ชีพจร การมอดูเลต (PM) เป็นการมอดูเลตประเภทหนึ่งที่ส่งสัญญาณในรูปแบบพัลส์ ในการมอดูเลตประเภทนี้ สัญญาณต่อเนื่องจะถูกสุ่มตัวอย่างตามช่วงเวลาปกติ ดังนั้นเทคนิคการมอดูเลตนี้จึงถูกนำมาใช้เพื่อส่งข้อมูลอะนาล็อก การมอดูเลตแบบพัลส์แบ่งออกเป็นสองประเภท คือ การมอดูเลตแบบอะนาล็อกและ การมอดูเลตแบบดิจิตอล . การมอดูเลตแบบอะนาล็อกแบ่งออกเป็นสามประเภท PAM, PWM และ PPM ในขณะที่การมอดูเลตแบบดิจิตอลนั้นถูกจำแนกเป็นรหัสพัลส์และการมอดูเลตแบบเดลต้า ดังนั้น บทความนี้จะกล่าวถึงภาพรวมของการมอดูเลตพัลส์ประเภทหนึ่งคือ – การปรับตำแหน่งชีพจร ทฤษฎีหรือ PPM
การปรับตำแหน่งพัลส์คืออะไร?
การมอดูเลตตำแหน่งพัลส์คือการมอดูเลตแบบอะนาล็อกประเภทหนึ่งซึ่งอนุญาตให้มีการเปลี่ยนแปลงภายในตำแหน่งของพัลส์ตามแอมพลิจูดของสัญญาณมอดูเลตตัวอย่าง ซึ่งเรียกว่า PPM หรือการปรับตำแหน่งพัลส์ ในการมอดูเลตประเภทนี้ แอมพลิจูดและความกว้างของพัลส์จะคงที่และตำแหน่งของพัลส์ หลากหลายเท่านั้น
เทคนิค PPM ช่วยให้คอมพิวเตอร์สามารถส่งข้อมูลได้โดยการวัดเวลาที่ใช้ในการเข้าถึงแต่ละแพ็กเก็ตข้อมูลไปยังคอมพิวเตอร์ มักใช้ในการสื่อสารด้วยแสงที่มีการรบกวนหลายเส้นทางขนาดเล็ก การมอดูเลตนี้ส่งสัญญาณดิจิตอลทั้งหมด & ไม่สามารถใช้กับระบบแอนะล็อกได้ มันส่งข้อมูลอย่างง่ายซึ่งไม่มีประสิทธิภาพในขณะถ่ายโอนไฟล์
หากต้องการทราบข้อมูลเพิ่มเติมเกี่ยวกับความแตกต่างระหว่าง PPM, PWM และ PAM คลิกที่นี่
แผนภาพบล็อกการมอดูเลตตำแหน่งพัลส์
แผนภาพบล็อกการมอดูเลตตำแหน่งพัลส์แสดงอยู่ด้านล่างซึ่งสร้างสัญญาณ PPM เราทราบดีว่าสัญญาณมอดูเลตตำแหน่งพัลส์นั้นสร้างได้ง่ายโดยใช้สัญญาณ PWM ดังนั้น ที่ o/p ของตัวเปรียบเทียบ เราได้สันนิษฐานว่าสัญญาณ PWM ถูกสร้างขึ้นแล้ว และตอนนี้เราต้องสร้างสัญญาณ PPM
