PIR Sensor คืออะไร?
เซ็นเซอร์ PIR ตรวจจับมนุษย์ที่เคลื่อนที่ไปรอบ ๆ ภายในระยะประมาณ 10 เมตรจากเซ็นเซอร์ ค่านี้เป็นค่าเฉลี่ยเนื่องจากช่วงการตรวจจับจริงอยู่ระหว่าง 5 ม. ถึง 12 ม. PIR ทำโดยพื้นฐานจากเซ็นเซอร์ไฟฟ้าไพโรซึ่งสามารถตรวจจับระดับของรังสีอินฟราเรดได้ สำหรับโครงการหรือสิ่งของที่จำเป็นจำนวนมากที่ต้องค้นพบเมื่อบุคคลออกไปหรือเข้ามาในพื้นที่ เซ็นเซอร์ PIR นั้นยอดเยี่ยมมากพวกเขาควบคุมได้อย่างราบเรียบและใช้ความพยายามน้อยที่สุดมีช่วงเลนส์กว้างและง่ายต่อการเชื่อมต่อ

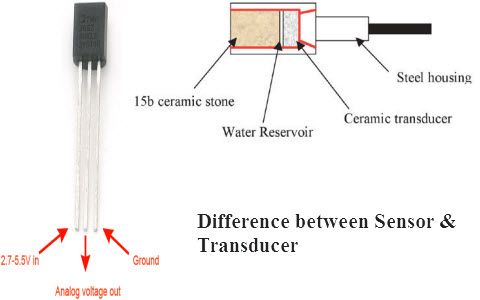
เซ็นเซอร์ PIR
เซ็นเซอร์ PIR ส่วนใหญ่มีการเชื่อมต่อแบบ 3 พินที่ด้านข้างหรือด้านล่าง พินหนึ่งจะกราวด์อีกอันจะเป็นสัญญาณและพินสุดท้ายจะเป็นพลังงาน โดยปกติพลังงานจะสูงถึง 5V บางครั้งโมดูลที่ใหญ่กว่าจะไม่มีเอาต์พุตโดยตรง แต่ใช้รีเลย์แทนซึ่งในกรณีนี้มีกราวด์กำลังและการเชื่อมโยงสวิตช์ทั้งสอง การเชื่อมต่อ PIR กับไมโครคอนโทรลเลอร์ทำได้ง่ายและสะดวก PIR ทำหน้าที่เป็นเอาต์พุตดิจิตอลดังนั้นสิ่งที่คุณต้องทำคือฟังเพื่อให้พินพลิกสูงหรือต่ำ สามารถตรวจจับการเคลื่อนไหวได้โดยตรวจสอบสัญญาณสูงบนพิน I / O เดียว เมื่อเซ็นเซอร์อุ่นขึ้นผลลัพธ์จะยังคงอยู่ในระดับต่ำจนกว่าจะมีการเคลื่อนไหวซึ่งในเวลานั้นเอาต์พุตจะแกว่งสูงเป็นเวลาสองสามวินาทีจากนั้นจึงกลับมาต่ำ หากการเคลื่อนไหวยังคงดำเนินต่อไปเอาต์พุตจะหมุนเวียนในลักษณะนี้จนกว่าเซ็นเซอร์จะหยุดการมองเห็นอีกครั้ง เซ็นเซอร์ PIR ต้องการเวลาอุ่นเครื่องโดยมีเป้าหมายเฉพาะเพื่อความจุที่เหมาะสม นี่เป็นเพราะเวลาที่ตกตะกอนรวมอยู่ในการศึกษาโดเมนของธรรมชาติ อาจเป็นได้ทุกที่ตั้งแต่ 10-60 วินาที
