟล์อุปกรณ์ที่หลากหลาย
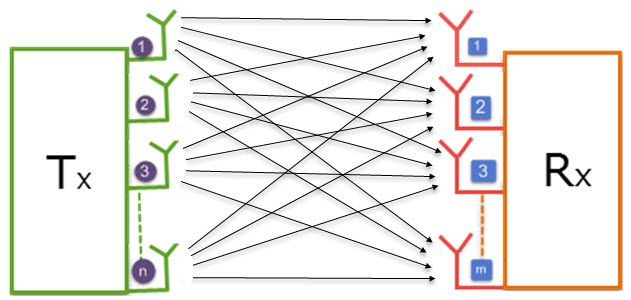
ไดอะแกรมต่อไปนี้แสดงวิธีแลกเปลี่ยนข้อความระหว่างอุปกรณ์ภายในเน็ตเวิร์กของอุปกรณ์
ใน Devicenet ก่อนที่การสื่อสารข้อมูลอินพุต/เอาต์พุตจะเกิดขึ้นระหว่างอุปกรณ์ อุปกรณ์หลักควรเชื่อมต่อกับอุปกรณ์รองด้วยการเชื่อมต่อของข้อความที่ชัดเจนเพื่ออธิบายวัตถุการเชื่อมต่อ
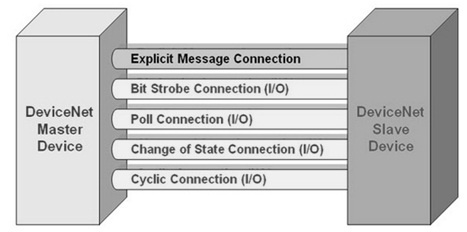
ในการเชื่อมต่อข้างต้น เราเพียงแค่ให้การเชื่อมต่อเดียวสำหรับข้อความที่ชัดเจนและการเชื่อมต่อ I/O สี่รายการ
ดังนั้นโปรโตคอลนี้ส่วนใหญ่ขึ้นอยู่กับแนวคิดวิธีการเชื่อมต่อที่อุปกรณ์หลักควรเชื่อมต่อกับอุปกรณ์สเลฟโดยขึ้นอยู่กับข้อมูล I/O & คำสั่งแลกเปลี่ยนข้อมูล ในการตั้งค่าอุปกรณ์ควบคุมหลัก มีเพียง 4 ขั้นตอนหลักที่เกี่ยวข้องและแต่ละฟังก์ชันจะอธิบายไว้ด้านล่าง
เพิ่มอุปกรณ์ไปยังเครือข่าย
ในที่นี้ เราต้องระบุ MAC ID ของอุปกรณ์สเลฟเพื่อรวมไว้ในเครือข่าย
กำหนดค่าการเชื่อมต่อ
สำหรับอุปกรณ์สเลฟ คุณสามารถตรวจสอบประเภทของการเชื่อมต่อ I/O และความยาวของข้อมูล I/O ได้
สร้างการเชื่อมต่อ
เมื่อทำการเชื่อมต่อแล้ว ผู้ใช้สามารถเริ่มสื่อสารผ่านอุปกรณ์สเลฟได้
เข้าถึงข้อมูล I/O
เมื่อการสื่อสารเสร็จสิ้นโดยอุปกรณ์สเลฟ ข้อมูล I/O จะสามารถเข้าถึงได้ผ่านฟังก์ชันอ่านหรือเขียนที่เทียบเท่ากัน
เมื่อทำการเชื่อมต่ออย่างชัดเจนแล้ว ช่องเชื่อมต่อจะถูกใช้เพื่อแลกเปลี่ยนข้อมูลในวงกว้างโดยใช้โหนดหนึ่งไปยังโหนดอื่น หลังจากนั้น ผู้ใช้สามารถทำการเชื่อมต่อ I/O ได้ภายในขั้นตอนต่อไป เมื่อทำการเชื่อมต่อ I/O แล้ว ข้อมูล I/O ก็สามารถแลกเปลี่ยนกันระหว่างอุปกรณ์ต่างๆ ภายในเครือข่าย DeviceNet ได้ตามความต้องการของอุปกรณ์หลัก ดังนั้น อุปกรณ์หลักจะเข้าถึงข้อมูล I/O ของอุปกรณ์สเลฟด้วยหนึ่งในสี่เทคนิคการเชื่อมต่อ I/O ในการกู้คืน &ส่งข้อมูล I/O ของสเลฟ ไลบรารีนี้ไม่เพียงแต่ใช้งานง่ายเท่านั้น แต่ยังมีฟังก์ชันหลักมากมายของ DeviceNet
รูปแบบข้อความ Devicenet
โปรโตคอล DeviceNet ใช้ CAN แบบปกติทั่วไป โดยเฉพาะอย่างยิ่งสำหรับเลเยอร์ Data Link ดังนั้นนี่คือค่าใช้จ่ายที่น้อยที่สุดที่จำเป็นโดย CAN ที่เลเยอร์ Data Link เพื่อให้ DeviceNet มีประสิทธิภาพมากในขณะที่จัดการข้อความ ผ่านโปรโตคอล Devicenet แบนด์วิดท์เครือข่ายที่น้อยที่สุดจะถูกใช้สำหรับบรรจุภัณฑ์ รวมถึงการส่งข้อความ CIP และโอเวอร์เฮดของตัวประมวลผลน้อยที่สุดเป็นสิ่งจำเป็นผ่านอุปกรณ์เพื่อส่งข้อความดังกล่าว
