ในการประมวลผลสัญญาณดิจิทัล FIR คือตัวกรองที่มีการตอบสนองของอิมพัลส์เป็นระยะเวลา จำกัด ซึ่งเป็นผลมาจากการที่มันจะตกลงเป็นศูนย์ในเวลา จำกัด สิ่งนี้มักจะแตกต่างจากตัวกรอง IIR ซึ่งสามารถมีข้อเสนอแนะภายในและจะยังคงตอบกลับไปเรื่อย ๆ การตอบสนองแรงกระตุ้นของฟิลเตอร์ FIR แบบไม่ต่อเนื่องลำดับ N จะใช้ตัวอย่าง N + 1 อย่างแม่นยำก่อนที่มันจะตกลงเป็นศูนย์ ฟิลเตอร์ FIR คือ ตัวกรองยอดนิยม ดำเนินการในซอฟต์แวร์และตัวกรองเหล่านี้อาจเป็นเวลาต่อเนื่องอนาล็อกหรือดิจิตอลและเวลาไม่ต่อเนื่อง ฟิลเตอร์ FIR ชนิดพิเศษ ได้แก่ Boxcar, Hilbert Transformer, Differentiator, Lth-Band และ Raised-Cosine
FIR Filter คืออะไร?

คำย่อ FIR คือ“ Finite Impulse Response” และเป็นหนึ่งในสองประเภทหลักของตัวกรองดิจิทัลที่ใช้ในแอปพลิเคชัน DSP ฟิลเตอร์คือตัวปรับสัญญาณ และหน้าที่ของตัวกรองแต่ละตัวคืออนุญาตให้มีส่วนประกอบ AC และบล็อกส่วนประกอบ DC ตัวอย่างที่ดีที่สุดของตัวกรองคือสายโทรศัพท์ซึ่งทำหน้าที่เป็นตัวกรอง เพราะมัน จำกัด ความถี่ให้มีความโกรธน้อยกว่าช่วงที่มนุษย์สามารถได้ยินความถี่ได้
ฟิลเตอร์ FIR สำหรับการประมวลผลสัญญาณดิจิตอล
มีตัวกรองหลายประเภท ได้แก่ LPF, HPF, BPF, BSF LPF อนุญาตให้ส่งสัญญาณความถี่ต่ำผ่านทาง o / p เท่านั้นดังนั้นตัวกรองนี้จึงใช้เพื่อกำจัดความถี่สูง LPF สะดวกในการควบคุมช่วงความถี่สูงสุดในสัญญาณเสียง HPF ค่อนข้างตรงข้ามกับ LPF เนื่องจากปฏิเสธเฉพาะส่วนประกอบความถี่ที่ต่ำกว่าเกณฑ์บางส่วน ตัวอย่างที่ดีที่สุดของ HPF คือการตัดไฟ AC ที่ได้ยินได้ 60Hz ซึ่งสามารถเลือกเป็นสัญญาณรบกวนที่เกี่ยวข้องกับสัญญาณเกือบทุกชนิดในสหรัฐอเมริกา
