
Servo แสดงถึงข้อผิดพลาดในการตรวจจับการตอบรับการควบคุมซึ่งใช้เพื่อแก้ไขประสิทธิภาพของระบบ นอกจากนี้ยังต้องใช้คอนโทรลเลอร์ที่ซับซ้อนโดยทั่วไปซึ่งมักจะเป็นโมดูลเฉพาะที่ออกแบบมาโดยเฉพาะสำหรับใช้กับเซอร์โวมอเตอร์ เซอร์โวมอเตอร์เป็นมอเตอร์กระแสตรงที่ช่วยให้สามารถควบคุมตำแหน่งเชิงมุมได้อย่างแม่นยำ เป็นมอเตอร์กระแสตรงซึ่งเกียร์จะลดความเร็วลงอย่างช้าๆ เซอร์โวมอเตอร์มักจะตัดการปฏิวัติจาก 90 °ถึง 180 ° เซอร์โวมอเตอร์บางตัวยังมีการปฏิวัติการตัด 360 °ขึ้นไป แต่เซอร์โวมอเตอร์ไม่หมุนตลอดเวลา การหมุนของพวกเขาถูก จำกัด ระหว่างมุมคงที่
เซอร์โวมอเตอร์เป็นส่วนประกอบสี่อย่าง ได้แก่ มอเตอร์กระแสตรงปกติชุดลดเกียร์อุปกรณ์ตรวจจับตำแหน่งและวงจรควบคุม มอเตอร์กระแสตรง เชื่อมต่อกับกลไกเกียร์ที่ให้ข้อมูลย้อนกลับไปยังเซ็นเซอร์ตำแหน่งซึ่งส่วนใหญ่เป็นโพเทนชิออมิเตอร์ จากกระปุกเกียร์เอาต์พุตของมอเตอร์จะถูกส่งผ่านเซอร์โว spline ไปยังแขนเซอร์โว สำหรับเซอร์โวมอเตอร์มาตรฐานโดยปกติเกียร์จะประกอบด้วยพลาสติกในขณะที่สำหรับเซอร์โวกำลังสูงเฟืองจะประกอบด้วยโลหะ
เซอร์โวมอเตอร์ประกอบด้วยสายไฟสามสายคือสายสีดำที่เชื่อมต่อกับพื้น, สายสีขาว / เหลืองที่เชื่อมต่อกับชุดควบคุมและสายสีแดงที่เชื่อมต่อกับแหล่งจ่ายไฟ
ฟังก์ชั่นของเซอร์โวมอเตอร์คือรับสัญญาณควบคุมที่แสดงตำแหน่งเอาต์พุตที่ต้องการของเพลาเซอร์โวและใช้พลังงานไปยังมอเตอร์กระแสตรงจนกระทั่งเพลาหมุนไปที่ตำแหน่งนั้น
ใช้อุปกรณ์ตรวจจับตำแหน่งเพื่อหาตำแหน่งการหมุนของเพลาดังนั้นจึงรู้ว่ามอเตอร์ต้องหมุนไปทางใดเพื่อเคลื่อนเพลาไปยังตำแหน่งที่ได้รับคำแนะนำ โดยทั่วไปแล้วเพลาจะไม่หมุนอย่างอิสระรอบ ๆ คล้ายกับมอเตอร์กระแสตรง แต่สามารถหมุนได้เพียง 200 องศา

เซอร์โวมอเตอร์
จากตำแหน่งของโรเตอร์สนามแม่เหล็กหมุนจะถูกสร้างขึ้นเพื่อสร้างแรงบิดอย่างมีประสิทธิภาพ กระแสไหลในขดลวดเพื่อสร้างสนามแม่เหล็กหมุน เพลาส่งกำลังขับมอเตอร์ โหลดถูกขับเคลื่อนผ่านกลไกการถ่ายโอน ดินหายากที่มีฟังก์ชั่นสูงหรือแม่เหล็กถาวรอื่น ๆ วางอยู่ภายนอกกับเพลา ตัวเข้ารหัสแบบออปติคัลจะเฝ้าดูจำนวนการหมุนและตำแหน่งของเพลาเสมอ
การทำงานของเซอร์โวมอเตอร์
เซอร์โวมอเตอร์ประกอบด้วยมอเตอร์กระแสตรงระบบเกียร์เซ็นเซอร์ตำแหน่งและวงจรควบคุม มอเตอร์กระแสตรงได้รับพลังงานจากแบตเตอรี่และทำงานด้วยความเร็วสูงและแรงบิดต่ำ . ชุดเกียร์และเพลาที่เชื่อมต่อกับมอเตอร์กระแสตรงจะลดความเร็วลงเป็นความเร็วที่เพียงพอและแรงบิดที่สูงขึ้น เซ็นเซอร์ตำแหน่งจะตรวจจับตำแหน่งของเพลาจากตำแหน่งที่แน่นอนและป้อนข้อมูลไปยังวงจรควบคุม วงจรควบคุมจะถอดรหัสสัญญาณจากเซ็นเซอร์ตำแหน่งและเปรียบเทียบตำแหน่งจริงของมอเตอร์กับตำแหน่งที่ต้องการและควบคุมทิศทางการหมุนของมอเตอร์กระแสตรงเพื่อให้ได้ตำแหน่งที่ต้องการ เซอร์โวมอเตอร์โดยทั่วไปต้องการแหล่งจ่ายไฟ DC 4.8V ถึง 6 V.
