ในโพสต์นี้เราจะพูดถึงพื้นฐานของการประกอบตัวเครื่อง quadcopter โดยใช้ท่ออลูมิเนียมและสลักเกลียวในส่วนต่อไปของบทความเราจะพูดถึงวงจรโดรนแบบง่ายซึ่งสามารถใช้สำหรับการบินประกอบโดรนขนาดเล็กโดยไม่ต้องขึ้นอยู่กับไมโครคอนโทรลเลอร์ที่ซับซ้อน
ควอดคอปเตอร์อาจเป็นเครื่องบินที่ง่ายที่สุดที่ต้องการความแม่นยำและความซับซ้อนของอากาศพลศาสตร์ขั้นต่ำดังนั้นจึงไม่น่าแปลกใจเลยที่มันจะได้รับความนิยมอย่างมากในหมู่นักเล่นอดิเรกต่างๆที่สามารถสร้างเครื่องนี้ได้สำเร็จ .... เครื่องที่พวกเขาบินได้จริงและ ควบคุมตามใจของตนเอง
Quadcopter Dynamics
ความจริงที่ว่าโดรนควอดคอปเตอร์นั้นง่ายที่สุดในแง่ของเทคนิคและพลวัตนั้นเกิดจากการมีส่วนร่วมของใบพัด 4 ตัวและโครงสร้างเฟรมที่สมดุลซึ่งทำให้เครื่องบินได้ด้วยความสมดุลที่ค่อนข้างดีแม้ในสภาพอากาศที่ยากลำบาก
แต่ความเรียบง่ายยังแสดงให้เห็นว่าระบบอาจไม่มีประสิทธิภาพเท่ากับเครื่องบินและรุ่นชอปเปอร์ทั่วไปซึ่งได้รับการออกแบบมาอย่างประณีตเพื่อแสดงประสิทธิภาพสูงสุดในแง่ของความเร็วและการสิ้นเปลืองน้ำมันเชื้อเพลิงและแน่นอนความสามารถในการรับน้ำหนัก ... ขาดในระบบ quadcopter ทั่วไป
อย่างไรก็ตามเท่าที่เกี่ยวข้องกับโครงการงานอดิเรกเครื่องนี้กลายเป็นตัวเลือกที่เหมาะสำหรับผู้ที่ชื่นชอบส่วนใหญ่ที่พบว่ามันน่าขบขันและน่าสนใจในการสร้างเครื่องบินด้วยตัวเองที่บ้านซึ่งท้ายที่สุดแล้ว 'รับฟัง' และบินไปยังทิศทางใดก็ได้ ผู้ใช้ต้องการให้ย้าย
อย่างไรก็ตามสำหรับผู้เล่นใหม่ที่อาจไม่ทราบในทางเทคนิคอาจพบว่าแม้แต่เครื่องง่ายๆนี้ยังมีความซับซ้อนในการทำความเข้าใจเพียงเพราะข้อมูลที่เกี่ยวข้องส่วนใหญ่ที่นำเสนอในเว็บไซต์หลายแห่งไม่สามารถพูดถึงแนวคิดได้อย่างชัดเจนและเป็น 'ภาษา' นั้น อาจเหมาะกับคนธรรมดา
บทความนี้เขียนขึ้นโดยเฉพาะสำหรับนักเทคนิคที่ไม่ค่อยมีความสนใจที่จะสร้างเครื่องบินที่สวยงาม แต่พบว่าหัวข้อนั้นยากเกินกว่าจะย่อยได้
ทำไม Quadcopters จึงสร้างได้ง่ายในปัจจุบัน
