วงจรอินเวอร์เตอร์คลื่นไซน์ดัดแปลงที่เรียบง่าย แต่มีความซับซ้อนสูงแสดงไว้ในโพสต์ต่อไปนี้ การใช้ PWM IC TL494 ไม่เพียง แต่ทำให้การออกแบบประหยัดมากด้วยจำนวนชิ้นส่วนเท่านั้น แต่ยังมีประสิทธิภาพและความแม่นยำสูงอีกด้วย
ใช้ TL494 สำหรับการออกแบบ
IC TL494 เป็นไอซี PWM เฉพาะ และได้รับการออกแบบมาอย่างดีเพื่อให้เหมาะกับวงจรทุกประเภทที่ต้องการเอาต์พุตแบบ PWM ที่แม่นยำ
ชิปมีคุณสมบัติที่จำเป็นทั้งหมดในตัวสำหรับการสร้าง PWM ที่แม่นยำซึ่งสามารถปรับแต่งได้ตามข้อกำหนดแอปพลิเคชันของผู้ใช้

ในที่นี้เราจะพูดถึงวงจรอินเวอร์เตอร์ไซน์เวฟที่ปรับเปลี่ยนตาม PWM ซึ่งรวม IC TL494 สำหรับการประมวลผล PWM ขั้นสูงที่จำเป็น
ตามรูปด้านบนฟังก์ชันพินต่างๆของ IC สำหรับการใช้งานอินเวอร์เตอร์ PWM สามารถเข้าใจได้ด้วยประเด็นต่อไปนี้:
ฟังก์ชัน Pinout ของ IC TL494
พิน # 10 และพิน # 9 เป็นสองเอาท์พุทของ IC ซึ่งจัดให้ทำงานควบคู่หรือในการกำหนดค่าขั้วโทเทมซึ่งหมายความว่าพินทั้งสองจะไม่เป็นบวกร่วมกัน แต่จะแกว่งสลับกันจากแรงดันไฟฟ้าบวกไปเป็นศูนย์นั่นคือเมื่อ พิน # 10 เป็นบวกพิน # 9 จะอ่านค่าเป็นศูนย์โวลต์และในทางกลับกัน
IC ถูกเปิดใช้งานเพื่อสร้างเอาต์พุตเสาโทเทมด้านบนโดยการเชื่อมโยงพิน # 13 กับพิน # 14 ซึ่งเป็นพินเอาต์พุตแรงดันอ้างอิงของ IC ที่ตั้งไว้ที่ + 5V
ดังนั้นตราบใดที่พิน # 13 ถูกยึดด้วยการอ้างอิง + 5V นี้จะช่วยให้ IC สร้างเอาต์พุตแบบสลับสลับกันได้อย่างไรก็ตามหากพิน # 13 ต่อสายดินเอาต์พุตของ IC จะถูกบังคับให้เปลี่ยนในโหมดขนาน (โหมดสิ้นสุดครั้งเดียว) หมายความว่าทั้งเอาต์พุต pin10 / 9 จะเริ่มสลับกันและไม่สลับกัน
Pin12 ของ IC คือขาจ่ายของ IC ซึ่งสามารถมองเห็นได้เชื่อมต่อกับแบตเตอรี่ผ่านตัวต้านทาน 10 โอห์มที่ลดลงซึ่งจะกรองการขัดขวางที่เป็นไปได้หรือสวิตช์เปิดไฟกระชากสำหรับ IC
พิน # 7 เป็นกราวด์หลักของ IC ในขณะที่พิน # 4 และพิน # 16 ต่อสายดินเพื่อวัตถุประสงค์บางประการ
Pin # 4 คือ DTC หรือพินควบคุมเวลาตายของ IC ซึ่งกำหนดเวลาตายหรือช่องว่างระหว่างช่วงเวลาเปิดสวิตช์ของเอาต์พุตทั้งสองของ IC
โดยค่าเริ่มต้นจะต้องเชื่อมต่อกับกราวด์เพื่อให้ IC สร้างช่วงเวลาขั้นต่ำสำหรับ 'เวลาตาย' อย่างไรก็ตามเพื่อให้ได้ช่วงเวลาตายที่สูงขึ้นพินเอาต์นี้สามารถจ่ายให้กับแรงดันไฟฟ้าภายนอกที่แตกต่างกันได้ตั้งแต่ 0 ถึง 3.3V ซึ่งช่วยให้เกิดการเชิงเส้น เวลาตายที่ควบคุมได้ตั้งแต่ 0 ถึง 100%
พิน # 5 และพิน # 6 คือพินความถี่ของ IC ซึ่งต้องเชื่อมต่อกับเครือข่าย Rt, Ct (ตัวต้านทาน, ตัวเก็บประจุ) ภายนอกสำหรับการตั้งค่าความถี่ที่ต้องการในพินเอาต์เอาต์พุตของ IC
