ในช่วง 18ธศตวรรษเองก็มีวิวัฒนาการของมอเตอร์กระแสตรง การพัฒนามอเตอร์กระแสตรงได้รับการปรับปรุงอย่างกว้างขวางและถูกนำไปใช้อย่างมีนัยสำคัญในหลายอุตสาหกรรม ในช่วงต้นของปี 1800 และด้วยการปรับปรุงในปี 1832 มอเตอร์กระแสตรงได้รับการพัฒนาโดย Sturgeon นักวิจัยชาวอังกฤษ เขาได้คิดค้นมอเตอร์กระแสตรงประเภทคอมมิวเตเตอร์เริ่มต้นซึ่งมีความสามารถในการจำลองเครื่องจักรด้วย แต่อาจมีใครสงสัยว่าการทำงานของมอเตอร์กระแสตรงคืออะไรและเหตุใดจึงสำคัญที่ต้องรู้เกี่ยวกับการควบคุมความเร็วมอเตอร์กระแสตรง ดังนั้นบทความนี้จึงอธิบายการทำงานและเทคนิคการควบคุมความเร็วต่างๆอย่างชัดเจน
DC Motor คืออะไร?
มอเตอร์ Dc ทำงานโดยใช้กระแสตรงซึ่งจะเปลี่ยนพลังงานไฟฟ้าที่ได้รับเป็นพลังงานกล สิ่งนี้ก่อให้เกิดการเปลี่ยนแปลงแบบหมุนเวียนในตัวอุปกรณ์ซึ่งส่งมอบพลังในการใช้งานแอพพลิเคชั่นต่างๆในหลายโดเมน
การควบคุมความเร็วมอเตอร์กระแสตรงเป็นหนึ่งในคุณสมบัติที่มีประโยชน์ที่สุดของมอเตอร์ ด้วยการควบคุมความเร็วของมอเตอร์คุณสามารถเปลี่ยนความเร็วของมอเตอร์ได้ตามความต้องการและสามารถรับการทำงานที่ต้องการได้
กลไกการควบคุมความเร็วสามารถใช้ได้ในหลายกรณีเช่นการควบคุมการเคลื่อนที่ของยานยนต์หุ่นยนต์การเคลื่อนที่ของมอเตอร์ในโรงงานกระดาษและการเคลื่อนที่ของมอเตอร์ในลิฟต์ที่ มอเตอร์กระแสตรงประเภทต่างๆ ใช้
หลักการทำงานของ DC Motor
มอเตอร์กระแสตรงแบบธรรมดาทำงานบนหลักการที่ว่าเมื่อวางตัวนำกระแสไฟฟ้าไว้ใน แม่เหล็กที่ซื่อสัตย์ d มันประสบกับแรงทางกล ในมอเตอร์กระแสตรงที่ใช้งานได้จริงกระดองเป็นตัวนำที่มีกระแสไฟฟ้าและสนามจะให้สนามแม่เหล็ก
เมื่อตัวนำ (กระดอง) จ่ายกระแสไฟฟ้าจะสร้างฟลักซ์แม่เหล็กของตัวเอง ฟลักซ์แม่เหล็กอาจเพิ่มขึ้นในฟลักซ์แม่เหล็กเนื่องจากขดลวดสนามในทิศทางเดียวหรือยกเลิกฟลักซ์แม่เหล็กเนื่องจากขดลวดสนาม การสะสมของฟลักซ์แม่เหล็กในทิศทางเดียวเมื่อเทียบกับอีกทิศทางหนึ่งทำให้เกิดแรงบนตัวนำดังนั้นจึงเริ่มหมุน
ตามกฎของการเหนี่ยวนำแม่เหล็กไฟฟ้าของฟาราเดย์การหมุนของตัวนำทำให้เกิด EMF . EMF นี้ตามกฎหมายของ Lenz มีแนวโน้มที่จะต่อต้านสาเหตุนั่นคือแรงดันไฟฟ้าที่ให้มา ดังนั้นมอเตอร์กระแสตรงจึงมีลักษณะพิเศษมากในการปรับแรงบิดในกรณีที่มีภาระแตกต่างกันเนื่องจาก EMF ด้านหลัง