คุณเคยสงสัยหรือไม่ว่าทำไมควอดคอปเตอร์และโดรนจึงสร้างได้ง่ายในโลกปัจจุบันและอาจเป็นไปไม่ได้ที่จะใช้ไฟฟ้ามาก่อน
โดยพื้นฐานแล้วเป็นเพราะการพัฒนาและเพิ่มประสิทธิภาพของแบตเตอรี่ Li-Ion แบตเตอรี่เหล่านี้เป็นรูปแบบที่มีประสิทธิภาพสูงในปัจจุบันซึ่งมีอัตราส่วนกำลังต่อน้ำหนักที่น่าประทับใจ นอกจากนี้การประดิษฐ์มอเตอร์ BLDC และมอเตอร์แม่เหล็กถาวรที่มีความละเอียดสูงก็มีส่วนในการสร้างโดรนได้อย่างง่ายดาย
แบตเตอรี่ Li-Ion สามารถให้แรงบิดในการหมุนของมอเตอร์ในปริมาณที่ยอดเยี่ยมซึ่งเพียงพอที่จะผลักดันหน่วยควอดคอปเตอร์ไปที่ระดับความสูงเหนือพื้นดินได้ภายในไม่กี่วินาทีและยังช่วยให้อากาศถ่ายเทได้เป็นเวลานาน ประสิทธิภาพมีประสิทธิภาพและมีประโยชน์มาก
Quadcopter บินได้อย่างไร
ตอนนี้เรามาดูวิธีที่ถูกต้องและทำความเข้าใจว่าอะไรคือสิ่งสำคัญที่จำเป็นในการทำให้ quadcopter บินได้สำเร็จ พื้นฐานในการทำให้เครื่องบินได้อย่างราบรื่น:


1) โดยทั่วไปเครื่องต้องมีร่างกายที่มั่นคงและแข็งแรง แต่น้ำหนักเบามาก สิ่งนี้สามารถประดิษฐ์หรือประกอบได้โดยใช้ท่ออัดขึ้นรูปอลูมิเนียมสี่เหลี่ยมกลวงโดยการเจาะรูและยึดโครงด้วยน็อตและสลักเกลียว
2) โครงสร้างควรอยู่ในรูปของ '+' ที่สมบูรณ์แบบหรือ 'x' ที่สมบูรณ์แบบซึ่งจะไม่สร้างความแตกต่างตราบใดที่มุมระหว่างท่อ 'ข้าม' อยู่ที่ 90 องศา

องค์ประกอบพื้นฐานที่จำเป็นสำหรับการสร้าง quadcopter สามารถเห็นได้ในภาพต่อไปนี้:

การจำลองการประกอบชิ้นส่วน
การจำลองภาพเคลื่อนไหวคร่าวๆด้านล่างแสดงให้เห็นถึงวิธีการประกอบองค์ประกอบที่แสดงด้านบนเข้าด้วยกัน:

วิธีการสร้าง Quadcopter Framework
อลูมิเนียมสำหรับเฟรม '+' สามารถหาได้จากการตัดและปรับขนาดท่ออัดรีดอลูมิเนียมสำเร็จรูปตามที่แสดงด้านล่าง:

ขนาดของเฟรมมีความสัมพันธ์กันดังนั้นจึงไม่สำคัญคุณสามารถสร้างเฟรมที่กว้างโดยติดตั้งมอเตอร์ให้ห่างกันหรือสร้างโครงสร้างเฟรมที่ค่อนข้างกะทัดรัดโดยที่มอเตอร์ไม่กว้างเกินไป ... แม้ว่าจะต้องมั่นใจว่า ใบพัดอยู่ห่างจากกันเพื่อให้สมดุลและสมดุลดีขึ้น
