โพสต์นี้อธิบายถึงวงจรสตาร์ทอ่อนของมอเตอร์ PWM ที่มีประสิทธิภาพซึ่งสามารถใช้สำหรับการเปิดใช้งานมอเตอร์ขนาดใหญ่ด้วยการสตาร์ทแบบนุ่มนวลและป้องกันไม่ให้อุปกรณ์ดึงกระแสไฟสูงที่เป็นอันตราย
ทำไมต้องเริ่มต้นอย่างนุ่มนวล
มอเตอร์กำลังวัตต์สูงเช่น มอเตอร์ปั๊ม หรือมอเตอร์อุตสาหกรรมหนักรูปแบบอื่น ๆ มักจะดึงกระแสไฟฟ้าจำนวนมากในระหว่างการเปิดสวิตช์เปิดเครื่องครั้งแรกซึ่งจะส่งผลกระทบต่อฟิวส์และสวิตช์ที่เกี่ยวข้องในทางลบทำให้สิ่งเหล่านี้ระเบิดหรือลดการทำงานล่วงเวลา เพื่อแก้ไขสถานการณ์วงจรสตาร์ทแบบซอฟต์สตาร์ทมีความจำเป็นอย่างยิ่ง
ในบทความก่อนหน้าของฉันบางส่วนเราได้พูดคุยเกี่ยวกับหัวข้อที่เกี่ยวข้องซึ่งคุณสามารถเรียนรู้ได้อย่างครอบคลุมผ่านโพสต์ต่อไปนี้:
วงจรสตาร์ทอ่อนสำหรับมอเตอร์ปั๊ม
วงจรสตาร์ทอ่อนสำหรับตู้เย็น
แม้ว่าการออกแบบข้างต้นจะมีประโยชน์มาก แต่สิ่งเหล่านี้อาจถือได้ว่าเป็นเทคโนโลยีที่ต่ำเล็กน้อยเมื่อใช้แนวทางของพวกเขา
ในบทความนี้เราจะมาดูกันว่าขั้นตอนนี้จะดำเนินการได้อย่างไรโดยใช้ขั้นตอนที่ซับซ้อนมาก มอเตอร์ที่ใช้ PWM วงจรควบคุมเริ่มต้นอ่อน
ใช้แนวคิด PWM
แนวคิดในที่นี้คือการใช้ PWM ที่เพิ่มขึ้นทีละน้อยกับมอเตอร์ทุกครั้งที่เปิดเครื่องการกระทำนี้จะช่วยให้มอเตอร์บรรลุความเร็วที่เพิ่มขึ้นเชิงเส้นจากศูนย์ถึงสูงสุดภายในระยะเวลาที่กำหนดซึ่งอาจปรับเปลี่ยนได้

หมายเหตุ: โปรดใช้การกำหนดค่า Darlington BC547 ที่พิน # 5 ของ IC2 แทน BC547 เดียว สิ่งนี้จะให้การตอบสนองที่มีประสิทธิภาพมากขึ้นเมื่อเทียบกับ BC547 เดียว
ตัวอย่างวงจรสำหรับตัวควบคุมมอเตอร์ 48V ที่มีการสตาร์ทแบบนุ่มนวล

