ในส่วนนี้ของบทความเราได้เรียนรู้เกี่ยวกับวิธีการใหม่ในการแปลงกลไกการกดแป้นเหยียบในรถยนต์ไฟฟ้าให้เป็นสัญญาณไฟฟ้าที่แตกต่างกันซึ่งอาจนำไปใช้ในการประมวลผลการควบคุมความเร็วของรถเพิ่มเติม
แนวคิดที่อธิบายจะทำงานเหมือนคันเร่งอิเล็กทรอนิกส์ซึ่งจะเพิ่มความเร็วรถเป็นเชิงเส้นเมื่อค่อยๆเหยียบคันเร่งและในทางกลับกันโดยใช้เทคโนโลยี PWM
ความคิดนี้ได้รับการร้องขอจาก Mr. Lokesh Maini
ข้อกำหนดทางเทคนิค
ฉันเป็นช่างกลปัจจุบันทำงานเกี่ยวกับรถยนต์ไฟฟ้าและฉันต้องการควบคุมความเร็วของมอเตอร์โดยใช้แป้นเหยียบ ฉันไม่ได้รับตัวควบคุมสำหรับมอเตอร์ของฉันโปรดช่วยฉันสร้างของตัวเองฉันจะเป็นอย่างสูง
ขอบคุณ
ข้อมูลจำเพาะของมอเตอร์คือ 36volt, 43amps และ 1.5hp brush dc motor
การออกแบบเครื่องจักรกล
รุ่นอิเล็กทรอนิกส์ของคันเร่งส่วนใหญ่จะต้องใช้กลไกในการเปลี่ยนการกดแป้นเหยียบเป็นสัญญาณไฟฟ้าที่แตกต่างกันไปเพื่อให้สัญญาณนี้สามารถประมวลผลผ่านขั้นตอนตัวประมวลผลสัญญาณสำหรับการแปลงที่ต้องการเป็นการควบคุมความเร็วในทางปฏิบัติของ ยานพาหนะ.
สามารถลองใช้แนวคิดหลายอย่างเช่นการใช้เซ็นเซอร์โหลดแบบ piezo เซ็นเซอร์โหลดแบบ capacitive โดยเซ็นเซอร์เรโซแนนซ์เป็นต้นในบทความนี้เราจะเรียนรู้วิธีการที่ง่ายกว่าที่ฉันคิดไว้ซึ่งรวมเอาชุดประกอบ LED / LDR เพื่อให้ได้สิ่งเดียวกัน .

ในการจัดเรียงระบบเครื่องกลไฟฟ้าที่แสดงในรูปด้านบนเราสามารถเห็นส่วนประกอบแบบรวมต่อไปนี้:
เฟืองขนาดเล็กที่ติดตั้งด้วยกลไกสกรู
หัวสกรูที่มีพื้นผิวแผ่นสะท้อนแสงสีขาว
ชุดประกอบ LED / LDR อยู่ด้านหน้าของหัวสกรู
กลไกที่เสนอทำงานอย่างไร
เกียร์ที่แสดงในรูปด้านบนจะต้องล็อคด้วยเกียร์อื่นที่มีอัตราทดสูงกว่าเกียร์นี้ 10 เท่า
เกียร์ที่ใหญ่กว่าจะต้องได้รับการกำหนดค่าด้วยกลไกการเหยียบเพื่อที่จะเริ่มการเคลื่อนไหวแบบหมุนเพื่อตอบสนองต่อการกดแป้นเหยียบ
การตอบสนองการหมุนจากเกียร์จะทำให้เกิดการเคลื่อนที่ไปข้างหน้าของหัวสกรูข้ามห้องที่มีชุดประกอบ LED / LDR
กระบวนการนี้จะทำให้ LDR ได้รับแสงสะท้อนจาก LED ในปริมาณที่แตกต่างกันตามสัดส่วน
ข้อมูลที่แตกต่างกันนี้ (ในรูปแบบของความต้านทานที่แตกต่างกัน) ที่สอดคล้องกับการกดแป้นเหยียบสามารถป้อนเข้ากับวงจรประมวลผลสัญญาณเพื่อบังคับใช้การควบคุมความเร็วที่ต้องการของรถคันนั้น ๆ
ใน โพสต์ถัดไป เราจะเรียนรู้ขั้นตอนการประมวลผลสัญญาณโดยใช้เทคนิค PWM
ใน ส่วนข้างบน เราได้เรียนรู้เกี่ยวกับชุดประกอบตัวแปลงไฟฟ้าแบบธรรมดาสำหรับเปลี่ยนการเหยียบให้เป็นสัญญาณไฟฟ้าที่แตกต่างกันตามสัดส่วน