แม้ว่าข้อกำหนดของ CAN จะกำหนดรูปแบบข้อความประเภทต่างๆ เช่น data, remote, overload & error โปรโตคอล DeviceNet ส่วนใหญ่ใช้เพียงกรอบข้อมูล ดังนั้นรูปแบบข้อความสำหรับกรอบข้อมูล CAN จึงแสดงไว้ด้านล่าง
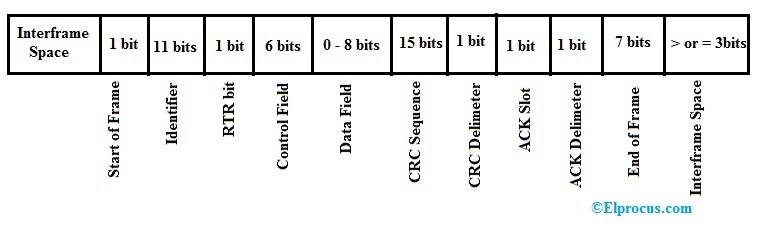
ในกรอบข้อมูลข้างต้น เมื่อเริ่มต้นของเฟรมบิตแล้ว ตัวรับทั้งหมดบนเครือข่าย CAN จะประสานงานกับการเปลี่ยนสถานะเป็นสถานะเด่นจากแบบถอย
ทั้งตัวระบุและบิต RTR (Remote Transmission Request) ในเฟรมจะสร้างช่องอนุญาโตตุลาการซึ่งใช้เพื่อช่วยให้มีลำดับความสำคัญในการเข้าถึงสื่อ เมื่ออุปกรณ์ส่งแล้ว มันจะตรวจสอบทุกบิตที่ส่งในครั้งเดียวและรับทุกบิตที่ส่งเพื่อตรวจสอบความถูกต้องของข้อมูลที่ส่งและเพื่อให้สามารถตรวจจับการส่งข้อมูลแบบซิงโครไนซ์ได้โดยตรง
ฟิลด์ควบคุม CAN ส่วนใหญ่ประกอบด้วย 6 บิตโดยที่เนื้อหาสองบิตได้รับการแก้ไข และส่วนที่เหลืออีก 4 บิตจะใช้เป็นหลักสำหรับฟิลด์ความยาวเพื่อระบุความยาวของฟิลด์ข้อมูลที่กำลังจะมีขึ้นตั้งแต่ 0 ถึง 8 ไบต์
Data Frame ของ CAN ตามด้วยฟิลด์ CRC (Cyclic Redundancy Check) เพื่อระบุข้อผิดพลาดของเฟรมและตัวคั่นการจัดรูปแบบเฟรมต่างๆ
ด้วยการใช้การตรวจจับข้อผิดพลาดประเภทต่างๆ รวมทั้งเทคนิคการจำกัดข้อผิดพลาด เช่น CRC และการลองใหม่โดยอัตโนมัติ โหนดที่ผิดพลาดสามารถหลีกเลี่ยงจากการรบกวน n/w ได้ CAN ให้การตรวจสอบข้อผิดพลาดที่แข็งแกร่งมากรวมถึงความสามารถในการกักขังข้อผิดพลาด
เครื่องมือ
เครื่องมือต่างๆ ที่ใช้ในการวิเคราะห์โปรโตคอล DeviceNet ประกอบด้วยเครื่องมือกำหนดค่าเครือข่ายทั่วไป เช่น SyCon ของ Synergetic, NetSolver ของ Cutler-Hammer, RSNetworX ของ Allen-Bradley, DeviceNet Detective & CAN เครื่องตรวจสอบการรับส่งข้อมูลหรือเครื่องวิเคราะห์ เช่น CAN Explorer ของ Peak และ Canalyzer ของ Vector
การจัดการข้อผิดพลาดใน Devicenet Protocol