ทั้งสองแบบสามารถเปลี่ยนแปลงได้สำหรับการปรับความถี่ที่ต้องการในวงจรอินเวอร์เตอร์ดัดแปลง PWM ที่เสนอเราใช้ตัวต้านทานแบบแปรผันเพื่อเปิดใช้งานแบบเดียวกัน อาจได้รับการปรับเพื่อให้ได้ความถี่ 50Hz หรือ 60Hz บนพิน 9/10 ของ IC ตามข้อกำหนดโดยผู้ใช้
IC TL 494 มีเครือข่าย opamp คู่ที่ตั้งค่าไว้ภายในเป็นวงจรขยายข้อผิดพลาดซึ่งอยู่ในตำแหน่งเพื่อแก้ไขและกำหนดขนาดรอบหน้าที่การสลับเอาต์พุตหรือ PWM ตามข้อกำหนดของแอปพลิเคชันเช่นเอาต์พุตจะสร้าง PWM ที่แม่นยำและทำให้มั่นใจได้ว่าการปรับแต่ง RMS ที่สมบูรณ์แบบสำหรับ ขั้นตอนการส่งออก
ฟังก์ชันเครื่องขยายข้อผิดพลาด
อินพุตของตัวขยายข้อผิดพลาดถูกกำหนดค่าระหว่างพิน 15 และพิน 16 สำหรับหนึ่งในแอมป์ข้อผิดพลาดและพิน 1 และพิน 2 สำหรับแอมพลิฟายเออร์ข้อผิดพลาดตัวที่สอง
โดยปกติจะใช้แอมพลิฟายเออร์ข้อผิดพลาดเพียงตัวเดียวสำหรับการตั้งค่า PWM อัตโนมัติที่นำเสนอและแอมป์ข้อผิดพลาดอื่น ๆ จะถูกเก็บไว้เฉยๆ
ดังที่เห็นในแผนภาพแอมป์ข้อผิดพลาดที่มีอินพุตที่พิน 15 และพิน 16 จะถูกแสดงผลไม่ใช้งานโดยการต่อกราวด์พิน 16 ที่ไม่กลับด้านและเชื่อมต่อพิน 15 ถึง + 5V กลับด้านด้วยพิน 14
ดังนั้นแอมป์ข้อผิดพลาดภายในที่เชื่อมโยงกับพินด้านบนจึงไม่ทำงาน
อย่างไรก็ตามแอมป์ข้อผิดพลาดที่มีพิน 1 และพิน 2 เป็นอินพุตถูกนำมาใช้อย่างมีประสิทธิภาพที่นี่สำหรับการดำเนินการแก้ไข PWM
รูปแสดงว่าพิน 1 ซึ่งเป็นอินพุทที่ไม่กลับด้านของแอมป์ข้อผิดพลาดเชื่อมต่อกับขาอ้างอิง 5V # 14 ผ่านตัวแบ่งศักย์ที่ปรับได้โดยใช้หม้อ
อินพุตกลับด้านเชื่อมต่อกับพิน 3 (พินป้อนกลับ) ของ IC ซึ่งเป็นเอาต์พุตของแอมป์ข้อผิดพลาดและเปิดใช้งานลูปป้อนกลับเพื่อสร้างพิน 1 ของ IC
การกำหนดค่า pin1 / 2/3 ด้านบนช่วยให้สามารถตั้งค่า PWM ของเอาต์พุตได้อย่างแม่นยำโดยการปรับขาหม้อ # 1
นี่เป็นการสรุปคำแนะนำในการใช้งาน pinout หลักสำหรับอินเวอร์เตอร์คลื่นไซน์ที่ได้รับการแก้ไขโดยใช้ IC TL494
ขั้นตอนกำลังขับของอินเวอร์เตอร์
ตอนนี้สำหรับสเตจกำลังเอาต์พุตเราสามารถมองเห็นมอสเฟ็ตสองสามตัวที่ใช้ขับเคลื่อนโดยบัฟเฟอร์ BJT push pull stage
ขั้นตอน BJT ช่วยให้มั่นใจได้ว่าแพลตฟอร์มสวิตชิ่งในอุดมคติสำหรับมอสเฟ็ตโดยการจัดเตรียมมอสเฟ็ตที่มีปัญหาการเหนี่ยวนำหลงทางน้อยที่สุดและการระบายความจุภายในของ fets อย่างรวดเร็ว ตัวต้านทานเกตแบบซีรีส์ป้องกันไม่ให้มีการเปลี่ยนแปลงชั่วคราวใด ๆ ที่พยายามเข้าสู่ fet ดังนั้นจึงมั่นใจได้ว่าการทำงานจะปลอดภัยและมีประสิทธิภาพอย่างสมบูรณ์
ท่อระบายน้ำ mosfet เชื่อมต่อกับหม้อแปลงไฟฟ้าซึ่งอาจเป็นหม้อแปลงเหล็กธรรมดาที่มีการกำหนดค่าหลักที่ 9-0-9V หากแบตเตอรี่อินเวอร์เตอร์ได้รับการจัดอันดับที่ 12V และรองอาจเป็น 220V หรือ 120V ตามข้อกำหนดของประเทศของผู้ใช้ .