ในบล็อกไดอะแกรมด้านบน สัญญาณ PAM จะถูกสร้างขึ้นจากโมดูเลเตอร์หนึ่งครั้ง และหลังจากนั้น จะถูกประมวลผลที่ตัวเปรียบเทียบเพื่อสร้างสัญญาณ PWM หลังจากนั้น เอาต์พุตของตัวเปรียบเทียบจะถูกส่งไปยังมัลติไวเบรเตอร์แบบ monostable ซึ่งจะถูกกระตุ้นที่ขอบด้านลบ ดังนั้น ด้วยสัญญาณ PWM ที่ล้าหลัง เอาต์พุตของ monostable จึงสูงขึ้น

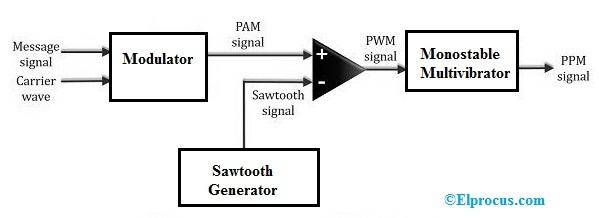
ดังนั้น พัลส์ของสัญญาณ PPM จะเริ่มต้นที่ขอบต่อท้ายของสัญญาณ PWM โปรดทราบว่าระยะเวลาเอาต์พุตสูงส่วนใหญ่ขึ้นอยู่กับส่วนประกอบ RC ของมัลติไวเบรเตอร์ ดังนั้นนี่คือเหตุผลหลักที่ทำให้ได้พัลส์ความกว้างที่เสถียรในกรณีของสัญญาณ PPM
ขอบต่อท้ายของสัญญาณ PWM เลื่อนผ่านสัญญาณมอดูเลต ดังนั้นด้วยการเปลี่ยนแปลงนี้ พัลส์ของ PPM จะแสดงการเปลี่ยนแปลงภายในตำแหน่ง การแสดงรูปคลื่นของสัญญาณ PPM แสดงอยู่ด้านล่าง
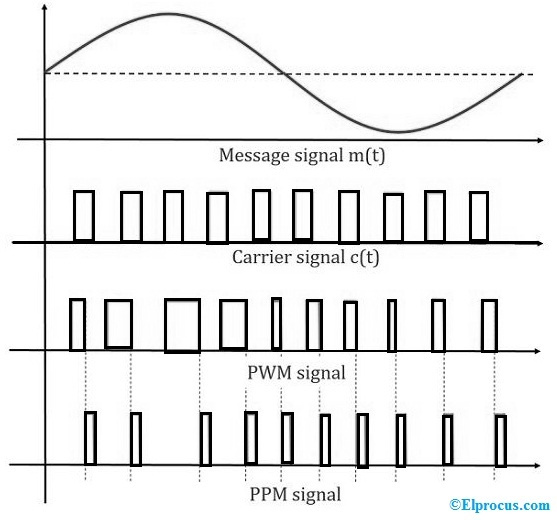
ในรูปคลื่นข้างต้นของการมอดูเลตตำแหน่งพัลส์ รูปคลื่นแรกคือสัญญาณข้อความ สัญญาณที่สองคือสัญญาณพาหะ และสัญญาณที่สามคือสัญญาณ PWM สัญญาณนี้ถือเป็นข้อมูลอ้างอิงสำหรับการสร้างสัญญาณ PPM ตามที่แสดงในแผนภาพสุดท้าย ในรูปคลื่นข้างต้น เราจะสังเกตได้ว่า จุดสิ้นสุดของพัลส์ PWM เช่นเดียวกับ จุดเริ่มต้นของชีพจร PPM ตรงกันซึ่งแสดงด้วยเส้นประ
การตรวจจับการปรับตำแหน่งพัลส์
การตรวจจับแผนภาพบล็อกการมอดูเลตตำแหน่งพัลส์แสดงไว้ด้านล่าง ในบล็อกไดอะแกรมต่อไปนี้ เราสามารถสังเกตได้ว่ามีตัวสร้างพัลส์, SR FF, ตัวสร้างพัลส์อ้างอิง & ตัวแยกสัญญาณ PWM
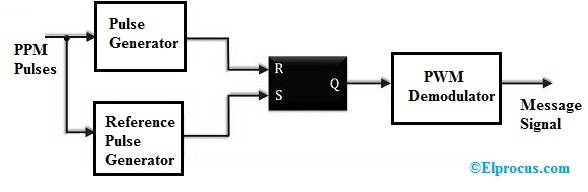