ทางเลือกของฟิลเตอร์ IR คือฟิลเตอร์ DSP ซึ่งสามารถเป็น IIR ได้เช่นกัน ตัวกรอง IIR ใช้ข้อเสนอแนะดังนั้นเมื่อคุณมีแรงกระตุ้น o / p ในทางทฤษฎีจะดังตลอดไป คำศัพท์ที่ใช้อธิบายฟิลเตอร์ IR ได้แก่ Tap, การตอบสนองของอิมพัลส์, MAC (การสะสมแบบทวีคูณ), เส้นหน่วงเวลา, แถบการเปลี่ยนและบัฟเฟอร์แบบวงกลม
วิธีการออกแบบฟิลเตอร์ FIR
วิธีการออกแบบฟิลเตอร์ FIR ตามค่าประมาณของฟิลเตอร์ในอุดมคติ ตัวกรองที่ตามมาจะเข้าใกล้คุณลักษณะที่สมบูรณ์แบบเนื่องจากลำดับของตัวกรองจะเพิ่มขึ้นดังนั้นการสร้างตัวกรองและการใช้งานจึงมีความซับซ้อนมากขึ้น
ขั้นตอนการออกแบบเริ่มต้นด้วยความจำเป็นและข้อกำหนดของฟิลเตอร์ FIR วิธีการที่ใช้ในกระบวนการออกแบบตัวกรองขึ้นอยู่กับการใช้งานและข้อกำหนด มีข้อดีและข้อเสียของวิธีการออกแบบมากมาย ดังนั้นการเลือกวิธีการที่เหมาะสมสำหรับการออกแบบฟิลเตอร์ FIR จึงเป็นเรื่องสำคัญมาก เนื่องจากประสิทธิภาพและความเรียบง่ายของฟิลเตอร์ FIR จึงนิยมใช้วิธีหน้าต่างเป็นส่วนใหญ่ วิธีการสุ่มตัวอย่างความถี่วิธีอื่นนั้นใช้งานง่ายมาก แต่มีการลดทอนเล็กน้อยในแถบหยุด
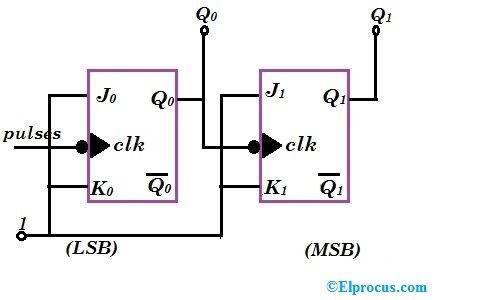
โครงสร้างลอจิกของฟิลเตอร์ FIR
ฟิลเตอร์ FIR ใช้เพื่อตอบสนองความถี่ดิจิทัลเกือบทุกประเภท โดยปกติแล้วตัวกรองเหล่านี้ได้รับการออกแบบให้มีตัวคูณตัวเพิ่มและชุดของความล่าช้าในการสร้างผลลัพธ์ของตัวกรอง รูปต่อไปนี้แสดงแผนภาพตัวกรอง FIR พื้นฐานที่มีความยาว N ผลของความล่าช้าดำเนินการกับตัวอย่างอินพุต ค่าของ hk คือค่าสัมประสิทธิ์ที่ใช้สำหรับการคูณ เพื่อให้ o / p ในแต่ละครั้งและนั่นคือผลรวมของตัวอย่างล่าช้าทั้งหมดคูณด้วยค่าสัมประสิทธิ์ที่เหมาะสม