โดยพื้นฐานแล้วพลังของอินเวอร์เตอร์จะพิจารณาจากกำลังไฟฟ้าของหม้อแปลงและความจุ AH ของแบตเตอรี่เราสามารถปรับเปลี่ยนพารามิเตอร์เหล่านี้ได้ตามทางเลือกของแต่ละบุคคล
ใช้ Ferrite Transformer
สำหรับการสร้างอินเวอร์เตอร์ไซน์เวฟ PWM ขนาดกะทัดรัดสามารถเปลี่ยนหม้อแปลงแกนเหล็กด้วยหม้อแปลงแกนเฟอร์ไรต์ รายละเอียดการคดเคี้ยวสำหรับสิ่งเดียวกันสามารถดูได้ด้านล่าง:
โดยใช้ลวดทองแดงเคลือบซุปเปอร์:
หลัก: ลม 5 x 5 หมุนก๊อกตรงกลางโดยใช้ 4 มม. (สองเส้น 2 มม. พันขนานกัน)
รอง: ลม 200 ถึง 300 รอบ 0.5 มม
แกนหลัก: แกน EE ที่เหมาะสมซึ่งจะสามารถรองรับขดลวดเหล่านี้ได้อย่างสะดวกสบาย
TL494 วงจรอินเวอร์เตอร์แบบเต็มสะพาน
การออกแบบต่อไปนี้สามารถใช้สำหรับการสร้างวงจรอินเวอร์เตอร์แบบสะพานเต็มหรือสะพาน H พร้อม IC TL 494

ดังที่เห็นได้การรวมกันของ p channel และ n channel mosfets ถูกใช้สำหรับการสร้างเครือข่ายบริดจ์แบบเต็มซึ่งทำให้สิ่งต่าง ๆ ค่อนข้างง่ายและหลีกเลี่ยงเครือข่ายตัวเก็บประจุ bootstrap ที่ซับซ้อนซึ่งโดยปกติแล้วจำเป็นสำหรับอินเวอร์เตอร์บริดจ์แบบเต็มที่มี mosfet เพียง n channel
อย่างไรก็ตามการผสมผสาน p channel mosfets ไว้ที่ด้านสูงและ n channel ที่ด้านต่ำทำให้การออกแบบมีแนวโน้มที่จะเกิดปัญหาในการยิงทะลุ
เพื่อหลีกเลี่ยงการยิงทะลุต้องมีเวลาตายที่เพียงพอด้วย IC TL 494 และป้องกันความเป็นไปได้ของสถานการณ์นี้
ประตู IC 4093 ใช้สำหรับรับประกันการแยกทั้งสองด้านที่สมบูรณ์แบบของการนำสะพานแบบเต็มและการสลับหม้อแปลงหลักอย่างถูกต้อง
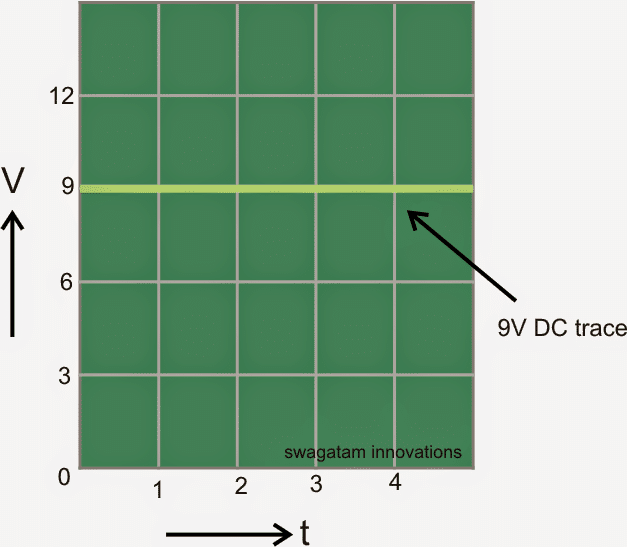
ผลการจำลอง

คู่ของ: วงจรลำโพงแอมพลิฟายเออร์ทริกเกอร์เพลง ถัดไป: วงจรชาร์จแบตเตอรี่พลังงานแสงอาทิตย์ PWM