มอเตอร์หัวเกียร์ DC ทั่วไปต้องการกระแสที่สูงกว่า 250mA มีวงจรรวมมากมายเช่น ATmega16 ไมโครคอนโทรลเลอร์ , IC จับเวลา 555 . แต่ IC 74 series ไม่สามารถจ่ายกระแสไฟฟ้าจำนวนนี้ได้ เมื่อมอเตอร์เชื่อมต่อโดยตรงกับ o / p ของ IC ด้านบนแล้วอาจเกิดความเสียหายได้ เพื่อแก้ไขปัญหานี้จำเป็นต้องใช้วงจรควบคุมมอเตอร์ซึ่งสามารถทำหน้าที่เป็นสะพานเชื่อมระหว่างมอเตอร์และไอซีด้านบน ( วงจรรวม ). มีหลายวิธีในการสร้างวงจรควบคุมมอเตอร์สะพาน H เช่นการใช้ทรานซิสเตอร์รีเลย์และการใช้ L293D / L298

วงจรควบคุมมอเตอร์สะพาน H โดยใช้ L293d IC
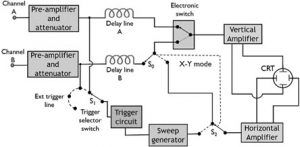
วงจร H-Bridge
สะพาน H เป็นวงจรอิเล็กทรอนิกส์ที่อนุญาตให้ใช้แรงดันไฟฟ้ากับโหลดในทิศทางใดก็ได้ วงจร H-bridge มักใช้ในหุ่นยนต์และแอพพลิเคชั่นอื่น ๆ อีกมากมายเพื่อให้มอเตอร์กระแสตรงทำงานไปข้างหน้าและถอยหลังได้ วงจรควบคุมมอเตอร์เหล่านี้ส่วนใหญ่จะใช้ในตัวแปลงที่แตกต่างกันเช่นตัวแปลง DC-DC, DC-AC, AC-AC และประเภทอื่น ๆ อีกมากมาย ตัวแปลงไฟฟ้ากำลัง . โดยเฉพาะมอเตอร์สเต็ปเปอร์สองขั้วจะขับเคลื่อนด้วยตัวควบคุมมอเตอร์ที่มีสะพาน H สองตัวเสมอ

วงจร H-Bridge
สะพาน H ถูกประดิษฐ์ขึ้นด้วย สี่สวิตช์ เช่น S1, S2, S3 และ S4 เมื่อปิดสวิตช์ S1 และ S4 แรงดันไฟฟ้า + ve จะถูกนำไปใช้กับมอเตอร์ ด้วยการเปิดสวิตช์ S1 และ S4 และปิดสวิตช์ S2 และ S3 แรงดันไฟฟ้านี้จะกลับด้านทำให้การทำงานของมอเตอร์กลับด้าน
โดยทั่วไปวงจรขับมอเตอร์ H-bridge จะใช้เพื่อกลับทิศทางของมอเตอร์และทำให้มอเตอร์แตกด้วย เมื่อมอเตอร์หยุดกะทันหันเนื่องจากขั้วของมอเตอร์สั้นลง หรือปล่อยให้มอเตอร์ทำงานอย่างอิสระจนหยุดเมื่อมอเตอร์หลุดจากวงจร ตารางด้านล่างแสดงการทำงานที่แตกต่างกันด้วยสวิตช์สี่ตัวที่ตรงกับวงจรข้างต้น

การทำงานของสะพาน H
L293D IC ขับมอเตอร์
L293D IC เป็น IC ไดรเวอร์มอเตอร์ทั่วไปซึ่งอนุญาตให้ มอเตอร์กระแสตรง ขับเคลื่อนไปในทิศทางใดก็ได้ IC นี้ประกอบด้วย 16 พินซึ่งใช้ในการควบคุมชุดมอเตอร์กระแสตรงสองตัวในทันทีในทิศทางใดก็ได้ หมายความว่าด้วยการใช้ L293D IC เราสามารถควบคุมมอเตอร์กระแสตรงสองตัวได้ เช่นกัน IC นี้สามารถขับเคลื่อนมอเตอร์ขนาดเล็กและเงียบได้
L293D IC นี้ทำงานบนหลักการพื้นฐานของ H-bridge สิ่งนี้ การควบคุมมอเตอร์ วงจรช่วยให้แรงดันไฟฟ้าไหลไปในทิศทางใดก็ได้ ดังที่เราทราบว่าแรงดันไฟฟ้าจะต้องเปลี่ยนทิศทางจึงจะสามารถหมุนมอเตอร์กระแสตรงได้ทั้งสองทิศทาง ดังนั้นวงจร H-bridge ที่ใช้ L293D ICs จึงเหมาะอย่างยิ่งสำหรับการขับเคลื่อนมอเตอร์ Single L293D IC ประกอบด้วยวงจร H-bridge สองตัวภายในซึ่งสามารถหมุนมอเตอร์ DC สองตัวแยกกันได้ โดยทั่วไปแล้ววงจรเหล่านี้จะใช้ในหุ่นยนต์เนื่องจากมีขนาดสำหรับควบคุมมอเตอร์กระแสตรง
พินไดอะแกรมของคอนโทรลเลอร์ IC ไดรเวอร์มอเตอร์ L293D