การจัดการข้อผิดพลาดเป็นขั้นตอนของการตอบสนองต่อ & การกู้คืนจากเงื่อนไขข้อผิดพลาดภายในโปรแกรม เนื่องจากชั้นดาต้าลิงค์ได้รับการจัดการโดย CAN การจัดการข้อผิดพลาดที่เกี่ยวข้องกับการตรวจจับโหนดที่ผิดพลาดและการปิดโหนดที่ผิดพลาดนั้นเป็นไปตามโปรโตคอลเครือข่าย CAN แต่ข้อผิดพลาดใน Device net ส่วนใหญ่เกิดขึ้นเนื่องจากสาเหตุบางประการ เช่น เมื่อหน่วยของ DeviceNet ไม่ได้เชื่อมต่ออย่างถูกต้อง หรือหน่วยของจอแสดงผลอาจมีปัญหา เพื่อเอาชนะปัญหาเหล่านี้ ต้องปฏิบัติตามขั้นตอนต่อไปนี้
- เชื่อมต่อหน่วย DeviceNet อย่างถูกต้อง
- แยกสายเคเบิลของ DeviceNet
- สำหรับหน่วยแสดงผลทุกหน่วย แหล่งจ่ายไฟจำเป็นต้องวัด
- แรงดันไฟฟ้าต้องปรับในช่วงของแรงดันไฟฟ้าที่กำหนด
- เปิดเครื่องและตรวจสอบว่าไฟ LED ของหน่วย DeviceNet เปิดอยู่หรือไม่
- หากไฟ LED ของหน่วย DeviceNet เปิดอยู่ ตรวจสอบให้แน่ใจว่ารายละเอียดข้อผิดพลาด LED และแก้ไขปัญหาตามนั้น
- หากไม่มีไฟ LED บน Devicenet แสดงว่าไฟอาจมีปัญหา เลยต้องเช็คก่อนว่าพินคอนเนคเตอร์หักหรืองอหรือเปล่า
- เชื่อมต่อ DeviceNet กับการเชื่อมต่อผ่านความสนใจ
Devicenet Vs ControlNet
ความแตกต่างระหว่าง Devicenet และ ControlNet มีดังต่อไปนี้
| Devicenet | ControlNet |
| โปรโตคอล Devicenet ได้รับการพัฒนาโดย Allen-Bradley | โปรโตคอล ControlNet ได้รับการพัฒนาโดย Rockwell Automation |
| DeviceNet เป็นเครือข่ายระดับอุปกรณ์ | ControlNet เป็นเครือข่ายตามกำหนดเวลา |
| DeviceNet ใช้ในการเชื่อมต่อและทำหน้าที่เป็นเครือข่ายการสื่อสารระหว่างตัวควบคุมอุตสาหกรรมและอุปกรณ์ I/O เพื่อมอบเครือข่ายที่คุ้มค่าแก่ผู้ใช้สำหรับการจัดการและแจกจ่ายอุปกรณ์อย่างง่ายด้วยสถาปัตยกรรม | ControlNet ใช้เพื่อมอบการควบคุมความเร็วสูงและการถ่ายโอนข้อมูล I/O ที่สม่ำเสมอและสม่ำเสมอด้วยการเขียนโปรแกรมที่กำหนดตรรกะตามเวลาเฉพาะบนเครือข่าย
|
| มันขึ้นอยู่กับ CIP หรือโปรโตคอลอุตสาหกรรมทั่วไป | มันขึ้นอยู่กับเครือข่ายการควบคุมบัสโทเค็นผ่าน |
| อุปกรณ์ที่ Devicenet อนุญาตนั้นมีมากถึง 64 ในโหนดเดียว | อุปกรณ์ที่ ControlNet อนุญาตนั้นสูงถึง 99 ต่อโหนด |
| ความเร็วนี้ไม่สูงขึ้น | มีความเร็วที่สูงกว่ามากเมื่อเทียบกับ DeviceNet |
| Devicenet จ่ายไฟและสัญญาณในสายเคเบิลเส้นเดียว | ControlNet ไม่ได้จ่ายไฟและสัญญาณในสายเคเบิลเส้นเดียว |
| แก้ไขปัญหาได้ไม่ยาก | เมื่อเทียบกับ Devicenet การแก้ปัญหาเป็นเรื่องยาก |