สัญญาณ PPM ที่ส่งมาจากวงจรมอดูเลตจะผิดเพี้ยนไปพร้อมกับสัญญาณรบกวนตลอดการส่งสัญญาณ ดังนั้นสัญญาณที่บิดเบี้ยวนี้จะไปถึงวงจรดีโมดูเลเตอร์ เครื่องกำเนิดพัลส์ที่ใช้ในวงจรนี้จะสร้างรูปคลื่นพัลส์ที่มีระยะเวลาคงที่ รูปคลื่นนี้ถูกกำหนดให้กับพินรีเซ็ตของ SR FF เครื่องกำเนิดพัลส์อ้างอิงสร้างพัลส์อ้างอิงที่มีระยะเวลาคงที่เมื่อส่งสัญญาณ PPM ที่ส่งไปยังมัน ดังนั้นพัลส์อ้างอิงนี้จึงถูกใช้เพื่อตั้งค่า SR FF ที่เอาต์พุตของ FF สัญญาณการตั้งค่าและรีเซ็ตเหล่านี้จะสร้างสัญญาณ PWM นอกจากนี้ สัญญาณนี้จะถูกประมวลผลเพื่อให้สัญญาณข้อความต้นฉบับ
การปรับตำแหน่งพัลส์ทำงานอย่างไร
การมอดูเลตตำแหน่งพัลส์ (PPM) ทำงานง่ายๆ โดยการส่งพัลส์ไฟฟ้า แสง หรือแม่เหล็กไฟฟ้าไปยังคอมพิวเตอร์/อุปกรณ์อื่นเพื่อสื่อสารข้อมูลอย่างง่าย ดังนั้นจึงจำเป็นต้องประสานอุปกรณ์ทั้งสองเข้ากับนาฬิกาที่คล้ายกัน เพื่อที่จะถอดรหัสข้อมูลตามเมื่อมีการถ่ายทอดสัญญาณพัลส์ อีกวิธีหนึ่ง PPM อีกรูปแบบหนึ่งที่เรียกว่าการมอดูเลตตำแหน่งพัลส์แบบดิฟเฟอเรนเชียลจะอนุญาตให้สัญญาณทั้งหมดถูกเข้ารหัสขึ้นอยู่กับความแตกต่างระหว่างเวลาออกอากาศ ซึ่งหมายความว่าอุปกรณ์รับจะต้องตรวจสอบเฉพาะเวลาที่มาถึงที่ไม่ตรงกันเพื่อถอดรหัสการส่งสัญญาณ
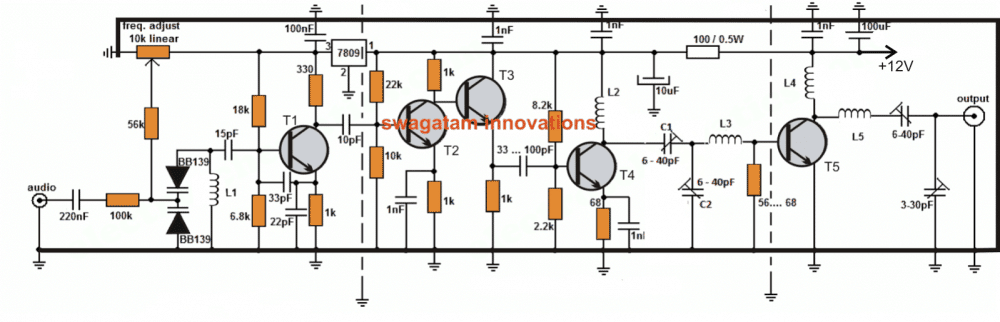
วงจรมอดูเลตตำแหน่งพัลส์
โดยทั่วไปใน PPM แอมพลิจูดและความกว้างของพัลส์จะคงที่ ในขณะที่การจัดเรียงของพัลส์ทุกตัวที่มีการอ้างอิงถึงตำแหน่งพัลส์อ้างอิงจะถูกปรับเปลี่ยนตามค่าตัวอย่างทันทีของสัญญาณมอดูเลต แผนภาพวงจรของการปรับตำแหน่งพัลส์ด้วยตัวจับเวลา 555 แสดงอยู่ด้านล่าง
วงจรนี้สามารถสร้างด้วยชิ้นส่วนอิเล็กทรอนิกส์ต่างๆ เช่น ไอซีไทเมอร์ 555 , ตัวต้านทาน R1 และ R2, ตัวเก็บประจุ เช่น C2 & C3 และ ไดโอด D1. ให้การเชื่อมต่อตามวงจรที่ระบุด้านล่าง
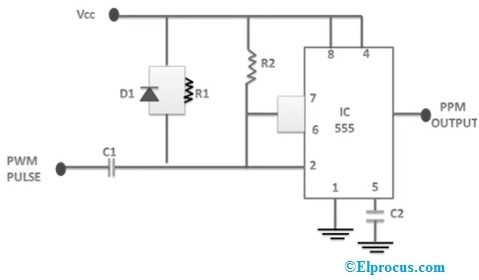