การควบคุมเซอร์โวมอเตอร์
เซอร์โวมอเตอร์ถูกควบคุมโดยการควบคุมตำแหน่งโดยใช้เทคนิคการมอดูเลตความกว้างพัลส์ ความกว้างของพัลส์ที่ใช้กับมอเตอร์นั้นแตกต่างกันไปและส่งไปตามระยะเวลาที่กำหนด
ความกว้างของพัลส์กำหนดตำแหน่งเชิงมุมของเซอร์โวมอเตอร์ ตัวอย่างเช่นความกว้างของพัลส์ 1 มิลลิวินาทีทำให้เกิดตำแหน่งเชิงมุม 0 องศาในขณะที่ความกว้างพัลส์ 2 มิลลิวินาทีทำให้เกิดความกว้างเชิงมุม 180 องศา
ข้อดี:
- หากมีภาระหนักวางอยู่บนมอเตอร์ไดรเวอร์จะเพิ่มกระแสไปยังขดลวดของมอเตอร์ขณะที่พยายามหมุนมอเตอร์ ไม่มีเงื่อนไขนอกขั้นตอน
- สามารถใช้งานความเร็วสูงได้
ข้อเสีย:
- เนื่องจากเซอร์โวมอเตอร์พยายามหมุนตามพัลส์คำสั่ง แต่ล่าช้าจึงไม่เหมาะสำหรับการควบคุมการหมุนอย่างแม่นยำ
- ต้นทุนที่สูงขึ้น
- เมื่อหยุดทำงานโรเตอร์ของมอเตอร์จะยังคงเคลื่อนที่ไปมาหนึ่งพัลส์ดังนั้นจึงไม่เหมาะหากคุณต้องการป้องกันการสั่นสะเทือน
7 การใช้งานเซอร์โวมอเตอร์
เซอร์โวมอเตอร์ถูกใช้ในการใช้งานที่ต้องการความเร็วที่เปลี่ยนแปลงอย่างรวดเร็วโดยที่มอเตอร์ไม่ร้อนเกินไป
- ในอุตสาหกรรมพวกเขาใช้ในเครื่องมือเครื่องจักรบรรจุภัณฑ์ระบบอัตโนมัติในโรงงานการจัดการวัสดุการแปลงการพิมพ์สายการประกอบและการใช้งานอื่น ๆ อีกมากมายหุ่นยนต์เครื่องจักร CNC หรือการผลิตอัตโนมัติ
- นอกจากนี้ยังใช้ในเครื่องบินบังคับวิทยุเพื่อควบคุมตำแหน่งและการเคลื่อนที่ของลิฟต์
- พวกมันถูกใช้ในหุ่นยนต์เนื่องจากการเปิดปิดที่ราบรื่นและการกำหนดตำแหน่งที่แม่นยำ
- นอกจากนี้ยังใช้ในอุตสาหกรรมการบินและอวกาศเพื่อรักษาของเหลวไฮดรอลิกในระบบไฮดรอลิก
- ใช้ในของเล่นที่ควบคุมด้วยวิทยุหลายชนิด