| อัตราการถ่ายโอนข้อมูลของ DeviceNet คือ 125, 250 หรือ 500 กิโลบิต/วินาที | อัตราการถ่ายโอนข้อมูลของ ControlNet คือ 5 Mbps
|
Devicenet Vs Modbus
ความแตกต่างระหว่าง Devicenet และ Modbus แสดงอยู่ด้านล่าง
|
Devicenet |
Modbus |
| DeviceNet คือ โปรโตคอลเครือข่ายประเภทหนึ่ง | Modbus is โปรโตคอลการสื่อสารแบบอนุกรมประเภทหนึ่ง |
| โปรโตคอลนี้ใช้เพื่อเชื่อมต่ออุปกรณ์ควบคุมสำหรับการแลกเปลี่ยนข้อมูลภายในอุตสาหกรรมระบบอัตโนมัติ | โปรโตคอลนี้ใช้เพื่อวัตถุประสงค์ในการสื่อสารระหว่าง PLC หรือตัวควบคุมลอจิกที่ตั้งโปรแกรมได้ |
| ใช้สายเคเบิลสองเส้น แบบหนาเช่น DVN18 ที่ใช้สำหรับสายหลัก และสายแบบบาง เช่น DVN24 ที่ใช้สำหรับวางสาย | ใช้สายคู่บิดเกลียวและสายหุ้มฉนวนสองสาย
|
| อัตราบอดของเครือข่าย DeviceNet สูงถึง 500kbaud | อัตราบอดของเครือข่าย Modbus คือ 4800, 9600 และ 19200 kbps |
รหัสข้อผิดพลาด Devicenet
รหัสข้อผิดพลาด DeviceNet จากด้านล่าง 63 หมายเลขและมากกว่า 63 หมายเลขแสดงอยู่ด้านล่าง ที่นี่ <63 หมายเลขเรียกว่าหมายเลขโหนดในขณะที่> 63 หมายเลขเรียกว่ารหัสข้อผิดพลาดหรือรหัสสถานะ รหัสข้อผิดพลาดส่วนใหญ่จะใช้กับอุปกรณ์เครื่องเดียวหรือหลายเครื่อง ดังนั้นสิ่งนี้จึงแสดงโดยการกะพริบรหัสและหมายเลขโหนดสลับกัน หากต้องแสดงรหัสและหมายเลขโหนดหลายรายการ การแสดงจะวนซ้ำตามลำดับหมายเลขโหนด
ในรายการต่อไปนี้ รหัสที่มีสีอธิบายความหมายง่ายๆ
- รหัสสีเขียวจะแสดงสภาวะปกติหรือผิดปกติซึ่งเกิดจากการกระทำของผู้ใช้
- รหัสสีน้ำเงินแสดงข้อผิดพลาดหรือสภาวะผิดปกติ
- รหัสสีแดงแสดงข้อผิดพลาดร้ายแรง และอาจต้องเปลี่ยนเครื่องสแกน
นี่คือรหัสข้อผิดพลาด Devicenet พร้อมการดำเนินการที่จำเป็นแสดงอยู่ด้านล่าง
รหัสตั้งแต่ 00 ถึง 63 (สีเขียว): หน้าจอแสดงที่อยู่ของสแกนเนอร์
รหัส 70 (สีน้ำเงิน): แก้ไขที่อยู่ของช่องสแกนเนอร์มิฉะนั้นที่อยู่ที่ขัดแย้งกันของอุปกรณ์
รหัส 71 (สีน้ำเงิน): รายการสแกนจำเป็นต้องกำหนดค่าใหม่และกำจัดข้อมูลที่ผิดกฎหมาย
รหัส 72 (สีน้ำเงิน): อุปกรณ์จำเป็นต้องตรวจสอบและยืนยันการเชื่อมต่อ
รหัส 73 (สีน้ำเงิน): ตรวจสอบว่าอุปกรณ์อยู่ที่หมายเลขโหนดนี้และตรวจสอบว่าอุปกรณ์เท่ากับคีย์อิเล็กทรอนิกส์ตามที่จัดอยู่ในรายการสแกน