เหตุใดการควบคุมความเร็วมอเตอร์ DC จึงมีความสำคัญ
การควบคุมความเร็วในเครื่องแสดงผลกระทบต่อความเร็วในการหมุนของมอเตอร์ซึ่งมีผลโดยตรงต่อการทำงานของเครื่องและมีความสำคัญต่อประสิทธิภาพและผลลัพธ์ของประสิทธิภาพ ในขณะทำการขุดเจาะวัสดุทุกชนิดมีความเร็วในการหมุนของตัวเองและจะเปลี่ยนไปตามขนาดดอกสว่านด้วย
ในสถานการณ์ของการติดตั้งปั๊มจะมีการเปลี่ยนแปลงในอัตราปริมาณงานดังนั้นสายพานลำเลียงจึงต้องสอดคล้องกับความเร็วในการทำงานของอุปกรณ์ ปัจจัยเหล่านี้ขึ้นอยู่กับความเร็วของมอเตอร์โดยตรงหรือโดยอ้อม ด้วยเหตุนี้จึงควรพิจารณาความเร็วมอเตอร์ DC และสังเกตวิธีการควบคุมความเร็วประเภทต่างๆ
การควบคุมความเร็ว DC Motor ทำได้ด้วยตนเองโดยผู้ปฏิบัติงานหรือโดยใช้เครื่องมือควบคุมอัตโนมัติใด ๆ สิ่งนี้ดูเหมือนจะตรงกันข้ามกับการ จำกัด ความเร็วซึ่งจะต้องมีการควบคุมความเร็วซึ่งตรงข้ามกับการเปลี่ยนแปลงตามธรรมชาติของความเร็วเนื่องจากความแปรผันของภาระเพลา
หลักการควบคุมความเร็ว
จากรูปด้านบนสมการแรงดันไฟฟ้าของวิ มอเตอร์กระแสตรง คือ
V = Eb + IaRa
V คือแรงดันไฟฟ้าที่ให้มา Eb คือ EMF ด้านหลัง Ia คือกระแสกระดองและ Ra คือความต้านทานของกระดอง
เรารู้อยู่แล้ว
Eb = (PøNZ) / 60A
P - จำนวนเสา
A - ค่าคงที่
Z - จำนวนตัวนำ
N- ความเร็วของมอเตอร์
เราจะได้รับการแทนที่ค่าของ Eb ในสมการแรงดันไฟฟ้า
V = (PøNZ) / 60A) + IaRa
หรือ V - IaRa = (PøNZ) / 60A
เช่น N = (PZ / 60A) (V - IaRa) / ø
สมการข้างต้นสามารถเขียนเป็น:
N = K (V - IaRa) / ø, K เป็นค่าคงที่
นี่หมายถึงสามสิ่ง:
- ความเร็วของมอเตอร์เป็นสัดส่วนโดยตรงกับแรงดันไฟฟ้า
- ความเร็วของมอเตอร์แปรผกผันกับแรงดันไฟฟ้าของกระดอง
- ความเร็วของมอเตอร์แปรผกผันกับฟลักซ์เนื่องจากการค้นพบภาคสนาม
ดังนั้นความเร็วของมอเตอร์กระแสตรงสามารถควบคุมได้สามวิธี:
- โดยการเปลี่ยนแรงดันไฟฟ้า
- โดยการเปลี่ยนฟลักซ์และเปลี่ยนกระแสผ่านสนามที่คดเคี้ยว
- โดยการเปลี่ยนแปลงแรงดันไฟฟ้าของกระดองและโดยการเปลี่ยนแปลงความต้านทานของกระดอง
เทคนิคหลายอย่างของการควบคุมความเร็วมอเตอร์กระแสตรง
เนื่องจากมอเตอร์กระแสตรงมีสองประเภทที่นี่เราจะพูดถึงวิธีการควบคุมความเร็วของทั้งซีรีส์ DC และ มอเตอร์ปัด