## โปรดเชื่อมต่อ 1K จาก PIN5 ของ IC2 ไปยังกราวด์ซึ่งจะไม่ปรากฏในการออกแบบด้านบน ##
มันทำงานอย่างไร
จากรูปด้านบนการผลิต PWM ที่เพิ่มขึ้นเชิงเส้นสามารถทำได้ด้วยความช่วยเหลือของ 555 IC สองตัวซึ่งกำหนดค่าในโหมด PWM มาตรฐาน
ฉันได้กล่าวถึงแนวคิดนี้อย่างละเอียดแล้วในบทความก่อนหน้านี้ที่อธิบาย วิธีใช้ IC 555 สำหรับสร้าง PWM
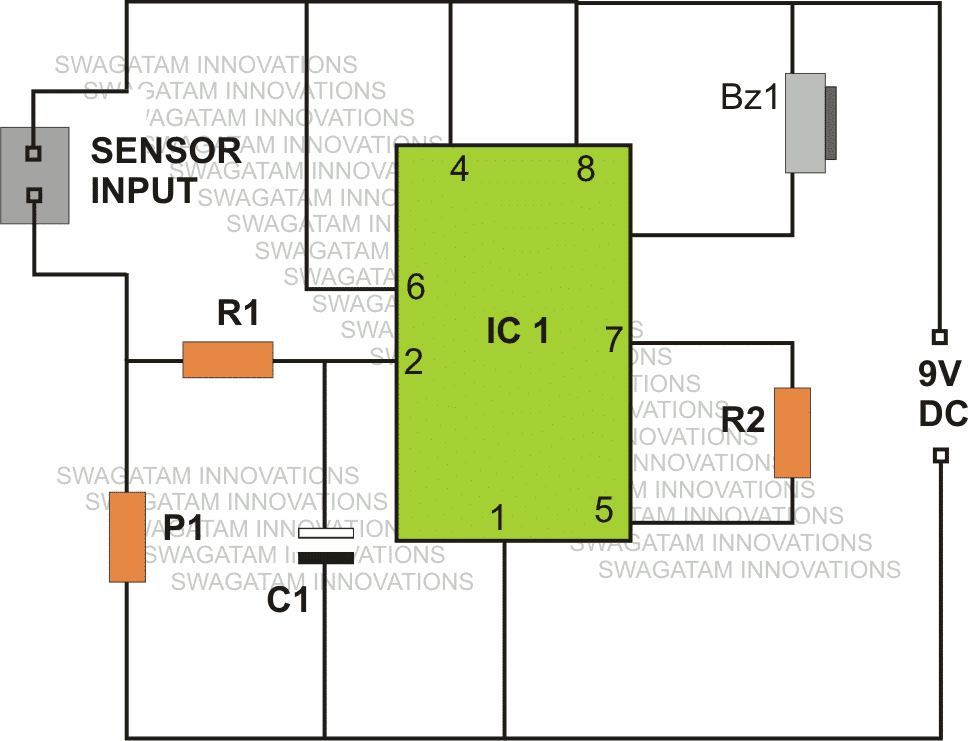
ตามที่เห็นในแผนภาพการกำหนดค่าใช้ IC 555 สองตัว IC1 ต่อสายเหมือน Astable ในขณะที่ IC2 เป็นตัวเปรียบเทียบ
IC1 สร้างสัญญาณนาฬิกาที่ต้องการในความถี่ที่กำหนด (กำหนดโดยค่าของ R1 และ C2) ซึ่งใช้กับพิน # 2 ของ IC2
IC2 ใช้สัญญาณนาฬิกาเพื่อสร้างคลื่นสามเหลี่ยมบนพิน # 7 เพื่อให้สามารถเปรียบเทียบสิ่งเหล่านี้กับศักยภาพที่มีอยู่ที่พินแรงดันไฟฟ้าควบคุม # 5
Pin # 5 รับแรงดันไฟฟ้าควบคุมที่ต้องการผ่าน NPN เวทีผู้ติดตามตัวปล่อย ทำด้วยความช่วยเหลือของ T2 และส่วนประกอบที่เกี่ยวข้อง
เมื่อเปิดเครื่อง T2 จะถูกป้อนด้วยทางลาดหรือแรงดันไฟฟ้าที่ค่อยๆเพิ่มขึ้นที่ฐานผ่าน R9 และเนื่องจากการชาร์จตามสัดส่วนของ C5
ศักย์ทางลาดนี้ซ้ำกันอย่างเหมาะสมในตัวปล่อยของ T2 เมื่อเทียบกับแรงดันไฟฟ้าที่ตัวเก็บรวบรวมซึ่งหมายความว่าข้อมูลพื้นฐานจะถูกแปลงเป็นศักยภาพที่เพิ่มขึ้นทีละน้อยตั้งแต่ศูนย์ไปจนถึงระดับแรงดันไฟฟ้าของแหล่งจ่าย
แรงดันทางลาดนี้ที่ขา # 5 ของ IC 2 จะถูกเปรียบเทียบทันทีกับคลื่นสามเหลี่ยมที่มีอยู่ในพิน # 7 ของ IC2 ซึ่งแปลเป็น PWM ที่เพิ่มขึ้นเชิงเส้นที่ขา # 3 ของ IC2
กระบวนการเพิ่มขึ้นเชิงเส้นของ PWM จะดำเนินต่อไปจนกว่า C5 จะชาร์จเต็มและฐานของ T2 จะมีระดับแรงดันไฟฟ้าที่คงที่
การออกแบบข้างต้นจะดูแลการสร้าง PWM ทุกครั้งที่เปิดเครื่อง
คลิปวิดีโอ:
วิดีโอต่อไปนี้แสดงผลการทดสอบในทางปฏิบัติของวงจร PWM ข้างต้นที่ใช้กับมอเตอร์กระแสตรง 24 โวลต์ วิดีโอแสดงการตอบสนองต่อการปรับหม้อ PWM ของวงจรบนมอเตอร์และยังมีไฟ LED แสดงสถานะแบตเตอรี่เพิ่มเติม มอเตอร์เปิดและปิด .
การผสานรวม Zero Crossing Triac Controller
เพื่อที่จะใช้มอเตอร์ PWM ผลของวงจรเริ่มต้นอ่อน ต้องใช้เอาต์พุตจากพิน # 3 ของ IC2 กับวงจรขับกำลังไตรแอกดังที่แสดงด้านล่าง:

ภาพด้านบนแสดงให้เห็นว่าการควบคุม PWM ของสวิตช์เปิดแบบซอฟต์สตาร์ทอาจถูกนำไปใช้กับมอเตอร์ขนาดใหญ่ตามวัตถุประสงค์ที่ตั้งใจไว้ได้อย่างไร
ในภาพด้านบนเราจะเห็นว่าสามารถใช้ตัวแยกไดรเวอร์ Triac ที่มีเครื่องตรวจจับการข้ามศูนย์ได้อย่างไรในการขับเคลื่อนมอเตอร์ด้วย PWM ที่เพิ่มขึ้นเชิงเส้นเพื่อดำเนินการเอฟเฟกต์การสตาร์ทแบบนุ่มนวล
แนวคิดข้างต้นดูแลการเริ่มต้นอย่างมีประสิทธิภาพในการกำหนดกระแสเกินบนมอเตอร์เฟสเดียว
อย่างไรก็ตามในกรณีที่ใช้มอเตอร์ 3 เฟสสามารถใช้แนวคิดต่อไปนี้สำหรับการติดตั้งซอฟต์สตาร์ท 3 เฟสที่เสนอบนมอเตอร์

ก่อนหน้านี้: ไฟ LED ขึ้น / ลงโดยใช้ LM3915 ถัดไป: วิธีสร้างวงจรป้องกันสุนัขเห่าโดยใช้การตรวจจับความถี่สูง