L293D IC Pin Configuration
- Pin-1 (เปิดใช้งาน 1-2): เมื่อพินเปิดใช้งานอยู่สูงส่วนด้านซ้ายของ IC จะทำงานไม่เช่นนั้นจะไม่ทำงาน พินนี้เรียกอีกอย่างว่าพินควบคุมหลัก
- Pin-2 (อินพุต -1): เมื่อขาอินพุตสูงการไหลของกระแสจะผ่านเอาต์พุต 1
- Pin-3 (เอาต์พุต -1): ขาเอาต์พุต -1 นี้ต้องเชื่อมต่อกับขั้วใดขั้วหนึ่งของมอเตอร์
- Pin4 & 5: หมุดเหล่านี้เป็นหมุดกราวด์
- Pin-6 (เอาต์พุต -2): พินนี้ต้องเชื่อมต่อกับขั้วใดขั้วหนึ่งของมอเตอร์
- Pin-7 (อินพุต -2): เมื่อพินนี้สูงการไหลของกระแสจะเป็นเอาต์พุต 2
- Pin-8 (Vcc2): นี่คือพินแรงดันไฟฟ้าที่ใช้จ่ายแรงดันไฟฟ้าให้กับมอเตอร์
- Pin-16 (Vss): พินนี้เป็นแหล่งจ่ายไฟไปยังวงจรรวม
- Pin-15 (อินพุต -4): เมื่อพินนี้สูงการไหลของกระแสจะผ่านเอาต์พุต -4
- Pin-14 (เอาต์พุต -4): พินนี้ต้องเชื่อมต่อกับขั้วใดขั้วหนึ่งของมอเตอร์
- Pin-12 & 13: หมุดเหล่านี้เป็นหมุดกราวด์
- Pin-11 (เอาต์พุต -3): พินนี้ต้องเชื่อมต่อกับขั้วใดขั้วหนึ่งของมอเตอร์
- Pin-10 (Input-3): เมื่อพินนี้สูงการไหลของกระแสจะผ่านเอาท์พุท -3
- Pin-9 (Enable3-4): เมื่อพินนี้อยู่สูงส่วนด้านขวาของ IC จะทำงานและเมื่ออยู่ต่ำส่วนด้านขวาของ IC จะไม่ทำงาน พินนี้เรียกว่าเป็นพินควบคุมหลักสำหรับส่วนด้านขวาของ IC
วงจรควบคุมมอเตอร์สะพาน H โดยใช้ L293d IC
IC LM293D ประกอบด้วยพิน 4-i / p โดยที่พิน 2 และ 7 ทางด้านซ้ายของ IC และพิน 10 และ 15 ทางด้านขวาของ IC หมุดอินพุตด้านซ้ายบน IC จะควบคุมการหมุนของมอเตอร์ ที่นี่มอเตอร์เชื่อมต่อด้านข้างและ i / p ด้านขวาสำหรับมอเตอร์ทางด้านขวามือ มอเตอร์นี้จะหมุนตาม i / ps ที่เราให้ไว้บนพินอินพุตเป็น Logic 0 และ Logic 1

วงจรมอเตอร์ H-bridge พร้อม L293D IC
ลองพิจารณาเมื่อมอเตอร์เชื่อมต่อกับหมุด o / p 3 และ 6 ทางด้านซ้ายของ IC สำหรับการหมุนของมอเตอร์ในทิศทางตามเข็มนาฬิกาหมุด i / p จะต้องมี Logic 0 และ Logic 1
เมื่อ Pin-2 = ลอจิก 1 & pin-7 = ลอจิก 0 จากนั้นจะหมุนในทิศทางตามเข็มนาฬิกา
Pin-2 = ลอจิก 0 และ Pin7 = ลอจิก 1 จากนั้นจะหมุนในทิศทางต่อต้านนาฬิกา
Pin-2 = ลอจิก 0 & Pin7 = ลอจิก 0 จากนั้นจะไม่ได้ใช้งาน (สถานะอิมพีแดนซ์สูง)
Pin-2 = ลอจิก 1 & Pin7 = ลอจิก 1 จากนั้นไม่ได้ใช้งาน
ในทำนองเดียวกันมอเตอร์ยังสามารถทำงานข้ามอินพุตพิน -15 และพิน -10 สำหรับมอเตอร์ทางด้านขวามือ
IC ไดรเวอร์มอเตอร์ L4293D เกี่ยวข้องกับกระแสไฟฟ้าจำนวนมากด้วยเหตุนี้วงจรนี้จึงใช้ตัวระบายความร้อนเพื่อลดความร้อน ดังนั้นจึงมีพินกราวด์ 4 พินบน L293D IC เมื่อเราประสานพินเหล่านี้บน PCB (แผงวงจรพิมพ์) เราจะได้พื้นที่โลหะขนาดใหญ่ระหว่างพินกราวด์ที่สามารถผลิตความร้อนได้
ทั้งหมดนี้เป็นข้อมูลเกี่ยวกับ วงจรควบคุมมอเตอร์สะพาน H ใช้ L293d IC IC เหล่านี้มักใช้ในวิทยาการหุ่นยนต์ เราหวังว่าคุณจะมีความเข้าใจที่ดีขึ้นเกี่ยวกับแนวคิดของสะพาน H นอกจากนี้ข้อสงสัยใด ๆ เกี่ยวกับ IC ไดรเวอร์มอเตอร์บริดจ์ H l293d หรือ โครงการไฟฟ้าและอิเล็กทรอนิกส์ โปรดแสดงความคิดเห็นของคุณในส่วนความคิดเห็นด้านล่าง นี่คือคำถามสำหรับคุณจุดประสงค์ของ IC ไดรเวอร์ moor คืออะไร?