โดยพื้นฐานแล้ว 555 ไอซี เป็น IC เสาหินที่มีอยู่ในแพ็คเกจ DIP 8 พิน มันถูกใช้ในแอพพลิเคชั่นมากมายที่ใช้เป็น มัลติไวเบรเตอร์ที่เสถียร และ มัลติไวเบรเตอร์แบบบิสเทเบิล เพื่อสร้างคลื่นสามเหลี่ยม คลื่นสี่เหลี่ยม เป็นต้น ดังนั้น การสร้าง PPM จึงถือเป็นหนึ่งในการประยุกต์ใช้ไอซี 555
มาดูกันว่าสัญญาณ PPM ถูกสร้างขึ้นโดยใช้วงจร PPM ด้านบนด้วยไอซี 555 อย่างไร สำหรับการสร้างพัลส์ PWM และ PPM ตัวจับเวลา 555 จะทำงานในโหมดโมโนสเตเบิล โหมด Monostable เป็นหนึ่งในโหมดของเครื่องมัลติไวเบรเตอร์ โดยทั่วไปแล้วมัลติไวเบรเตอร์จะเป็นวงจรอิเล็กทรอนิกส์ที่ไม่มีสถานะคงที่หนึ่งหรือสองสถานะ ขึ้นอยู่กับสถานะที่เสถียร มีมัลติไวเบรเตอร์แบบ Astable, Bistable และ Monostable อยู่สามประเภท
พัลส์ PWM อินพุตถูกนำไปใช้กับพิน 2 ของอินพุตทริกเกอร์ที่มีลักษณะคล้าย IC 555 ผ่านเครือข่ายดิฟเฟอเรนติเอเตอร์ที่เกิดจากไดโอด D1 ตัวต้านทาน R และตัวเก็บประจุ C1 ตอนนี้ขึ้นอยู่กับอินพุตที่ได้รับที่พิน 2 เอาต์พุตจะได้รับที่พิน 3 ของไอซีตัวจับเวลา 555 ตัว เอาต์พุตจะยังคงสูงตามระยะเวลาที่กำหนดโดยตัวต้านทาน R2 และ C2 เพื่อให้ความกว้างและแอมพลิจูดของแต่ละพัลส์คงที่ และเราจะได้สัญญาณ PPM ที่เอาต์พุต
ด้วยวิธีนี้ ไอซีไทเมอร์ 555 ใช้สำหรับสร้างสัญญาณ PPM
ข้อดี
เดอะ ข้อดีของการปรับตำแหน่งพัลส์ รวมสิ่งต่อไปนี้
- PPM มีประสิทธิภาพการใช้พลังงานสูงสุดเมื่อเทียบกับการมอดูเลตอื่นๆ
- การมอดูเลตนี้มีสัญญาณรบกวนแอมพลิจูดที่เสถียรน้อยกว่า
- การมอดูเลตนี้จะแยกสัญญาณออกจากสัญญาณรบกวนได้อย่างง่ายดาย
- ต้องการพลังงานน้อยกว่าเมื่อเทียบกับ PAM
- การแยกสัญญาณและเสียงรบกวนทำได้ง่ายมาก
- มีกำลังส่งคงที่
- เทคนิคนี้ง่ายในการแบ่งสัญญาณจากสัญญาณรบกวน