3) โครงสร้างเฟรม '+' ต้องติดตั้งกับแท่นสี่เหลี่ยมที่ส่วนตรงกลางซึ่งแขนของเฟรมจะบรรจบกันและไขว้กัน อาจเป็นเพียงแผ่นอลูมิเนียมขัดเงาอย่างดีที่มีขนาดเหมาะสมเพื่อรองรับอุปกรณ์อิเล็กทรอนิกส์และสายไฟที่จำเป็นทั้งหมดได้อย่างสะดวกสบาย
ดังนั้นแผ่นกลางหรือแพลตฟอร์มนี้จึงจำเป็นโดยทั่วไปสำหรับการติดตั้งและจัดวางอุปกรณ์อิเล็กทรอนิกส์ของระบบซึ่งท้ายที่สุดจะรับผิดชอบในการควบคุม quadcopter ของคุณ
4) เมื่อกรอบข้างต้นเสร็จสมบูรณ์แล้วมอเตอร์จะต้องติดตั้งที่ปลายของไม้กางเขนดังที่แสดงในรูปด้านบน
5) ไม่จำเป็นต้องบอกว่างานประกอบทั้งหมดต้องทำด้วยความแม่นยำสูงสุดและการจัดตำแหน่งที่สมบูรณ์แบบซึ่งอาจต้องอาศัยความสัมพันธ์ของผู้ผลิตที่มีประสบการณ์สำหรับงานนั้น ๆ
เนื่องจากทุกอย่างในการออกแบบเป็นคู่การจัดวางองค์ประกอบให้ถูกต้องจึงไม่ยากเกินไป แต่เพียงแค่การปรับขนาดและการปรับขนาดให้เหมาะสมกับคู่ที่มีความคล้ายคลึงกันมากที่สุดซึ่งจะช่วยให้มั่นใจได้ถึงระดับความสมดุลสมดุลและการซิงค์สูงสุด สำหรับระบบ
เมื่อสร้างเฟรมเวิร์กแล้วก็ถึงเวลารวมวงจรอิเล็กทรอนิกส์กับมอเตอร์ที่เกี่ยวข้อง สิ่งนี้จะต้องทำตามคำแนะนำที่ให้ไว้ในคู่มือวงจรที่กำหนด
แผงวงจรสามารถติดตั้งที่ด้านล่างของแผ่นกลางโดยมีตัวเรือนที่เหมาะสมหรือทับแผ่นอีกครั้งโดยใช้ตู้ที่เหมาะสมสำหรับปิดให้แน่น

การทำความเข้าใจทิศทางการหมุนของใบพัด
การวิเคราะห์ทิศทางการหมุนของใบพัดมอเตอร์สำหรับ Balanced Lift-of:
อ้างอิงถึงการจำลองภาพเคลื่อนไหวข้างต้นทิศทางการหมุนของใบพัดมอเตอร์ควรจัดตำแหน่งในลักษณะต่อไปนี้:
เพียงแค่ต้องเป็นเช่นนั้นมอเตอร์ที่ปลายแกนหนึ่งควรจะเหมือนกัน แต่แตกต่างจากทิศทางของมอเตอร์แกนอื่นซึ่งหมายความว่าถ้าแกนหนึ่งมีมอเตอร์หมุนในทิศทางตามเข็มนาฬิกาจากนั้นมอเตอร์จะอยู่ที่ปลายของส่วนเสริมอื่น ๆ ต้องปรับก้านให้หมุนทวนเข็มนาฬิกา ทิศทาง.
โปรดดูการจำลองด้านบนเพื่อทำความเข้าใจอย่างถูกต้องเกี่ยวกับการเคลื่อนที่ของมอเตอร์ที่อาจจำเป็นต้องกำหนดให้กับมอเตอร์เพื่อให้แน่ใจว่าได้รับความสมดุล
วิธีการควบคุมทิศทางของ quadcopter โดยการควบคุมความเร็วของมอเตอร์