การควบคุมความเร็วมอเตอร์ DC ในประเภทซีรีส์
สามารถแบ่งออกเป็นสองประเภท ได้แก่ :
- เทคนิคการควบคุมกระดอง
- เทคนิคการควบคุมภาคสนาม
เทคนิคการควบคุมกระดองแบ่งออกเป็นสามประเภท
- ความต้านทานที่ควบคุมด้วยกระดอง
- การควบคุมกระดองแบบแบ่งส่วน
- แรงดันไฟฟ้าขั้วกระดอง
ความต้านทานที่ควบคุมด้วยกระดอง
เทคนิคนี้ใช้กันอย่างแพร่หลายในกรณีที่ความต้านทานการควบคุมมีการเชื่อมต่อแบบอนุกรมกับแหล่งจ่ายมอเตอร์ ภาพด้านล่างอธิบายสิ่งนี้

การควบคุมความต้านทานของกระดอง
การสูญเสียกำลังที่เกิดขึ้นในความต้านทานการควบคุมของมอเตอร์ซีรีส์ DC สามารถเพิกเฉยได้เนื่องจากเทคนิคการควบคุมนี้ส่วนใหญ่จะใช้เป็นระยะเวลานานเพื่อลดความเร็วในขณะที่มีการโหลดแสง เป็นเทคนิคที่คุ้มค่าสำหรับแรงบิดถาวรและส่วนใหญ่นำไปใช้ในการขับรถเครนรถไฟและยานพาหนะอื่น ๆ
Shunted Armature Control
ที่นี่ rheostat จะอยู่ในทั้งอนุกรมและการเชื่อมต่อแบบแบ่งกับกระดอง จะมีการเปลี่ยนแปลงระดับแรงดันไฟฟ้าซึ่งใช้กับเกราะและสิ่งนี้จะแตกต่างกันไปตามการเปลี่ยนซีรีส์ rheostat . ในขณะที่การเปลี่ยนแปลงของกระแสกระตุ้นเกิดขึ้นโดยการเปลี่ยน shunt rheostat เทคนิคการควบคุมความเร็วในมอเตอร์กระแสตรงนี้ไม่ได้มีราคาแพงนักเนื่องจากการสูญเสียพลังงานอย่างมีนัยสำคัญในความต้านทานการควบคุมความเร็ว ความเร็วสามารถควบคุมได้ในระดับหนึ่ง แต่ไม่เกินระดับความเร็วปกติ

วิธีการควบคุมความเร็วมอเตอร์ DC ของกระดองแบบปัด
แรงดันขั้วของกระดอง
ความเร็วของมอเตอร์ซีรีส์ DC สามารถทำได้โดยใช้แหล่งจ่ายไฟไปยังมอเตอร์โดยใช้แรงดันไฟฟ้าที่แตกต่างกัน แต่วิธีนี้มีค่าใช้จ่ายสูงและไม่ได้นำไปใช้อย่างกว้างขวาง
เทคนิคการควบคุมภาคสนามแบ่งออกเป็นสองประเภท:
- สนาม Diverter
- การควบคุมฟิลด์ที่แตะ (การควบคุมฟิลด์ที่แตะ)
เทคนิค Field Diverter
เทคนิคนี้ใช้ไดเวอร์เตอร์ อัตราฟลักซ์ที่อยู่ทั่วทั้งสนามสามารถลดลงได้โดยการปัดบางส่วนของกระแสมอเตอร์ข้ามฟิลด์อนุกรม ยิ่งความต้านทานของไดเวอร์เตอร์น้อยเท่าไหร่กระแสของสนามก็น้อยลง เทคนิคนี้ใช้มากกว่าช่วงความเร็วปกติและใช้กับไดรฟ์ไฟฟ้าซึ่งความเร็วจะเพิ่มขึ้นเมื่อมีภาระลดลง

Field Diverter DC Motor Speed Control
การควบคุมฟิลด์ที่แตะ