ตลอดเวลานี้ควรมีการเคลื่อนไหวเพียงเล็กน้อยเท่าที่จะคาดได้ในมุมมองของเซ็นเซอร์
วิดีโอเกี่ยวกับ PIR Sensor
ต่อไปนี้เป็นวิดีโอเกี่ยวกับเซ็นเซอร์ PIR
การใช้งานเซนเซอร์ PIR 7 ด้าน
- ไฟกลางแจ้งทั้งหมด
- ลิฟท์ล็อบบี้
- คอมเพล็กซ์อพาร์ตเมนต์หลายห้อง
- บันไดทั่วไป
- สำหรับชั้นใต้ดินหรือที่จอดรถในร่ม
- ห้างสรรพสินค้า
- สำหรับไฟสวน
5 คุณสมบัติ
- สมบูรณ์ด้วย PIR การตรวจจับการเคลื่อนไหว
- เซ็นเซอร์องค์ประกอบคู่ที่มีเสียงรบกวนต่ำและความไวแสงสูง
- การจ่ายแรงดัน - 5V
- ปรับเวลาล่าช้าได้
- เอาต์พุต TTL มาตรฐาน
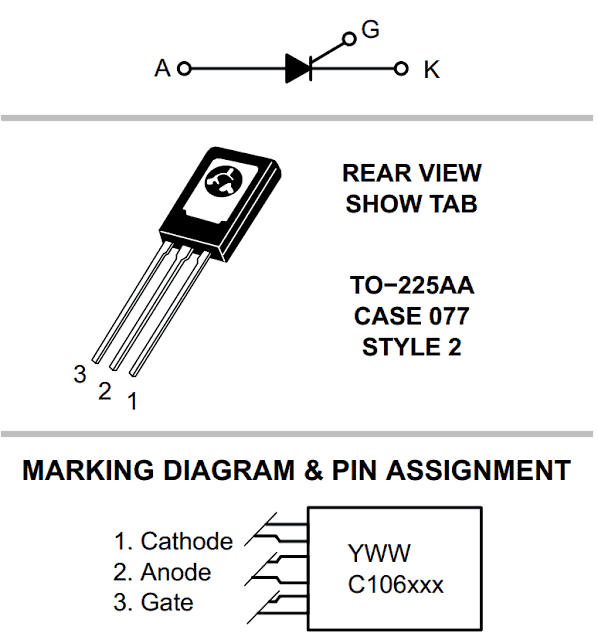
PIR เซนเซอร์ IC
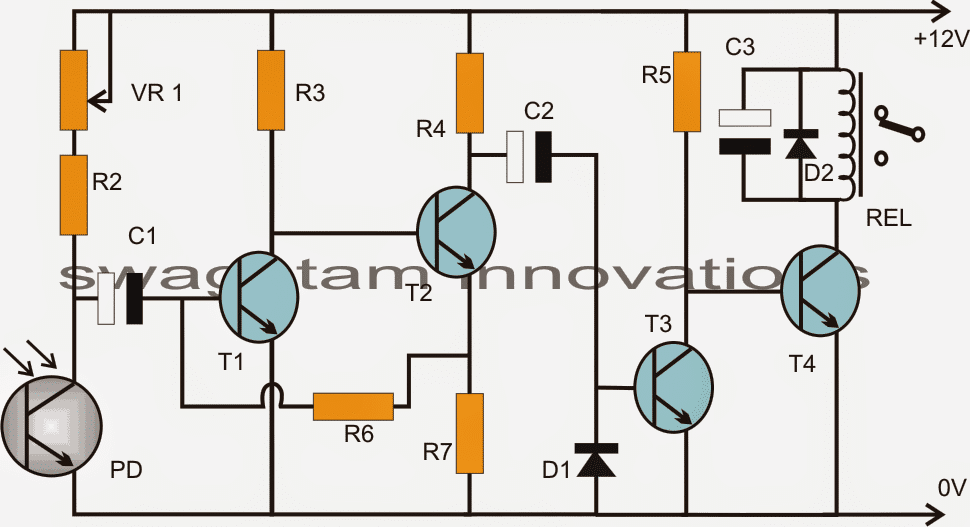
IC เซ็นเซอร์ PIR ประกอบด้วย 3 พิน - Vcc, กราวด์และเอาต์พุต

 เมื่อมีการแผ่รังสี IR ของมนุษย์เซ็นเซอร์จะตรวจจับการแผ่รังสีและแปลงเป็นพัลส์ไฟฟ้าโดยตรงซึ่งป้อนเข้าสู่วงจรอินเวอร์เตอร์ วงจรอินเวอร์เตอร์ประกอบด้วยทรานซิสเตอร์ซึ่งเข้าสู่ความอิ่มตัวด้วยการใช้กระแสไฟฟ้าฐานสูงและในที่สุดก็พัฒนาแรงดันไฟฟ้าสะสมต่ำ ดังนั้นเอาต์พุตทรานซิสเตอร์จึงต่ำ
เมื่อมีการแผ่รังสี IR ของมนุษย์เซ็นเซอร์จะตรวจจับการแผ่รังสีและแปลงเป็นพัลส์ไฟฟ้าโดยตรงซึ่งป้อนเข้าสู่วงจรอินเวอร์เตอร์ วงจรอินเวอร์เตอร์ประกอบด้วยทรานซิสเตอร์ซึ่งเข้าสู่ความอิ่มตัวด้วยการใช้กระแสไฟฟ้าฐานสูงและในที่สุดก็พัฒนาแรงดันไฟฟ้าสะสมต่ำ ดังนั้นเอาต์พุตทรานซิสเตอร์จึงต่ำ
เอาต์พุตอินเวอร์เตอร์ต่ำนี้เชื่อมต่อกับไมโครคอนโทรลเลอร์ ขึ้นอยู่กับอินพุตที่ได้รับจากไมโครคอนโทรลเลอร์จะควบคุมไดรเวอร์มอเตอร์ซึ่งจะควบคุมการเคลื่อนที่ของมอเตอร์
การตรวจจับความเคลื่อนไหวโดยใช้ PIR Sensor