ใช่ทิศทางการบินของ quadcopter สามารถปรับแต่งและควบคุมได้ตามความต้องการของคุณเองและเพียงแค่ใช้ความเร็วที่แตกต่างกัน (RPM) กับมอเตอร์ที่เกี่ยวข้อง
ภาพต่อไปนี้แสดงให้เห็นว่าการส่งความเร็วพื้นฐานอาจนำไปใช้กับมอเตอร์ที่เกี่ยวข้องเพื่อให้บรรลุและดำเนินการทิศทางการบินที่ต้องการไปยังเครื่องได้อย่างไร:




ตามที่ระบุไว้ในแผนภาพด้านบนโดยการลดความเร็วของชุดมอเตอร์อย่างเหมาะสมหรือเพิ่มความเร็วของมอเตอร์ชุดตรงข้ามหรือปรับความเร็วตามความต้องการของตัวเอง quadcopter สามารถเคลื่อนที่ไปในอากาศได้ ทิศทางเฉพาะที่ต้องการ
ภาพด้านบนระบุทิศทางพื้นฐานเช่นเดินหน้าถอยหลังขวาซ้าย ฯลฯ อย่างไรก็ตามทิศทางแปลก ๆ อื่น ๆ ยังสามารถใช้งานได้อย่างมีประสิทธิภาพโดยการปรับความเร็วของมอเตอร์ที่เกี่ยวข้องอย่างเหมาะสมหรืออาจเป็นเพียงมอเตอร์ตัวเดียว
ตัวอย่างเช่นเพื่อบังคับให้เครื่องบินไปยังทิศทาง N / W ความเร็วของมอเตอร์ S / E เท่านั้นที่อาจเพิ่มขึ้นและสำหรับการทำให้เครื่องบินไปในทิศทาง N / E ความเร็วของ S / มอเตอร์ W อาจเพิ่มขึ้น ... และอื่น ๆ เพียงแค่ต้องได้รับการฝึกฝนจนกว่าผู้ใช้จะสามารถควบคุม quadcopter ได้อย่างสมบูรณ์และเชี่ยวชาญ
การออกแบบ Quadcopter ที่ใช้งานได้จริง
จนถึงตอนนี้เราได้เรียนรู้เกี่ยวกับโครงสร้างพื้นฐานของตัวเครื่องและฮาร์ดแวร์ของโดรนแล้วตอนนี้เรามาเรียนรู้วิธีสร้างควอดคอปเตอร์หรือวงจรโดรนอย่างรวดเร็วและราคาถูกโดยใช้ส่วนประกอบธรรมดามาก ในโพสต์ก่อนหน้านี้ของฉันเราได้เรียนรู้วิธีสร้างเครื่อง Quadcopter ที่ค่อนข้างซับซ้อนและมีประสิทธิภาพโดยไม่ต้องใช้ไมโครคอนโทรลเลอร์สำหรับข้อมูลเพิ่มเติมที่คุณต้องการอ่านในโพสต์ต่อไปนี้:
วงจรควบคุมระยะไกลที่ไม่มี MCU | วงจรอิเล็กทรอนิกส์
ในบทความนี้เราพยายามทำให้การออกแบบข้างต้นง่ายขึ้นมากโดยการกำจัดมอเตอร์ไร้แปรงถ่านและแทนที่ด้วยมอเตอร์แบบแปรงและทำให้สามารถกำจัดความซับซ้อนได้ โมดูลวงจรขับ BLDC .
