การใช้งานในภาคอุตสาหกรรมต้องการพลังงานจากแหล่งจ่ายแรงดันไฟฟ้ากระแสตรง แอพพลิเคชั่นเหล่านี้จำนวนมาก แต่จะทำได้ดีกว่าในกรณีที่ป้อนจากแหล่งจ่ายแรงดันไฟฟ้ากระแสตรงที่ปรับเปลี่ยนได้ การเปลี่ยนแปลงของแรงดันไฟฟ้ากระแสตรงคงที่เป็นแรงดันไฟฟ้า DC o / p แบบแปรผันการใช้อุปกรณ์เซมิคอนดักเตอร์เรียกว่าการสับ เครื่องบดสับเป็นอุปกรณ์คงที่ใช้ในการแปลงแรงดันไฟฟ้า DC i / p แบบคงที่เป็นแรงดันไฟฟ้า o / p แบบตรง เป็นสวิตช์เปิด / ปิดเซมิคอนดักเตอร์ความเร็วสูง สำหรับวงจรสับให้บังคับไทริสเตอร์ที่สับเปลี่ยน, GTO, เพาเวอร์ BJT และ มอสเฟตไฟฟ้า ใช้เป็นพลังงาน อุปกรณ์เซมิคอนดักเตอร์ . เครื่องสับอาจถูกคิดว่าเป็น DC เทียบเท่ากับหม้อแปลงไฟฟ้ากระแสสลับเนื่องจากทำงานในลักษณะที่เหมือนกันเช่นหม้อแปลงไฟฟ้า เครื่องบดสับใช้เพื่อเพิ่มหรือลดแรงดันไฟฟ้า DC i / p คงที่ ระบบสับให้ประสิทธิภาพสูงการควบคุมที่ราบรื่นการสร้างใหม่และการตอบสนองที่รวดเร็ว มีกลยุทธ์การควบคุมสองประเภทที่ใช้ใน DC choppers ได้แก่ การควบคุมอัตราส่วนเวลา และการควบคุมขีด จำกัด ปัจจุบัน
การควบคุมอัตราส่วนเวลาและการควบคุมขีด จำกัด ปัจจุบัน
มีกลยุทธ์การควบคุมสองประเภทที่ใช้ใน DC choppers ได้แก่ การควบคุมอัตราส่วนเวลาและการควบคุมขีด จำกัด กระแส ในทุกสถานการณ์ค่าเฉลี่ยของแรงดันไฟฟ้า o / p สามารถเปลี่ยนแปลงได้ ความแตกต่างระหว่างสองสิ่งนี้สามารถอธิบายได้ด้านล่าง
การควบคุมอัตราส่วนเวลา
ในอัตราส่วนเวลาควบคุมค่าของอัตราส่วนหน้าที่ K = TON / T จะเปลี่ยนไป ที่นี่ 'K' เรียกว่ารอบการทำงาน การควบคุมปันส่วนเวลามีสองวิธีคือ ความถี่ตัวแปรและการดำเนินการความถี่คงที่
การทำงานความถี่คงที่
ในการดำเนินกลยุทธ์การควบคุมความถี่คงที่ ON time TON จะเปลี่ยนไปโดยรักษาความถี่ไว้คือ f = 1 / T หรือช่วงเวลาคงที่ 'T' การดำเนินการนี้มีชื่อว่า PWM (การควบคุมการมอดูเลตความกว้างพัลส์) . ดังนั้นแรงดันไฟฟ้าขาออกสามารถเปลี่ยนแปลงได้ตามเวลา ON ที่แตกต่างกัน

การทำงานความถี่คงที่
การทำงานของความถี่ตัวแปร
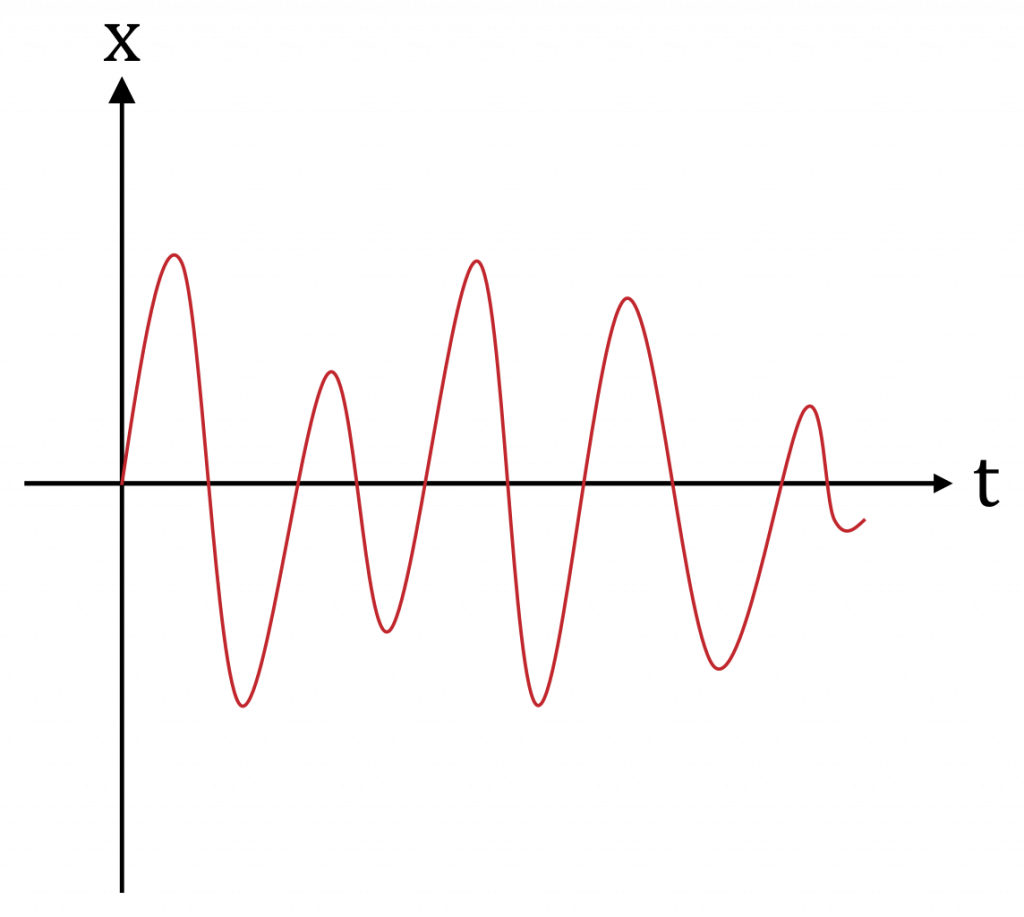
ในการดำเนินกลยุทธ์การควบคุมความถี่ตัวแปรความถี่ (f = 1 / T) จะเปลี่ยนไปจากนั้นช่วงเวลา ‘T’ จะเปลี่ยนไปด้วย ชื่อนี้ยังเป็นไฟล์ การมอดูเลตความถี่ การควบคุมในทั้งสองกรณีแรงดันไฟฟ้า o / p สามารถเปลี่ยนแปลงได้ด้วยการเปลี่ยนแปลงอัตราส่วนหน้าที่

