ปัจจุบันใน ระบบอัตโนมัติอุตสาหกรรม มีการใช้อุปกรณ์สมาร์ทฟิลด์ประเภทต่างๆ แต่การตรวจสอบอุปกรณ์ทุกชิ้นเป็นเรื่องยากมากในอุตสาหกรรมโดยหน่วยงานหรือวิศวกรภาคสนาม โดยทั่วไป การตรวจสอบประเภทนี้ทำได้โดยใช้อุปกรณ์อัจฉริยะ ซึ่งช่วยให้สามารถถ่ายโอนข้อมูลระหว่างอุปกรณ์ที่เชื่อมต่อต่างๆ ภายในและภายนอกอุตสาหกรรมไปยังระบบตรวจสอบหลัก ดังนั้น โปรโตคอล HART จึงถูกนำมาใช้ในปี 1980 และสร้างจากมาตรฐาน Bell 202 โปรโตคอลนี้ได้กลายเป็นมาตรฐานอุตสาหกรรม ดังนั้นจึงใช้ในระบบอัตโนมัติทางอุตสาหกรรม ดังนั้น บทความนี้จะกล่าวถึงภาพรวมของ โปรโตคอล HART - การทำงานกับแอพพลิเคชั่น
โปรโตคอล HART คืออะไร?
คำว่า HART ในโปรโตคอล HART ย่อมาจาก 'Highway Addressable Remote Transducer' ซึ่งเป็นโปรโตคอลมาตรฐานแบบเปิดที่ใช้ทั่วโลกในการส่งและรับข้อมูลดิจิทัลด้วยการเดินสายแบบแอนะล็อกระหว่างอุปกรณ์สมาร์ทและ ระบบควบคุม . โปรโตคอลนี้ได้รับความนิยมอย่างมาก ดังนั้นอุปกรณ์กว่า 30 ล้านเครื่องทั่วโลกจึงขับเคลื่อนด้วยโปรโตคอล HART โปรโตคอลนี้ใช้เพื่อสร้างการสื่อสารระหว่างระบบโฮสต์รวมถึงอุปกรณ์สมาร์ทฟิลด์ในอุตสาหกรรม
โปรโตคอล HART ได้รับความนิยมมากขึ้นเนื่องจากความสามารถในการรองรับโปรโตคอลแอนะล็อกแบบเก่าที่มี 4-20 mA ในขณะเดียวกันก็รวมถึงข้อดีที่สำคัญของเครื่องมือวัดอัจฉริยะแบบดิจิตอล
โปรโตคอลนี้อธิบายเทคโนโลยีการเชื่อมต่อทางกายภาพและคำสั่งที่ใช้โดยแอปพลิเคชันต่างๆ คำสั่ง Hart มีสามประเภท Universal, Common Practice & Device Specific
คำสั่งประเภทสากลดำเนินการผ่านอุปกรณ์ HART ทั้งหมด คำสั่งเหล่านี้ส่วนใหญ่ใช้โดยคอนโทรลเลอร์เพื่อระบุอุปกรณ์ภาคสนามและอ่านข้อมูลกระบวนการ
คำสั่งประเภท Common Practice ใช้เพื่ออธิบายฟังก์ชันต่างๆ ที่ปกติแล้วใช้ได้กับอุปกรณ์ภาคสนามเท่านั้น อุปกรณ์เหล่านี้รวมถึงคำสั่งสำหรับเปลี่ยนช่วง การเลือกหน่วยวิศวกรรม และดำเนินการทดสอบตัวเอง
คำสั่งประเภทเฉพาะอุปกรณ์ไม่เหมือนกันสำหรับอุปกรณ์ทุกเครื่อง คำสั่งเหล่านี้ใช้ฟังก์ชันการกำหนดค่าและการปรับเปลี่ยนที่ไม่ซ้ำกัน ดังนั้นจึงเป็นเรื่องสำคัญมากที่จะต้องทราบว่าเมื่ออุปกรณ์จากผู้ผลิตหลายรายใช้ฟังก์ชันการทำงานที่คล้ายคลึงกันกับภายนอก ตัวอย่างเช่น การวัดความดันแตกต่างอาจรวมถึงฮาร์ดแวร์ที่แตกต่างกันโดยสิ้นเชิงและชุดคำสั่งเฉพาะอุปกรณ์ที่แตกต่างกันด้วย
สถาปัตยกรรมโปรโตคอล HART
โปรโตคอล HART ทำงานในการกำหนดค่าเครือข่ายสองแบบ เช่น แบบจุดต่อจุดและแบบหลายจุด ซึ่งจะกล่าวถึงด้านล่าง
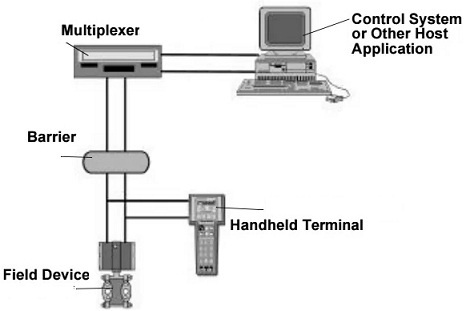