- ใช้ในอุปกรณ์อิเล็กทรอนิกส์เช่นดีวีดีหรือเครื่องเล่นบลูเรย์ดิสก์เพื่อขยายหรือเล่นถาดดิสก์ซ้ำ
- นอกจากนี้ยังใช้ในรถยนต์เพื่อรักษาความเร็วของยานพาหนะ
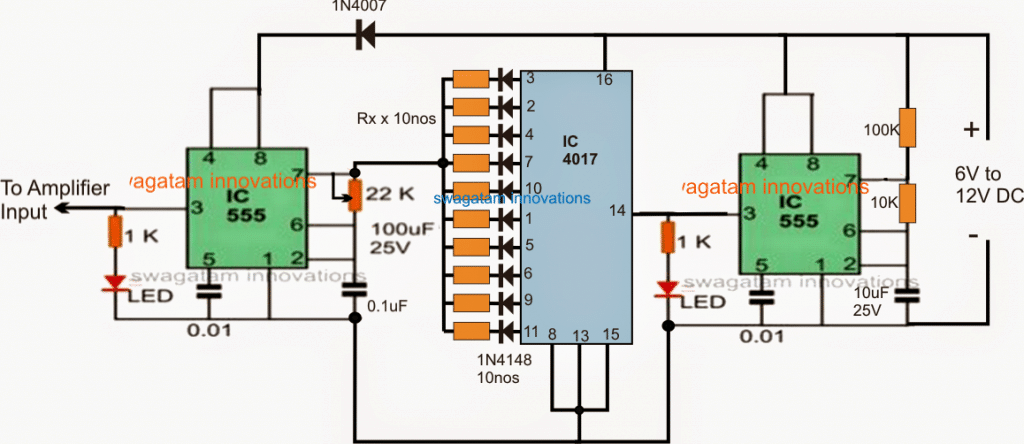
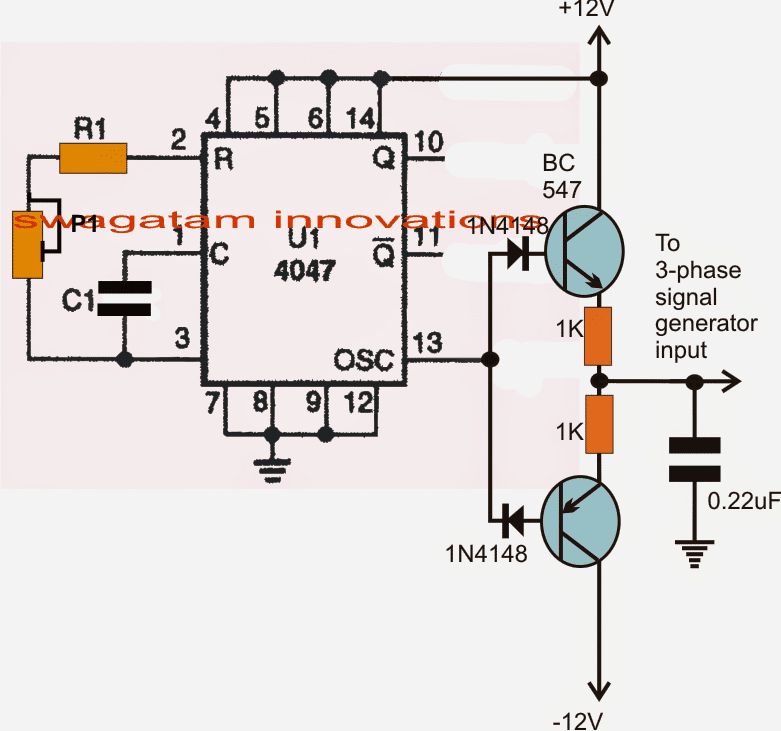
วงจรการใช้งานของเซอร์โวมอเตอร์
จากวงจรการใช้งานด้านล่าง: มอเตอร์แต่ละตัวมีอินพุตสามตัว: VCC กราวด์และสัญญาณคลื่นสี่เหลี่ยมเป็นระยะ ความกว้างพัลส์ของคลื่นสี่เหลี่ยมกำหนดความเร็วและทิศทางของเซอร์โวมอเตอร์ ในกรณีของเราเราต้องเปลี่ยนทิศทางเพื่อให้อุปกรณ์เคลื่อนที่ไปข้างหน้าถอยหลังและเลี้ยวซ้ายและขวา หากความกว้างของพัลส์อยู่ภายใต้กรอบเวลาที่กำหนดมอเตอร์จะขับเคลื่อนไปในทิศทางตามเข็มนาฬิกา หากความกว้างของพัลส์เกินกรอบเวลานั้นมอเตอร์จะขับเคลื่อนไปในทิศทางทวนเข็มนาฬิกา กรอบเวลากลางสามารถปรับได้ผ่านโพเทนชิออมิเตอร์ในตัวภายในมอเตอร์

3 ความแตกต่างระหว่าง Stepper Motor และ Servo Motor:
- Stepper Motors มีเสาจำนวนมากคู่แม่เหล็กที่สร้างโดยแม่เหล็กถาวรหรือกระแสไฟฟ้า เซอร์โวมอเตอร์มีเสาน้อยมากแต่ละขั้วมีจุดหยุดตามธรรมชาติสำหรับเพลามอเตอร์
- แรงบิดของสเต็ปเปอร์มอเตอร์ที่ความเร็วต่ำมากกว่าเซอร์โวมอเตอร์ที่มีขนาดเท่ากัน
- การทำงานของมอเตอร์สเต็ปเปอร์ถูกซิงโครไนซ์โดยสัญญาณพัลส์คำสั่งที่ส่งออกจากเครื่องกำเนิดพัลส์ ในทางตรงกันข้ามการทำงานของเซอร์โวมอเตอร์จะล่าช้าหลังพัลส์คำสั่ง
ตอนนี้คุณมีความคิดเกี่ยวกับการทำงานของเซอร์โวมิเตอร์แล้วหากคุณมีข้อสงสัยเกี่ยวกับหัวข้อนี้หรือโครงการไฟฟ้าและอิเล็กทรอนิกส์แสดงความคิดเห็นด้านล่าง
เครดิตภาพ
- เซอร์โวมอเตอร์โดย วิกิมีเดีย







{kind=link}