- ต้องการพลังงานน้อยกว่ามากเมื่อเทียบกับ PAM & PDM เนื่องจากแอมพลิจูดและพัลส์ระยะเวลาสั้น
- การกำจัดและแยกสัญญาณรบกวนอย่างง่ายนั้นง่ายมากในการมอดูเลตประเภทนี้
- การใช้พลังงานยังต่ำมากเมื่อเทียบกับการมอดูเลตอื่นๆ เนื่องจากแอมพลิจูดและความกว้างของพัลส์ที่เสถียร
- PPM สื่อสารเฉพาะคำสั่งอย่างง่ายจาก Tx ถึง Rx ดังนั้นจึงมักใช้ในแอพพลิเคชั่นขนาดเล็กเนื่องจากมีความจำเป็นต่อระบบน้อย
ข้อเสีย
เดอะ ข้อเสียของการปรับตำแหน่งพัลส์ รวมสิ่งต่อไปนี้
- PPM มีความซับซ้อนมาก
- ต้องการแบนด์วิธที่มากขึ้นสำหรับการรับส่งข้อมูลเมื่อเทียบกับ PAM
- มีความไวสูงต่อการรบกวนแบบหลายเส้นทาง เช่น เสียงสะท้อนที่สามารถรบกวนการส่งสัญญาณโดยการเปลี่ยนความแตกต่างของเวลามาถึงของทุกสัญญาณ
- การซิงโครไนซ์เป็นสิ่งจำเป็นระหว่างตัวส่งและตัวรับ ซึ่งไม่สามารถทำได้ในแต่ละครั้ง & เราต้องการช่องสัญญาณเฉพาะสำหรับมัน
- จำเป็นต้องมีอุปกรณ์พิเศษสำหรับการมอดูเลตประเภทนี้
แอพพลิเคชั่น
เดอะ การประยุกต์ใช้การปรับตำแหน่งพัลส์ รวมสิ่งต่อไปนี้
- PPM ส่วนใหญ่จะใช้ในระบบโทรคมนาคมและระบบควบคุมการจราจรทางอากาศ
- การมอดูเลตนี้ใช้ในการควบคุมวิทยุ ระบบสื่อสารด้วยแสง และการใช้งานทางทหาร
- เทคนิคนี้ใช้ในเครื่องบิน รถยนต์ควบคุมระยะไกล รถไฟ ฯลฯ
- PPM ใช้ในการตรวจจับที่ไม่สอดคล้องกันในทุกที่ที่เครื่องรับไม่ต้องการการตรวจจับใดๆ เฟสล็อคลูป หรือ PLL เพื่อติดตามเฟสของผู้ให้บริการ
- ใช้ในการสื่อสาร RF (ความถี่วิทยุ)
- นอกจากนี้ยังใช้ในสมาร์ทการ์ดความถี่สูงแบบไร้สัมผัส แท็ก ID ความถี่วิทยุ ฯลฯ
ดังนั้น ทั้งหมดนี้เป็นเรื่องเกี่ยวกับ ภาพรวมของการปรับตำแหน่งพัลส์ - การทำงานและการใช้งาน นี่คือคำถามสำหรับคุณคืออะไร พี.ดับบลิว.เอ็ม ?