นอกจากนี้ด้วยการลดลงของฟลักซ์ความเร็วจะเพิ่มขึ้นและทำได้โดยการลดการหมุนของสนามจากจุดที่กระแสไฟฟ้าเกิดขึ้น ที่นี่จำนวนของการแตะในสนามที่คดเคี้ยวจะถูกนำออกและเทคนิคนี้ใช้ในการลากด้วยไฟฟ้า
การควบคุมความเร็วของ DC Shunt Motor
สามารถแบ่งออกเป็นสองประเภท ได้แก่ :
- เทคนิคการควบคุมภาคสนาม
- เทคนิคการควบคุมกระดอง
วิธีการควบคุมภาคสนามสำหรับ DC Shunt Motor
ในวิธีนี้ฟลักซ์แม่เหล็กเนื่องจากขดลวดสนามจะแตกต่างกันเพื่อให้ความเร็วของมอเตอร์แตกต่างกันไป
เนื่องจากฟลักซ์แม่เหล็กขึ้นอยู่กับกระแสที่ไหลผ่านขดลวดสนามจึงสามารถเปลี่ยนแปลงได้โดยการเปลี่ยนกระแสผ่านขดลวดสนาม สิ่งนี้สามารถทำได้โดยใช้ตัวต้านทานตัวแปรในอนุกรมกับตัวต้านทานแบบขดลวดสนาม
ในขั้นต้นเมื่อตัวต้านทานแบบแปรผันถูกเก็บไว้ที่ตำแหน่งต่ำสุดกระแสไฟฟ้าที่กำหนดจะไหลผ่านขดลวดสนามเนื่องจากแรงดันไฟฟ้าที่กำหนดและเป็นผลให้ความเร็วคงปกติ เมื่อความต้านทานเพิ่มขึ้นเรื่อย ๆ กระแสที่ผ่านขดลวดสนามจะลดลง สิ่งนี้จะลดฟลักซ์ที่เกิดขึ้น ดังนั้นความเร็วของมอเตอร์จึงเพิ่มขึ้นเกินค่าปกติ
วิธีการควบคุมความต้านทานของกระดองสำหรับมอเตอร์ DC Shunt
ด้วยวิธีนี้ความเร็วของมอเตอร์กระแสตรงสามารถควบคุมได้โดยการควบคุมความต้านทานของกระดองเพื่อควบคุมแรงดันไฟฟ้าที่ตกคร่อมกระดอง วิธีนี้ยังใช้ตัวต้านทานแบบแปรผันในอนุกรมกับกระดอง
เมื่อตัวต้านทานตัวแปรถึงค่าต่ำสุดความต้านทานของกระดองจะอยู่ในระดับปกติดังนั้นแรงดันไฟฟ้าของกระดองจะลดลง เมื่อค่าความต้านทานค่อยๆเพิ่มขึ้นแรงดันไฟฟ้าทั่วกระดองจะลดลง ซึ่งจะนำไปสู่การลดความเร็วของมอเตอร์
วิธีนี้ทำให้ความเร็วของมอเตอร์ต่ำกว่าช่วงปกติ
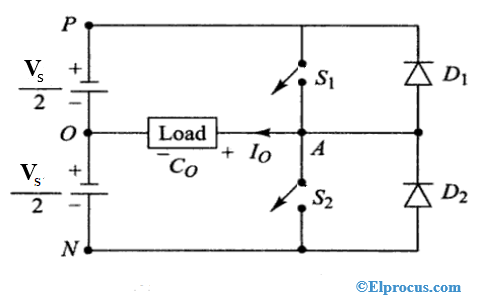
วิธีการควบคุมแรงดันกระดองสำหรับมอเตอร์ DC Shunt (วิธี Ward Leonard)
เทคนิค Ward Leonard ของ วงจรควบคุมความเร็วมอเตอร์กระแสตรง แสดงดังต่อไปนี้:
ในภาพด้านบน M เป็นมอเตอร์หลักที่ต้องควบคุมความเร็วและ G สอดคล้องกับเครื่องกำเนิดไฟฟ้ากระแสตรงแบบตื่นเต้นทีละตัวซึ่งขับเคลื่อนโดยใช้มอเตอร์สามเฟสและอาจเป็นมอเตอร์ซิงโครนัสหรือมอเตอร์เหนี่ยวนำ รูปแบบของเครื่องกำเนิดไฟฟ้ากระแสตรงและชุดมอเตอร์ที่ขับเคลื่อนด้วยกระแสสลับนี้เรียกว่าชุด M-G
แรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าจะแตกต่างกันไปโดยการเปลี่ยนกระแสสนามของเครื่องกำเนิดไฟฟ้า ระดับแรงดันไฟฟ้านี้เมื่อจัดให้กับส่วนกระดองของมอเตอร์กระแสตรงและ M จะแตกต่างกันไป เพื่อให้ฟลักซ์ของสนามมอเตอร์คงที่จึงต้องรักษากระแสของสนามมอเตอร์ให้คงที่ เมื่อมีการควบคุมความเร็วของมอเตอร์กระแสของกระดองสำหรับมอเตอร์จะเท่ากับระดับที่กำหนด
กระแสไฟฟ้าของสนามที่ส่งจะแตกต่างกันเพื่อให้ระดับแรงดันไฟฟ้าของกระดองแตกต่างกันไปตั้งแต่ '0' ถึงระดับพิกัด เนื่องจากการควบคุมความเร็วสอดคล้องกับกระแสไฟฟ้าที่กำหนดและกับฟลักซ์สนามแบบต่อเนื่องของมอเตอร์และฟลักซ์สนามจนถึงเมื่อได้ความเร็วที่กำหนด และเนื่องจากกำลังเป็นผลคูณของความเร็วและแรงบิดและมีสัดส่วนโดยตรงกับความเร็ว ด้วยสิ่งนี้เมื่อมีกำลังเพิ่มขึ้นความเร็วจะเพิ่มขึ้น
ทั้งสองวิธีที่กล่าวมาข้างต้นไม่สามารถให้การควบคุมความเร็วในช่วงที่ต้องการได้ ยิ่งไปกว่านั้นวิธีการควบคุมฟลักซ์อาจส่งผลต่อการสับเปลี่ยนในขณะที่วิธีการควบคุมกระดองเกี่ยวข้องกับการสูญเสียพลังงานอย่างมากเนื่องจากการใช้ตัวต้านทานแบบอนุกรมกับกระดอง ดังนั้นวิธีการที่แตกต่างกันมักเป็นที่ต้องการ - วิธีที่ควบคุมแรงดันไฟฟ้าเพื่อควบคุมความเร็วของมอเตอร์
ดังนั้นด้วยเทคนิค Ward Leonard ไดรฟ์กำลังที่ปรับได้และค่าคงที่ของแรงบิดจะได้มาจากระดับความเร็วต่ำสุดไปจนถึงระดับความเร็วพื้นฐาน เทคนิคการควบคุมฟลักซ์สนามส่วนใหญ่จะใช้เมื่อระดับความเร็วมากกว่าความเร็วพื้นฐาน
ในการทำงานกระแสกระดองจะถูกเก็บไว้ที่ระดับคงที่ตามค่าที่กำหนดและค่าแรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าจะคงที่ ในวิธีดังกล่าวขดลวดสนามจะได้รับแรงดันไฟฟ้าคงที่และกระดองจะได้รับแรงดันไฟฟ้าผันแปร
หนึ่งในเทคนิควิธีการควบคุมแรงดันไฟฟ้านั้นเกี่ยวข้องกับการใช้กลไกสวิตช์เพื่อให้แรงดันไฟฟ้าแปรผันไปยังกระดองและอีกวิธีหนึ่งใช้เครื่องกำเนิดไฟฟ้าที่ขับเคลื่อนด้วยมอเตอร์ AC เพื่อให้แรงดันไฟฟ้าผันแปรไปยังกระดอง ( ระบบ Ward-Leonard ).
ข้อดีและข้อเสียของวอร์ดลีโอนาร์ดเมโท d คือ:
ประโยชน์ของการใช้เทคนิค Ward Leonard สำหรับการควบคุมความเร็วมอเตอร์กระแสตรงมีดังนี้:
- ทั้งสองทิศทางสามารถควบคุมความเร็วของอุปกรณ์ได้อย่างราบรื่นสำหรับช่วงขยาย
- เทคนิคนี้มีความสามารถในการเบรกที่แท้จริง
