โพสต์อธิบายถึงตัวควบคุม DC Motor ซึ่งมีการชดเชยแรงบิดคงที่เพื่อให้มอเตอร์ทำงานด้วยความเร็วที่สม่ำเสมอโดยไม่คำนึงถึงภาระ
ข้อเสียเปรียบของตัวควบคุมความเร็วทั่วไป
ข้อเสียเปรียบประการหนึ่งของ ตัวควบคุมความเร็วที่เรียบง่าย พวกเขาจัดหามอเตอร์ด้วยแรงดันไฟฟ้าคงที่ที่กำหนดไว้ล่วงหน้าเท่านั้น ด้วยเหตุนี้ความเร็วจึงไม่คงที่และแปรผันตามภาระของมอเตอร์เนื่องจากไม่มีการชดเชยแรงบิด
ตัวอย่างเช่นในรถไฟจำลองที่มีตัวควบคุมที่เรียบง่ายความเร็วของรถไฟจะค่อยๆลดลงเมื่อปีนเขาไล่ระดับและเร่งความเร็วขณะมุ่งลงเนิน
ดังนั้นสำหรับโมเดลจะฝึกการปรับการควบคุมหม้อเพื่อรักษาความเร็วมอเตอร์ที่เลือกไว้เช่นเดียวกันจะเบี่ยงเบนไปขึ้นอยู่กับภาระที่เครื่องยนต์อาจดึง
วงจรควบคุมความเร็วมอเตอร์แรงบิดคงที่ที่อธิบายไว้ในบทความนี้จะกำจัดปัญหานี้โดยการติดตามความเร็วของมอเตอร์และรักษาให้คงที่สำหรับการตั้งค่าการควบคุมที่กำหนดไว้ล่วงหน้าไม่ว่าโหลดจะอยู่ในมอเตอร์
สามารถใช้วงจรได้ในเกือบทุกรุ่นที่ใช้มอเตอร์แม่เหล็กถาวร DC
การคำนวณกลับ EMF Factor
แรงดันไฟฟ้าข้ามขั้วมอเตอร์ประกอบด้วยสองปัจจัยคือด้านหลัง e.m.f. ผลิตโดยมอเตอร์และแรงดันตกคร่อมความต้านทานของกระดอง
ด้านหลัง e.m.f. โดยปกติแล้วขดลวดของมอเตอร์จะเป็นสัดส่วนกับความเร็วของมอเตอร์ซึ่งหมายความว่าสามารถตรวจสอบความเร็วของมอเตอร์ได้โดยการวัดปริมาณแรงเคลื่อนไฟฟ้าด้านหลังนี้ แต่ปัญหาหลักคือการแยกและตรวจจับ e.m.f ด้านหลัง จากแรงดันต้านทานกระดอง
สมมติว่ามีการต่อตัวต้านทานแยกเป็นอนุกรมกับมอเตอร์จากนั้นเมื่อพิจารณาว่ากระแสเดี่ยวทั่วไปผ่านตัวต้านทานนี้และผ่านความต้านทานของกระดองแรงดันไฟฟ้าที่ตกคร่อมตัวต้านทานแบบอนุกรมทั้งสองอาจเทียบเท่ากับการลดลงของความต้านทานของกระดอง
จริงๆแล้วสามารถสันนิษฐานได้ว่าเมื่อค่าความต้านทานทั้งสองนี้เหมือนกันขนาดของแรงดันไฟฟ้าทั้งสองตัวในตัวต้านทานแต่ละตัวก็จะใกล้เคียงกันด้วย ด้วยข้อมูลนี้อาจเป็นไปได้ที่จะหักแรงดันไฟฟ้าที่ตกของ R3 ออกจากแรงดันไฟฟ้าของมอเตอร์และรับค่า e.m.f ย้อนกลับที่ต้องการสำหรับการประมวลผล

การประมวลผลกลับ EMF สำหรับแรงบิดคงที่
วงจรที่เสนอจะตรวจสอบด้านหลังอย่างต่อเนื่อง e.m.f. และควบคุมกระแสมอเตอร์ให้สอดคล้องกันเพื่อให้แน่ใจว่าสำหรับการตั้งค่าการควบคุมหม้อที่กำหนดค่ากลับ e.m.f. พร้อมกับความเร็วมอเตอร์จะคงที่ที่แรงบิดคงที่