PIR หรือ Passive Infrared Sensor สามารถใช้เพื่อตรวจจับการมีอยู่ของมนุษย์ในบริเวณใกล้เคียง เอาต์พุตสามารถใช้เพื่อควบคุมการเคลื่อนที่ของประตู
โดยทั่วไปการตรวจจับการเคลื่อนไหวใช้เซ็นเซอร์แสงเพื่อตรวจจับการมีอยู่ของแสงอินฟราเรดที่ปล่อยออกมาจากวัตถุที่อบอุ่นหรือไม่มีแสงอินฟราเรดเมื่อวัตถุขัดจังหวะลำแสงที่ปล่อยออกมาจากส่วนอื่นของอุปกรณ์
เซ็นเซอร์ PIR ตรวจจับแสงอินฟราเรดที่แผ่ออกมาจากวัตถุอุ่น ประกอบด้วยเซ็นเซอร์ไฟฟ้าไพโรซึ่งนำการเปลี่ยนแปลงของอุณหภูมิ (เนื่องจากรังสีอินฟราเรดตกกระทบ) เป็นสัญญาณไฟฟ้า เมื่อแสงอินฟราเรดกระทบกับคริสตัลจะสร้างประจุไฟฟ้า
ดังนั้นเซ็นเซอร์ PIR จึงสามารถใช้เพื่อตรวจจับการมีอยู่ของมนุษย์ภายในพื้นที่ตรวจจับประมาณ 14 เมตร
การประยุกต์ใช้ PIR Sensor - ระบบเปิดประตูอัตโนมัติ
การเปิดและปิดประตูเป็นงานที่น่าเบื่อเสมอโดยเฉพาะอย่างยิ่งในสถานที่ต่างๆเช่นห้างสรรพสินค้าโรงแรมและโรงละครที่ต้องเปิดประตูให้ผู้มาเยือนเสมอ

อัน ระบบเปิดประตูอัตโนมัติ ประกอบด้วยเซ็นเซอร์ pr ที่ตรวจจับการมีอยู่ของมนุษย์และส่งพัลส์ไปยังไมโครคอนโทรลเลอร์ซึ่งควบคุมไดรเวอร์มอเตอร์โดยส่งพัลส์ที่เหมาะสมไปยังพินอินพุตและเปิดใช้งานพิน
โดยทั่วไปร่างกายของมนุษย์จะปล่อยพลังงานอินฟราเรดซึ่งเซ็นเซอร์ PIR รับรู้ได้จากระยะไกล เอาต์พุตจากเซ็นเซอร์ PIR เช่นเครื่องตรวจจับอินฟราเรดแบบพาสซีฟถูกขยายไปยังทรานซิสเตอร์ BC547 ซึ่งเอาต์พุตที่ตัวเก็บรวบรวมเชื่อมต่อกับพิน 1 ของไมโครคอนโทรลเลอร์ ในขณะที่วัตถุเคลื่อนไหวใด ๆ ถูกตรวจจับโดย PIR แต่จะพัฒนาลอจิกสูงที่เอาต์พุตซึ่งจะถูกทรานซิสเตอร์กลับด้านที่ใช้ในการพัฒนาลอจิกต่ำที่พิน 