รหัส 74 (สีน้ำเงิน): ตรวจสอบการกำหนดค่าสำหรับข้อมูลและการรับส่งข้อมูลเครือข่ายที่ไม่สามารถยอมรับได้
รหัส 75 (สีเขียว): สร้างและดาวน์โหลดรายการสแกน
รหัส 76 (สีเขียว): สร้างและดาวน์โหลดรายการสแกน
รหัส 77 (สีน้ำเงิน): สแกนรายการหรือกำหนดค่าอุปกรณ์ใหม่เพื่อรับขนาดข้อมูลที่เหมาะสมในการส่งและรับ
รหัส 78 (สีน้ำเงิน): รวมหรือลบอุปกรณ์ออกจากเครือข่าย
รหัส 79 (สีน้ำเงิน): ตรวจสอบว่าสแกนเนอร์เชื่อมต่อกับเครือข่ายที่เหมาะสมโดยโหนดอื่นอย่างน้อยหนึ่งโหนดหรือไม่
รหัส 80 (สีเขียว): ค้นหาบิต RUN ภายในการลงทะเบียนคำสั่งเครื่องสแกน และวาง PLC ไว้ในโหมด RUN
รหัส 81 (สีเขียว): ตรวจสอบโปรแกรม PLC เช่นเดียวกับการลงทะเบียนคำสั่งของเครื่องสแกน
รหัส 82 (สีน้ำเงิน): ตรวจสอบการกำหนดค่าของอุปกรณ์
รหัส 83 (สีน้ำเงิน): ตรวจสอบให้แน่ใจว่ารายการสแกน & ตรวจสอบการกำหนดค่าของอุปกรณ์
รหัส 84 (สีเขียว): เริ่มต้นการสื่อสารภายในรายการสแกนตามอุปกรณ์
รหัส 85 (สีน้ำเงิน): จัดเรียงอุปกรณ์ให้มีขนาดข้อมูลน้อยลง
รหัส 86 (สีน้ำเงิน): ตรวจสอบสถานะและการกำหนดค่าอุปกรณ์
รหัส 87 (สีน้ำเงิน): ตรวจสอบการเชื่อมต่อของเครื่องสแกนหลักและการกำหนดค่า
รหัส 88 (สีน้ำเงิน): ตรวจสอบการเชื่อมต่อของสแกนเนอร์
รหัส 89 (สีน้ำเงิน): ตรวจสอบการจัดเรียง/ปิดใช้งาน ADR สำหรับอุปกรณ์นี้
รหัส 90 (สีเขียว): ตรวจสอบให้แน่ใจว่าโปรแกรม PLC & การลงทะเบียนคำสั่งของสแกนเนอร์
รหัส 91 (สีน้ำเงิน): ตรวจสอบระบบสำหรับอุปกรณ์ที่ล้มเหลว
รหัส 92 (สีน้ำเงิน): ตรวจสอบว่าสายวางจ่ายไฟเครือข่ายไปยังพอร์ตของสแกนเนอร์ DeviceNet หรือไม่
รหัส 95 (สีเขียว): ห้ามถอดสแกนเนอร์ออกในขณะที่กำลังอัปเดต FLASH
รหัส 97 (สีเขียว): ตรวจสอบโปรแกรมแลดเดอร์ & รีจิสเตอร์คำสั่งของสแกนเนอร์
รหัส 98 & 99 (สีแดง): เปลี่ยนหรือซ่อมแซมโมดูลของคุณ
รหัส E2, E4 & E5 (สีแดง): เปลี่ยนหรือคืนโมดูล
รหัส E9 (สีเขียว): ตรวจสอบการลงทะเบียนคำสั่ง & พลังของวงจรบน SDN เพื่อกู้คืน
สแกนเนอร์เป็นโมดูลที่มีจอแสดงผลในขณะที่อุปกรณ์นั้นเป็นโหนดอื่นในเครือข่าย โดยปกติแล้วจะเป็นอุปกรณ์รองภายในรายการสแกนของสแกนเนอร์ นี่อาจเป็นลักษณะเฉพาะของโหมดทาสอีกหนึ่งตัวของเครื่องสแกน
ข้อดีของ Devicenet