เพื่อให้สามารถอธิบายรายละเอียดของวงจรได้ง่ายขึ้นจึงถือว่า P2 ถูกปรับและยึดไว้ที่ตำแหน่งกึ่งกลางและตัวต้านทาน R3 ถูกเลือกให้เทียบเท่ากับค่าความต้านทานของกระดองมอเตอร์
การคำนวณแรงดันมอเตอร์
สามารถคำนวณแรงดันไฟฟ้าของมอเตอร์ได้โดยการเพิ่ม e.m.f ด้านหลัง Va ที่มีแรงดันตกคร่อมความต้านทานภายในมอเตอร์ Vr
เมื่อพิจารณาว่า R3 ลดแรงดัน Vr แรงดันเอาต์พุต Vo จะเท่ากับ Va + 2 V
แรงดันไฟฟ้าที่อินพุทกลับด้าน (-) ของ IC1 จะเป็น Va + Vr และที่อินพุตที่ไม่กลับด้าน (+) จะเป็น Vi + (Va + 2Vr - Vi) / 2
เนื่องจากขนาดแรงดันไฟฟ้าสองตัวข้างต้นควรจะเท่ากันเราจึงจัดสมการข้างต้นเป็น:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
การทำให้สมการนี้ง่ายขึ้นจะให้ Va = Vi
สมการข้างต้นระบุว่ากลับ e.m.f. ของมอเตอร์ถูกยึดไว้อย่างสม่ำเสมอในระดับเดียวกับแรงดันไฟฟ้าควบคุม สิ่งนี้ช่วยให้มอเตอร์ทำงานด้วยความเร็วและแรงบิดคงที่สำหรับการตั้งค่าที่ระบุของการปรับความเร็ว P1
P2 ถูกรวมไว้เพื่อชดเชยระดับความแตกต่างที่อาจมีอยู่ระหว่างความต้านทาน R3 และความต้านทานของกระดอง มันดำเนินการโดยการปรับขนาดของผลตอบรับเชิงบวกบนแอมป์อินพุตที่ไม่กลับด้าน
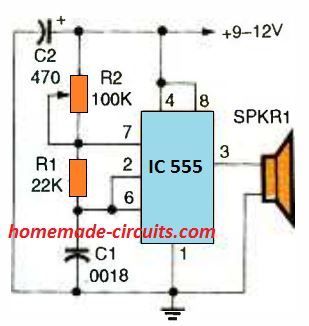
โดยทั่วไปแล้ว op amp LM3140 จะเปรียบเทียบแรงดันไฟฟ้าที่พัฒนาขึ้นทั่วทั้งกระดองมอเตอร์กับแรงเคลื่อนไฟฟ้าด้านหลังที่เทียบเท่ากับมอเตอร์และควบคุมศักยภาพพื้นฐานของ T1 2N3055
T1 ถูกกำหนดค่าเป็นไฟล์ ผู้ติดตามตัวปล่อย ควบคุมความเร็วของมอเตอร์ให้สอดคล้องกับศักยภาพพื้นฐาน มันจะเพิ่มแรงดันไฟฟ้าให้กับมอเตอร์เมื่อ op amp ตรวจพบแรงเคลื่อนไฟฟ้าย้อนกลับที่สูงขึ้นส่งผลให้ความเร็วของมอเตอร์เพิ่มขึ้นและในทางกลับกัน
ควรติดตั้ง T1 บนฮีทซิงค์ที่เหมาะสมเพื่อการทำงานที่เหมาะสม
วิธีการตั้งค่าวงจร
การตั้งค่าวงจรควบคุมความเร็วมอเตอร์แรงบิดคงที่ทำได้โดยการปรับ P2 ด้วยมอเตอร์ที่มีภาระต่างกันจนกว่ามอเตอร์จะได้รับแรงบิดคงที่โดยไม่คำนึงถึงสภาวะการโหลด
เมื่อนำวงจรไปใช้กับรถไฟจำลองต้องใช้ความระมัดระวังไม่ให้ P2 หันไปทาง P1 มากเกินไปซึ่งอาจส่งผลให้รถไฟจำลองช้าลงและในทางกลับกัน P2 จะต้องไม่หันไปในทิศทางตรงกันข้ามมากเกินไปซึ่งอาจส่งผลให้ ความเร็วของรถไฟจะเร็วขึ้นจริง ๆ ในขณะที่ขึ้นเขาลาดชัน
คู่ของ: สำรวจวงจรเครื่องชาร์จแบตเตอรี่ Ni-Cd อย่างง่าย ถัดไป: วงจรรับส่งสัญญาณขนาดเล็ก