เนื่องจากรายละเอียดการสร้างเชิงกลของ quadcopter ได้กล่าวไว้ข้างต้นอย่างครอบคลุมแล้วเราจะจัดการเฉพาะในส่วนการออกแบบวงจรและเรียนรู้ว่าจะสร้างขึ้นสำหรับการบินวงจรโดรนที่ง่ายที่สุดที่เสนอได้อย่างไร
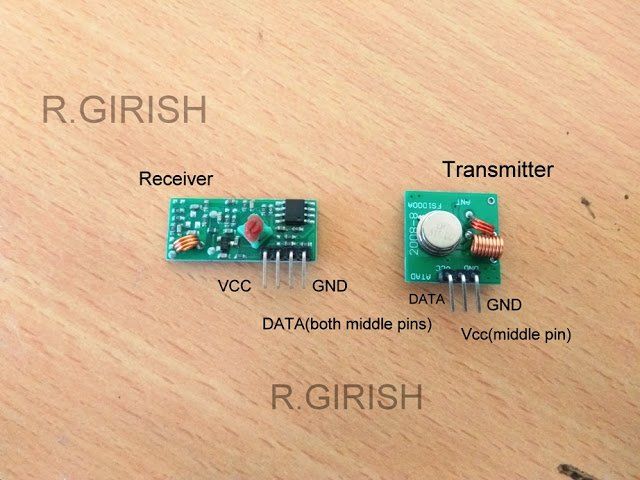
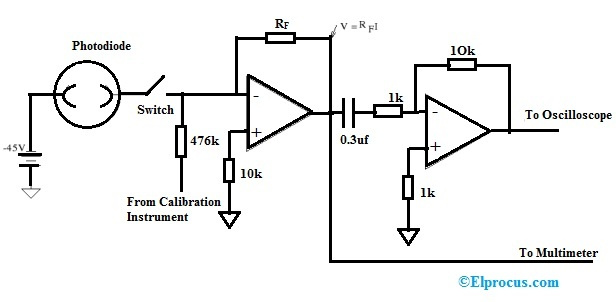
ดังที่ได้กล่าวไว้ก่อนหน้านี้ quadcopter แบบธรรมดานี้ต้องการโมดูลควบคุมระยะไกล RF พื้นฐานเท่านั้นดังที่แสดงในภาพตัวอย่างด้านล่าง:

คุณจะต้อง ซื้อโมดูล RF เหล่านี้ จากร้านค้าออนไลน์หรือจากตัวแทนจำหน่ายอะไหล่อิเล็กทรอนิกส์ในพื้นที่ของคุณ:
นอกเหนือจากที่กล่าวมาแล้ว โมดูลรีโมท RF นอกจากนี้ยังต้องใช้มอเตอร์แม่เหล็กถาวร 4 ตัวซึ่งเป็นหัวใจหลักของเครื่องโดรน อาจเป็นไปตามที่ระบุในภาพต่อไปนี้พร้อมคำอธิบายที่กำหนดหรืออื่น ๆ ที่คล้ายกันตามข้อกำหนดของผู้ใช้ที่ต้องการ:

ข้อกำหนดทางไฟฟ้าของมอเตอร์:
- 6V = แรงดันไฟฟ้า (สูงสุด 12V)
- 200mA = กระแสไฟฟ้าที่ใช้งาน
- 10,000 = รอบต่อนาที
ส่วนรายการ
- 1K, 10K 1/4 วัตต์ = 1 อัน
- ตัวเก็บประจุ 1uF / 25V = 1no
- ที่ตั้งไว้ล่วงหน้า 10K หรือ 5K = 1no
- Rx = ตัวต้านทานลวดพัน 5 วัตต์ค่าที่จะยืนยันด้วยการทดลอง
- IC 555 = 1 ไม่
- 1N4148 ไดโอด = 2nos
- IRF9540 Mosfet = 1 ไม่
- 6V Motor Brushed Type = 4nos
- สายไฟแบบยืดหยุ่นบัดกรีฟลักซ์ ฯลฯ
- PCB เอนกประสงค์สำหรับประกอบชิ้นส่วนข้างต้น
- โมดูลควบคุมระยะไกล RF 4 ช่องดังที่แสดงในภาพที่เกี่ยวข้อง
- ช่องอลูมิเนียมสกรูถั่วแผ่น ฯลฯ ตามที่อธิบายไว้ในบทความ
- แบตเตอรี่ดังแสดงด้านล่าง:

วิธีกำหนดค่าตัวรับสัญญาณรีโมทคอนโทรลด้วยมอเตอร์
ก่อนที่จะทำความเข้าใจเกี่ยวกับวิธีกำหนดค่าตัวรับสัญญาณรีโมทคอนโทรลด้วยมอเตอร์ควอดคอปเตอร์สิ่งสำคัญคือต้องเรียนรู้ว่าควรปรับหรือจัดตำแหน่งความเร็วของมอเตอร์อย่างไรเพื่อสร้างการเคลื่อนไหวซ้ายขวาเดินหน้าถอยหลังที่ต้องการ
โดยพื้นฐานแล้วมีสองวิธีที่สามารถเปิดใช้งาน quadcopter เพื่อเคลื่อนย้ายซึ่งอยู่ใน '+' และ 'x'modes ในการออกแบบของเราเราใช้โหมดการเคลื่อนไหวพื้นฐาน '+' สำหรับโดรนของเราตามที่ระบุในแผนภาพต่อไปนี้:

จากแผนภาพข้างต้นเราตระหนักดีว่าเราจำเป็นต้องเพิ่มความเร็วของมอเตอร์ที่เกี่ยวข้องอย่างเหมาะสมเพื่อดำเนินการบังคับทิศทางที่ต้องการบนโดรน
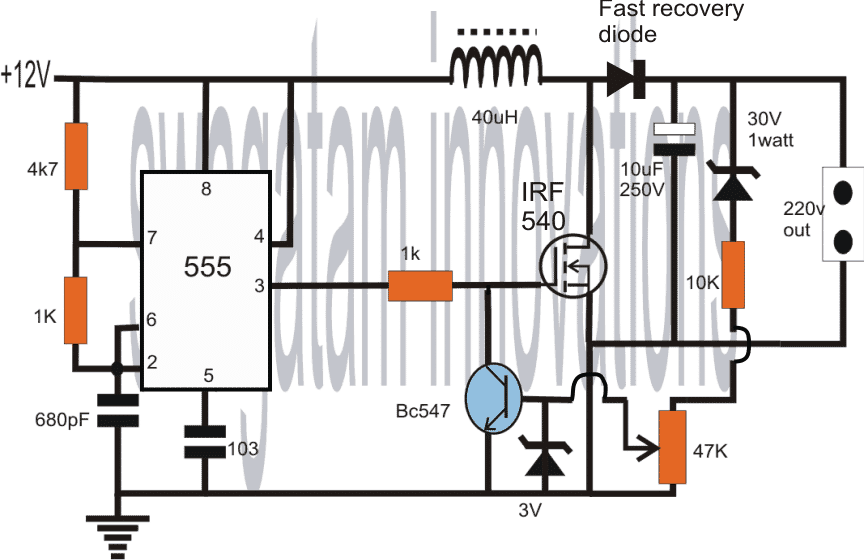
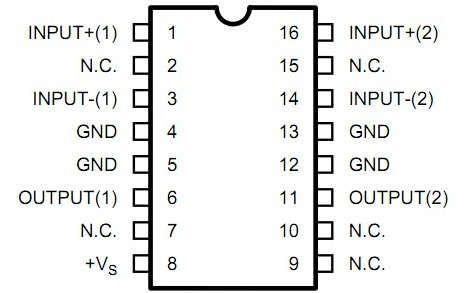
ความเร็วที่เพิ่มขึ้นนี้สามารถบังคับใช้ได้โดยกำหนดค่ารีเลย์รีโมทคอนโทรลตามแผนภาพการเดินสายต่อไปนี้ ในแผนภาพด้านล่างเราจะเห็นไฟล์ วงจร IC 555 PWM ต่อสายกับรีเลย์ 4 ตัวของโมดูลตัวรับสัญญาณรีโมทคอนโทรลของรีเลย์ 6 ตัว (รีเลย์ 1 ตัวไม่ได้ใช้งานและสามารถถอดออกได้เพื่อลดพื้นที่และน้ำหนัก)
การปรับ PWM
ตามที่เห็นในแผนภาพฟีด PWM เชื่อมต่อกับหน้าสัมผัส N / C ทั้งหมดของรีเลย์ซึ่งหมายความว่าโดยปกติ quadcopter จะโฉบผ่านเครื่องแบบนี้และฟีด PWM ที่เท่ากันซึ่งรอบการทำงานอาจถูกปรับในขั้นต้นเช่นนั้น quadcopter สามารถรับแรงขับและระดับความสูงที่ระบุไว้ได้อย่างถูกต้อง
สิ่งนี้อาจทดลองได้โดยการปรับหม้อ PWM ที่แสดงให้เหมาะสม
วิธีการกำหนดค่าผู้ติดต่อรีเลย์
สามารถมองเห็นหน้าสัมผัส N / O ของรีเลย์ได้โดยตรงกับแหล่งจ่ายไฟบวกดังนั้นเมื่อใดก็ตามที่กดปุ่มที่เกี่ยวข้องบนโทรศัพท์มือถือเครื่องส่งสัญญาณระยะไกลรีเลย์ที่เกี่ยวข้องจะเปิดใช้งานในโมดูลตัวรับซึ่งจะทำให้มอเตอร์ที่เกี่ยวข้องได้รับ แหล่งจ่ายไฟ 12V เต็มจากแบตเตอรี่
การทำงานข้างต้นช่วยให้มอเตอร์ที่เปิดใช้งานได้รับความเร็วมากกว่ามอเตอร์อื่น ๆ ซึ่งช่วยให้ quadcopter เคลื่อนที่ไปยังทิศทางที่กำหนด
ทันทีที่ปล่อยปุ่มรีโมตโดรนจะหยุดทันทีและยังคงอยู่ในโหมดคงที่
ในทำนองเดียวกันการเคลื่อนที่ในทิศทางอื่น ๆ สามารถทำได้โดยการกดปุ่มอื่น ๆ ที่กำหนดไว้บนโทรศัพท์ระยะไกล
รีเลย์ที่อยู่บนสุดมีไว้เพื่อให้แน่ใจว่าเครื่องลงจอดอย่างปลอดภัยทำได้โดยการเพิ่มตัวต้านทานการลดลงปัจจุบันเป็นชุดพร้อมหน้าสัมผัส N / O ของรีเลย์ที่แสดง
ค่าตัวต้านทานนี้ต้องคำนวณด้วยการทดลองบางอย่างเช่น quadcopter จะลอยอยู่เหนือพื้นดินประมาณสองสามฟุตเมื่อใดก็ตามที่ตัวต้านทานนี้ถูกสลับผ่านรีเลย์ที่ต่ออยู่