การแปลง Pedal Action เป็น PWM
ตอนนี้เรามาศึกษาการใช้งานวงจรซึ่งจะช่วยให้เราสามารถแปลงสัญญาณไฟฟ้าของแป้นเหยียบเป็นสัญญาณ PWM ที่แตกต่างกันสำหรับการควบคุมความเร็วมอเตอร์ที่ตั้งใจไว้ของยานพาหนะ

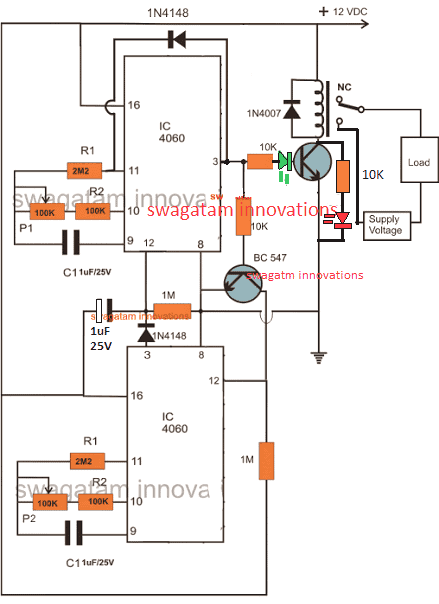
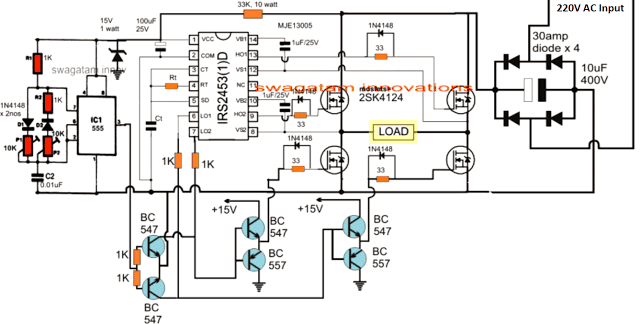
อ้างอิงถึงแผนภาพวงจรด้านบนเราสามารถประเมินการทำงานของวงจรด้วยความช่วยเหลือของประเด็นต่อไปนี้:
IC1 ได้รับการกำหนดค่าให้เป็นเครื่องกำเนิดพัลส์ 80Hz โดยมีเวลาเปิดสูงสุดและเวลาปิดต่ำสุดเป็นรอบการทำงาน
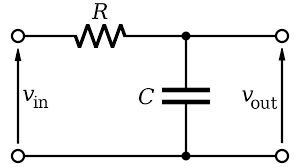
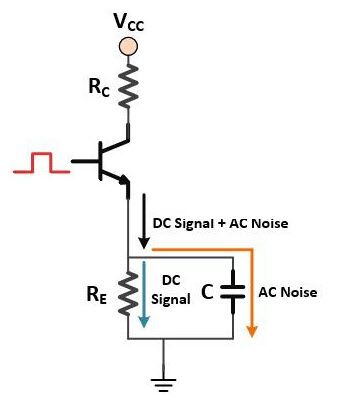
IC2 เป็นอุปกรณ์เปรียบเทียบซึ่งจะแปลงพัลส์ 80Hz ข้างต้นที่ใช้กับพิน 2 ด้วยคลื่นสามเหลี่ยมที่สร้างขึ้นที่พิน 6 และเปรียบเทียบคลื่นสามเหลี่ยมกับแรงดันมอดูเลตที่มีอยู่ที่พิน 5
แรงดันไฟฟ้าแบบมอดูเลต pin5 ได้มาจากตัวส่งสัญญาณ BJT BC547 ซึ่งกำหนดค่าเป็นตัวสะสมทั่วไปโดยมีฐานเชื่อมต่อกับอินพุต LDR ที่ได้จากการเหยียบ
ความต้านทานที่แตกต่างกันในการตอบสนองต่อการกดแป้นเหยียบนั้นเปรียบเทียบกับการตั้งค่าที่ตั้งไว้ล่วงหน้า 100K และขนาดของแรงดันไฟฟ้าตามสัดส่วนได้รับการพัฒนาที่ฐานของทรานซิสเตอร์ซึ่งจะแปลงอินพุตกระแสต่ำให้เป็นสัญญาณกระแสสูงที่เทียบเท่าผ่านพิน 5 ของ IC2
ระดับศักย์ทันทีนี้ได้รับการยอมรับและประมวลผลโดย IC2 ที่สร้างสัญญาณ PWM ตามสัดส่วนสำหรับมอสเฟตและมอเตอร์ที่เชื่อมต่อ
ดังนั้นความเร็วของมอเตอร์จึงถูกควบคุมและแตกต่างกันไปตาม PWM ที่ผันผวนเพื่อตอบสนองต่อการเหยียบของรถ
ขั้นตอนข้างต้นแปลงการเหยียบอย่างมีประสิทธิภาพเป็นการควบคุมการทำงานของยานยนต์และความเร็วของมัน
วิธีการตั้งค่าวงจร
มันง่ายมาก.
- กดแป้นเหยียบจนถึงจุดสูงสุดเพื่อให้หัวสกรูไปถึงตำแหน่งที่ใกล้ที่สุดที่ด้านหน้าของชุดประกอบ LED / LDR
- จากนั้นปรับค่าที่ตั้งไว้ล่วงหน้า 100k จนกระทั่งพิน 3 ของ IC2 เริ่มสร้าง PWM ที่มีความกว้างสูงสุดซึ่งอาจได้รับการยืนยันโดยการวัดแรงดันไฟฟ้าที่พิน 3 เพื่อให้ใกล้เคียงกับแรงดันไฟฟ้าของวงจรมากที่สุดซึ่งก็คือ 5V
- เมื่อเสร็จแล้วขั้นตอนการตั้งค่าอาจถือว่าเสร็จสมบูรณ์
- ขณะนี้สามารถตรวจสอบผลลัพธ์ได้โดยการกดแป้นเหยียบในระดับต่างๆและตรวจสอบความเร็วของมอเตอร์ที่แตกต่างกันในลักษณะที่เหมือนกัน
คู่ของ: วงจร ESR Meter อย่างง่าย ถัดไป: วิธีสร้างวงจร Grow Light