ข้อดีของโปรโตคอล DeviceNet มีดังต่อไปนี้
- โปรโตคอลเหล่านี้มีให้ในราคาประหยัด มีความน่าเชื่อถือสูง และได้รับการยอมรับอย่างกว้างขวาง แบนด์วิดท์เครือข่ายถูกใช้อย่างมีประสิทธิภาพและพลังงานที่มีอยู่ในเครือข่าย
- สิ่งเหล่านี้สามารถรวบรวมข้อมูลจำนวนมากโดยไม่ต้องเพิ่มต้นทุนของโครงการอย่างมีนัยสำคัญ
- ใช้เวลาน้อยกว่าในการติดตั้ง
- ไม่แพงเมื่อเทียบกับการเดินสายแบบจุดต่อจุดปกติ
- บางครั้ง อุปกรณ์ DeviceNet มีคุณสมบัติการควบคุมมากกว่าเมื่อเปรียบเทียบกับอุปกรณ์ปกติหรืออุปกรณ์สวิตช์
- อุปกรณ์ Devicenet ส่วนใหญ่ให้ข้อมูลการวินิจฉัยที่เป็นประโยชน์มาก ซึ่งทำให้ระบบสามารถแก้ไขปัญหาได้ง่ายขึ้นมาก และลดเวลาหยุดทำงาน
- โปรโตคอลนี้สามารถใช้ได้กับ PC หรือ PLC หรือระบบควบคุมแบบพื้นฐาน
ข้อเสียของโปรโตคอล DeviceNet มีดังต่อไปนี้
- โปรโตคอลเหล่านี้มีความยาวสายเคเบิลสูงสุด
- พวกเขามีข้อความขนาดจำกัดและแบนด์วิดธ์ที่จำกัด
- 90 ถึง 95% ของปัญหา DeviceNet ทั้งหมดเกิดขึ้นเนื่องจากปัญหาการเดินสาย
- จำนวนอุปกรณ์น้อยลงสำหรับแต่ละโหนด
- ขนาดของข้อความที่จำกัด
- ระยะห่างของสายเคเบิลสั้นลงอย่างมาก
แอปพลิเคชันโปรโตคอล DeviceNet
ดิ แอปพลิเคชันโปรโตคอล DeviceNet รวมสิ่งต่อไปนี้
- โปรโตคอล DeviceNet ให้การเชื่อมต่อระหว่างอุปกรณ์อุตสาหกรรมต่างๆ เช่น แอคทูเอเตอร์ ระบบอัตโนมัติ เซ็นเซอร์และอุปกรณ์ที่ซับซ้อนโดยไม่ต้องมีการแทรกแซง
- บล็อกหรือโมดูล I/O
- โปรโตคอล DeviceNet ใช้ในแอปพลิเคชันระบบอัตโนมัติทางอุตสาหกรรม
- โปรโตคอลเครือข่าย DeviceNet ถูกใช้ในอุตสาหกรรมระบบอัตโนมัติสำหรับการเชื่อมต่ออุปกรณ์ควบคุมที่เชื่อมต่อกันเพื่อแลกเปลี่ยนข้อมูล
- โปรโตคอล DeviceNet ใช้สำหรับควบคุมมอเตอร์
- โปรโตคอลนี้ใช้งานได้ในระยะใกล้ ลิมิตสวิตช์อย่างง่าย และปุ่มกดเพื่อควบคุมท่อร่วม
- ใช้ในแอปพลิเคชันไดรฟ์ AC & DC ที่ซับซ้อน
ดังนั้นนี่คือ ภาพรวมของ DeviceNet ซึ่งเป็นเครือข่าย Fieldbus ดิจิทัลแบบหลายหยดที่ใช้เชื่อมต่ออุปกรณ์ต่างๆ จากผู้ค้าหลายราย เช่น PLC, ตัวควบคุมอุตสาหกรรม, เซ็นเซอร์, แอคทูเอเตอร์ และระบบอัตโนมัติ โดยการจัดหาเครือข่ายที่คุ้มค่าแก่ผู้ใช้สำหรับการจัดการและแจกจ่ายอุปกรณ์ง่ายๆ โดยใช้ สถาปัตยกรรม. นี่คือคำถามสำหรับคุณ โปรโตคอลคืออะไร?