แผนภูมิวงจรรวม

รีเลย์ที่แสดงเป็นส่วนหนึ่งของตัวรับโมดูล RF ซึ่งตอนแรกหน้าสัมผัสไม่ได้เชื่อมต่อ (ว่างเปล่าตามค่าเริ่มต้น) และจำเป็นต้องต่อสายตามที่ระบุไว้ในแผนภาพด้านบน
ควรติดตั้งตัวรับสัญญาณระยะไกล RF ภายในเครื่องควอดคอปเตอร์และรีเลย์ของมันต่อสายกับมอเตอร์และแบตเตอรี่ที่เกี่ยวข้องตามรูปแบบที่แสดงด้านบน
คุณสามารถเห็นขั้วต่อบางตัว (สีเขียว) ซึ่งอาจเพิ่มน้ำหนักให้กับโดรนโดยไม่จำเป็น คุณสามารถถอดออกทั้งหมดเพื่อลดน้ำหนักและเชื่อมต่อสายไฟที่เกี่ยวข้องโดยตรงกับ PCB โดยการบัดกรี
โดรนเคลื่อนที่อย่างไร:
ตามที่อธิบายไว้ในการสนทนาข้างต้นเมื่อกดปุ่มรีโมทโดยเฉพาะปุ่มดังกล่าวจะทำงานรีเลย์ที่สอดคล้องกันของโมดูล quadcopter ทำให้มอเตอร์ที่เกี่ยวข้องเคลื่อนที่เร็วขึ้น
การดำเนินการนี้จะบังคับให้เครื่องเคลื่อนที่ไปในทิศทางตรงกันข้ามกับมอเตอร์ซึ่งกำลังถูกเปลี่ยนให้หมุนด้วย RPM ที่เร็วขึ้น
ตัวอย่างเช่นการเพิ่มความเร็วของมอเตอร์ทางทิศใต้ทำให้เครื่องเคลื่อนที่ไปทางทิศเหนือการเพิ่มมอเตอร์ทิศเหนือทำให้เครื่องเคลื่อนที่ไปทางทิศใต้การเพิ่มความเร็วของมอเตอร์ทางทิศตะวันออกในทำนองเดียวกันทำให้เครื่องเคลื่อนที่ไปทางทิศตะวันตกและในทางกลับกัน
ที่น่าสนใจคือการเพิ่มมอเตอร์ทางทิศใต้ / ตะวันออกทำให้ Quadcopter สามารถเคลื่อนที่ไปทางทิศเหนือ / ตะวันตกซึ่งอยู่ในโหมดทแยงมุม .... และอื่น ๆ
ข้อดีและข้อเสียของวงจรควบคุมระยะไกล Qaudcopter แบบง่ายที่อธิบายไว้ข้างต้น
ข้อดี
- ราคาถูกและสร้างง่ายแม้จะเป็นมือสมัครเล่นที่ค่อนข้างใหม่
- ไม่ต้องใช้จอยสติ๊กที่ซับซ้อน
- สามารถควบคุมได้โดยใช้โมดูลรีโมทคอนโทรล 6 ช่องสัญญาณเดียว
จุดด้อย
- มีประสิทธิภาพน้อยกว่าในแง่ของการสำรองแบตเตอรี่เนื่องจากการมีส่วนร่วมของมอเตอร์แบบแปรง
- ความเร็วทิศทางคงที่และไม่สามารถเปลี่ยนแปลงได้ผ่านโทรศัพท์มือถือรีโมทคอนโทรล
- การหลบหลีกอาจไม่ราบรื่น แต่กระตุกเล็กน้อยขณะสลับปุ่ม
ก่อนหน้านี้: อธิบายตัวต้านทานการตรวจจับแรง ถัดไป: Capacitive Voltage Divider