- โวลต์ - แอมแปร์ปฏิกิริยาต่อท้ายจะถูกถ่วงดุลผ่านไดรฟ์และมอเตอร์ซิงโครนัสที่ตื่นเต้นอย่างกว้างขวางจะทำหน้าที่เป็นไดรฟ์ดังนั้นจะมีตัวประกอบกำลังเพิ่มขึ้น
- เมื่อมีโหลดกระพริบแสดงว่ามอเตอร์ขับเคลื่อนคือ มอเตอร์เหนี่ยวนำ มีมู่เล่ซึ่งใช้เพื่อลดภาระการกะพริบให้เหลือน้อยที่สุด
ข้อเสียของเทคนิค Ward Leonard คือ:
- เนื่องจากเทคนิคนี้มีชุดมอเตอร์และเครื่องกำเนิดไฟฟ้าจึงมีค่าใช้จ่ายมากขึ้น
- อุปกรณ์มีความซับซ้อนในการออกแบบและมีน้ำหนักมากด้วย
- ต้องการพื้นที่ในการติดตั้งมากขึ้น
- ต้องบำรุงรักษาเป็นประจำและรองพื้นไม่คุ้มทุน
- จะมีการสูญเสียมากและประสิทธิภาพของระบบจึงลดลง
- มีเสียงรบกวนมากขึ้น
และ การประยุกต์ใช้วิธีการของ Ward Leonard คือการควบคุมความเร็วในมอเตอร์กระแสตรงอย่างราบรื่น ตัวอย่างบางส่วน ได้แก่ รอกเหมืองโรงงานกระดาษลิฟท์โรงรีดและเครน
นอกเหนือจากสองเทคนิคนี้แล้วเทคนิคที่ใช้กันอย่างแพร่หลายคือ การควบคุมความเร็วของมอเตอร์กระแสตรงโดยใช้ PWM เพื่อให้เกิดการควบคุมความเร็วของมอเตอร์กระแสตรง PWM เกี่ยวข้องกับการใช้พัลส์ความกว้างที่แตกต่างกันกับตัวขับมอเตอร์เพื่อควบคุมแรงดันไฟฟ้าที่ใช้กับมอเตอร์ วิธีนี้พิสูจน์ได้ว่ามีประสิทธิภาพมากเนื่องจากการสูญเสียพลังงานจะอยู่ในระดับต่ำสุดและไม่เกี่ยวข้องกับการใช้อุปกรณ์ที่ซับซ้อนใด ๆ

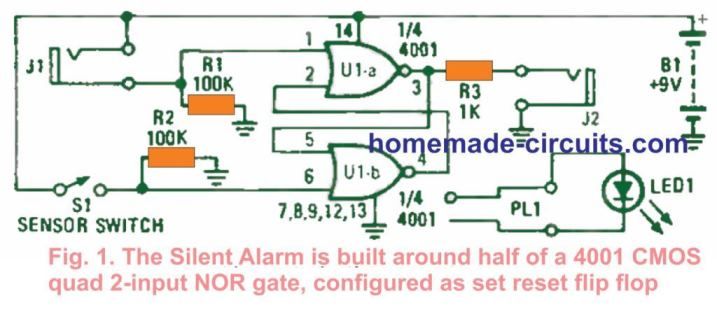
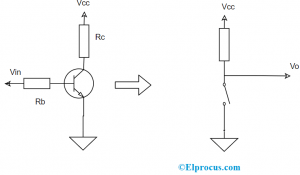
วิธีการควบคุมแรงดันไฟฟ้า
แผนภาพบล็อกด้านบนแสดงถึงความเรียบง่าย ตัวควบคุมความเร็วมอเตอร์ไฟฟ้า . ดังที่แสดงในแผนภาพบล็อกด้านบนไมโครคอนโทรลเลอร์ถูกใช้เพื่อป้อนสัญญาณ PWM ไปยังไดรเวอร์มอเตอร์ ตัวขับมอเตอร์เป็นไอซี L293D ซึ่งประกอบด้วยวงจร H-bridge เพื่อขับเคลื่อนมอเตอร์
PWM ทำได้โดยการเปลี่ยนพัลส์ที่ใช้กับพินเปิดใช้งานของ IC ไดรเวอร์มอเตอร์เพื่อควบคุมแรงดันไฟฟ้าที่ใช้ของมอเตอร์ การแปรผันของพัลส์ทำได้โดยไมโครคอนโทรลเลอร์โดยมีสัญญาณอินพุตจากปุ่มกด ที่นี่มีปุ่มกดสองปุ่มแต่ละปุ่มเพื่อลดและเพิ่มรอบการทำงานของพัลส์
ดังนั้นบทความนี้จึงให้คำอธิบายโดยละเอียดเกี่ยวกับเทคนิคต่างๆของการควบคุมความเร็วมอเตอร์กระแสตรงและวิธีการควบคุมความเร็วเป็นสิ่งสำคัญที่สุดที่ต้องปฏิบัติ ขอแนะนำเพิ่มเติมเกี่ยวกับ ตัวควบคุมความเร็วมอเตอร์ 12v dc .