1 ของไมโครคอนโทรลเลอร์ ดังนั้นไมโครคอนโทรลเลอร์จึงได้รับสัญญาณลอจิกต่ำจากเซ็นเซอร์ pr ผ่านทรานซิสเตอร์และผ่านการเขียนโปรแกรมที่เหมาะสมส่งลอจิกต่ำไปยังพิน 2 และลอจิกสูงถึงพิน 7 ทำให้มอเตอร์ทำงานในทิศทางไปข้างหน้าและประตูเชื่อมต่อกับเพลาของ มอเตอร์เปิดขึ้น โปรแกรมเขียนขึ้นเพื่อให้ส่งอินพุตที่เหมาะสมไปยัง IC ไดรเวอร์มอเตอร์ L293D ตามที่อธิบายไว้ข้างต้นเพื่อให้มอเตอร์ทำงานในทิศทางเดียวเพื่อเปิดใช้งานสถานการณ์ที่เปิดประตู เมื่อประตูเปิดเต็มที่สัญญาณขัดจังหวะจะได้รับจากประตูมอเตอร์จากสวิตช์ใบ SPDT เพื่อหยุดการทำงานของมอเตอร์โดยวางศูนย์ลอจิกเมื่อประตูถึงปลายสุดเพื่อเปิดใช้งานพินของ L293D เพื่อปิดการทำงานของมอเตอร์
กล่าวอีกนัยหนึ่งสัญญาณปัจจุบันจากสวิตช์ spdt จะส่งสัญญาณขัดจังหวะไปยังไมโครคอนโทรลเลอร์และจะส่งเอาต์พุตของลอจิกต่ำไปยังอินพุตพินที่เปิดใช้งานของไอซีมอเตอร์ซึ่งจะทำให้มอเตอร์หยุดทำงาน หลังจากนั้นไม่กี่วินาทีไมโครคอนโทรลเลอร์จะส่งลอจิกย้อนกลับไปยัง IC ไดรเวอร์ของมอเตอร์เพื่อให้มอเตอร์หมุนไปในทิศทางตรงกันข้ามซึ่งแสดงถึงการปิดประตู สิ่งนี้เกิดขึ้นเมื่อไมโครคอนโทรลเลอร์ส่งลอจิกต่ำไปยังพิน 2 และลอจิกสูงไปที่พิน 7 และมอเตอร์จะกลับทิศทางและประตูจะปิดโดยอัตโนมัติ เหตุการณ์นี้เกิดขึ้นไม่กี่วินาทีหลังจากที่บุคคลนั้นข้ามเส้นทางประตู ดังนั้นประตูจึงสามารถปิดหรือเปิดได้โดยอัตโนมัติเมื่อมีคนเข้าใกล้หรือออกจากประตู
เครดิตภาพ:
- PIR เซนเซอร์ IC วิศวกร


![วงจรตรวจจับเฟส AC แบบไม่สัมผัส [ทดสอบแล้ว]](https://electronics.jf-parede.pt/img/sensors-detectors/38/non-contact-ac-phase-detector-circuit.png)