โครงสร้างลอจิกของฟิลเตอร์ FIR
สามารถกำหนดการออกแบบตัวกรองได้ เนื่องจากเป็นขั้นตอนการเลือกความยาวและค่าสัมประสิทธิ์ของตัวกรอง ความตั้งใจคือการตั้งค่าพารามิเตอร์เพื่อให้พารามิเตอร์ที่ต้องการเช่นสต็อปแบนด์และพาสแบนด์จะให้ผลลัพธ์จากการรันฟิลเตอร์ วิศวกรส่วนใหญ่ใช้ซอฟต์แวร์ MATLAB ในการออกแบบตัวกรอง
โดยปกติแล้วตัวกรองจะถูกกำหนดโดยการตอบสนองต่อความถี่แยกต่างหาก ส่วนประกอบที่พบ สัญญาณ i / p การตอบสนองของตัวกรองแบ่งออกเป็นสามประเภทตามความถี่เช่นแถบหยุดแถบความถี่และแถบการเปลี่ยน การตอบสนองของพาสแบนด์คือผลกระทบของตัวกรองต่อส่วนประกอบความถี่ที่ส่งผ่านส่วนใหญ่ไม่ได้รับผลกระทบ
ความถี่ในสต็อปแบนด์ของตัวกรองนั้นลดลงอย่างมาก แถบการเปลี่ยนแปลงหมายถึงความถี่ที่อยู่ตรงกลางซึ่งอาจได้รับการลดลงบ้าง แต่ไม่ได้แยกออกจากสัญญาณ o / p โดยสิ้นเชิง
การตอบสนองความถี่ของฟิลเตอร์ FIR
พล็อตการตอบสนองความถี่ของฟิลเตอร์แสดงอยู่ด้านล่างโดยที่ωpคือความถี่สิ้นสุดของพาสแบนด์ωsคือความถี่เริ่มต้นของสต็อปแบนด์เช่นเดียวกับปริมาณการลดทอนในแถบหยุด ความถี่ b / n ωpและลดลงในแถบการเปลี่ยนแปลงและจะลดลงเหลือน้อยลงซึ่งเป็นการยืนยันว่าตัวกรองมีคุณสมบัติตรงตามข้อกำหนดที่ต้องการรวมถึงแบนด์วิดท์การเปลี่ยนการกระเพื่อมความยาวของตัวกรองและค่าสัมประสิทธิ์ ยิ่งฟิลเตอร์ยาวขึ้นก็จะสามารถปรับการตอบสนองได้ละเอียดมากขึ้น ด้วยความยาวและค่าสัมประสิทธิ์ N, float h [N] = {…………}, การใช้ตัวกรอง FIR นั้นค่อนข้างตรงไปตรงมา

การตอบสนองความถี่ของฟิลเตอร์ FIR
Z Transform ของ FIR Filter คือ
สำหรับฟิลเตอร์ N-tap FIR ที่มีค่าสัมประสิทธิ์ h (k) ดังนั้น o / p จะถูกกำหนดเป็น
y (n) = h (0) x (n) + h (1) x (n-1) + h (2) x (n-2) + ……… h (N-1) x (nN-1 )
การแปลง Z ของตัวกรองคือ
H (z) = h (0) z-0 + h (1) z-1 + h (2) z-2 + ……… h (N-1) z- (N-1) หรือ

ฟังก์ชั่นการถ่ายโอนของ FIR Filter

สูตรตอบสนองความถี่สำหรับฟิลเตอร์ FIR

DC Gain ของตัวกรอง FIR คือ
การประยุกต์ใช้ฟิลเตอร์ FIR ส่วนใหญ่เกี่ยวข้องกับการสื่อสารแบบดิจิทัลในช่วงความถี่กลางของเครื่องรับ ตัวอย่างเช่นวิทยุดิจิตอลรับและ แปลงสัญญาณแอนะล็อกเป็นความถี่กลางแล้วแปลงเป็นดิจิตอล ใช้กับตัวแปลงดิจิตอลเป็นอนาล็อก จากนั้นใช้การตอบสนองแรงกระตุ้น จำกัด เพื่อเลือกความถี่ที่ต้องการ ใช้ในวิทยุซอฟต์แวร์ซึ่งอนุญาตให้ใช้ตัวกรองที่ปรับเปลี่ยนได้ง่ายโดยมีการปฏิเสธที่ดีและไม่ต้องเปลี่ยนฮาร์ดแวร์
ดังนั้นนี่คือข้อมูลทั้งหมดเกี่ยวกับตัวกรอง FIR การออกแบบตัวกรอง FIR โครงสร้างเชิงตรรกะและการตอบสนองความถี่ของตัวกรอง FIR เราหวังว่าคุณจะเข้าใจแนวคิดนี้ดีขึ้น นอกจากนี้หากมีข้อสงสัยเกี่ยวกับหัวข้อและแอปพลิเคชันนี้โปรดให้ข้อเสนอแนะและความคิดเห็นของคุณในส่วนความคิดเห็นด้านล่าง นี่คือคำถามสำหรับคุณความแตกต่างระหว่างฟิลเตอร์ FIR และ IIR คืออะไร