การทำงานของความถี่ตัวแปร
ข้อเสียของกลยุทธ์การควบคุมมีดังต่อไปนี้
- ต้องเปลี่ยนความถี่ในช่วงที่กว้างขวางของการควบคุมแรงดันไฟฟ้า o / p ใน FM (การมอดูเลตความถี่) การออกแบบตัวกรองสำหรับการเปลี่ยนความถี่กว้างนั้นค่อนข้างยาก
- สำหรับการควบคุมปันส่วนรอบหน้าที่ การเปลี่ยนแปลงความถี่จะแตกต่างกันไป ด้วยเหตุนี้จึงมีความเป็นไปได้ที่จะมีการบุกรุกระบบด้วยความถี่บวกเช่นสายโทรศัพท์และการส่งสัญญาณในเทคนิคการมอดูเลตความถี่ (FM)
- เวลาปิดที่มากในเทคนิค FM (การมอดูเลตความถี่) อาจทำให้กระแสโหลดผิดปกติซึ่งไม่เป็นที่ต้องการ
- ดังนั้นระบบความถี่คงที่ที่มีการมอดูเลตความกว้างพัลส์จึงเป็นที่ต้องการสำหรับตัวสับหรือตัวแปลง DC-DC
การควบคุมขีด จำกัด ปัจจุบัน
ในตัวแปลง DC เป็น DC ค่าปัจจุบันจะแตกต่างกันไประหว่างค่าสูงสุดและระดับต่ำสุดของแรงดันไฟฟ้าคงที่ ในวิธีนี้ตัวแปลง DC เป็น DC จะเปิดแล้วปิดเพื่อยืนยันว่ากระแสไฟฟ้าจะถูกเก็บรักษาอย่างต่อเนื่องระหว่างขีด จำกัด บนและขีด จำกัด ล่าง เมื่อพลังงานปัจจุบันเกินจุดสูงสุดตัวแปลง DC-DC จะดับลง

การควบคุมขีด จำกัด ปัจจุบัน
ในขณะที่สวิตช์อยู่ในสถานะปิดล้ออิสระปัจจุบันจะผ่านไดโอดและตกลงในลักษณะเลขชี้กำลัง สับจะเปิดเมื่อการไหลของกระแสกระจายระดับต่ำสุด เทคนิคนี้สามารถใช้ได้ทั้งเมื่อ ON time ‘T’ ไม่มีที่สิ้นสุดหรือเมื่อความถี่ f = 1 / T
ดังนั้นนี่คือความแตกต่างระหว่างการควบคุมอัตราส่วนเวลาและการควบคุมขีด จำกัด ปัจจุบัน จากข้อมูลข้างต้นในที่สุดเราสามารถสรุปได้ว่ามีการนำเสนอตัวแปลงหรือตัวสับ DC-DC พร้อมกับการทำงานและรูปแบบของคลื่นในแต่ละกรณี มีการกล่าวถึงกลยุทธ์การควบคุมต่างๆที่ใช้ในเครื่องสับกระแสตรง เราหวังว่าคุณจะเข้าใจแนวคิดนี้ดีขึ้น นอกจากนี้ข้อสงสัยใด ๆ เกี่ยวกับแนวคิดนี้หรือ เพื่อดำเนินโครงการอิเล็กทรอนิกส์ใด ๆ โปรดให้ข้อเสนอแนะที่มีค่าของคุณโดยการแสดงความคิดเห็นในส่วนความคิดเห็นด้านล่าง นี่คือคำถามสำหรับคุณ แอปพลิเคชั่นของตัวแปลง DC เป็น DC คืออะไร เหรอ?