การกำหนดค่าเครือข่ายแบบชี้ไปที่จุด
ในการกำหนดค่าเครือข่ายแบบจุดต่อจุด สำหรับการสื่อสารตัวแปรกระบวนการเดียว สัญญาณ 4–20 mA คงที่จะถูกใช้ ในขณะที่ตัวแปรกระบวนการเพิ่มเติม และพารามิเตอร์การออกแบบจะถูกส่งแบบดิจิทัลด้วยโปรโตคอล HART ดังนั้นสัญญาณอะนาล็อก 4–20 mA จะไม่เปลี่ยนแปลงโดยสัญญาณ HART และสามารถใช้งานได้ตามปกติ สัญญาณดิจิตอลการสื่อสาร HART ให้สิทธิ์ในการเข้าสู่ตัวแปรทุติยภูมิและข้อมูลอื่น ๆ ที่สามารถนำไปใช้เพื่อการบำรุงรักษา การว่าจ้าง การดำเนินงานและการวินิจฉัย
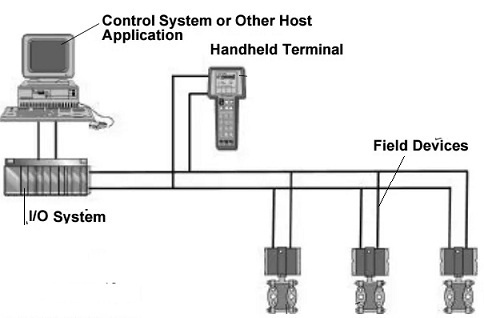
การกำหนดค่าเครือข่าย Multi Drop
การกำหนดค่าเครือข่ายนี้ช่วยให้สามารถเชื่อมต่ออุปกรณ์ต่างๆ ด้วยสายคู่เดียว การสื่อสารภายในการกำหนดค่านี้เป็นแบบดิจิทัลทั้งหมด เนื่องจากการสื่อสารทั่วทั้งกระแสลูปอนาล็อกถูกปิดใช้งาน เนื่องจากกระแสทั่วทั้งอุปกรณ์ทั้งหมดได้รับการแก้ไขที่ค่าต่ำสุดที่เพียงพอสำหรับการทำงานของอุปกรณ์ตามปกติ 4mA
HART Communication ทำงานอย่างไร?
โปรโตคอลการสื่อสาร HART ใช้มาตรฐาน Bell 202 FSK (Frequency Shift Keying) เพื่อซ้อนสัญญาณดิจิตอลซึ่งแสดงด้วยความถี่ที่แตกต่างกันสองความถี่ เช่น 1,200 Hz & 2,200 Hz ที่นี่ความถี่ 1,200 Hz แทนบิต 1 ในขณะที่ความถี่ 2,200 Hz แทนบิต 0 ตามลำดับ
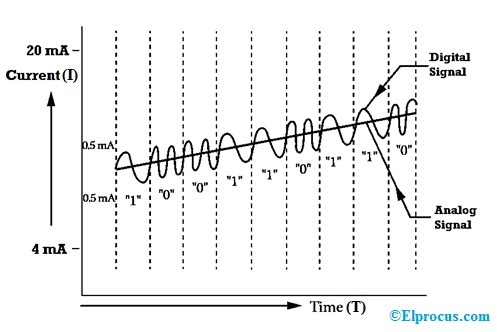
เมื่อคลื่นไซน์ที่มีความถี่เหล่านี้วางทับบนสายสัญญาณแอนะล็อก DC การถ่ายโอนข้อมูลจะเกิดขึ้น ดังนั้น ระหว่างการถ่ายโอนข้อมูลนี้ สัญญาณ 4-20 mA จะไม่ได้รับผลกระทบ เนื่องจากค่ามาตรฐานของสัญญาณคีย์การเลื่อนความถี่เท่ากับศูนย์ โปรโตคอลนี้รองรับช่องสัญญาณการสื่อสารสองช่องพร้อมกัน เช่น สัญญาณแอนะล็อกและสัญญาณดิจิตอล 4-20 mA
สัญญาณแอนะล็อกจะสื่อสารค่าที่วัดได้หลักด้วยลูปกระแส 4-20mA ในขณะที่ข้อมูลอุปกรณ์เพิ่มเติมจะได้รับการสื่อสารผ่านสัญญาณดิจิตอลที่วางซ้อนบนสัญญาณแอนะล็อก
สัญญาณดิจิทัลประกอบด้วยข้อมูลของอุปกรณ์ เช่น สภาพของอุปกรณ์ การวินิจฉัย ค่าที่คำนวณได้ เป็นต้น ดังนั้น ช่องทางการสื่อสารทั้งสองช่องทางจึงร่วมกันนำเสนอโซลูชันการสื่อสารที่มีประสิทธิภาพสูงและราคาประหยัด ซึ่งง่ายต่อการใช้งานและกำหนดค่า โปรโตคอลนี้มักเรียกว่าโปรโตคอลไฮบริดเนื่องจากเป็นการรวมการสื่อสารทั้งแบบแอนะล็อกและดิจิทัล
เทคโนโลยี HART มีความแตกต่างกันในฐานะโปรโตคอลหลัก/รอง เนื่องจากอุปกรณ์สเลฟจะทำงานก็ต่อเมื่ออุปกรณ์หลักเชื่อมต่ออยู่เท่านั้น ที่นี่ อุปกรณ์สเลฟคือสมาร์ทดีไวซ์ และอุปกรณ์หลักคือคอมพิวเตอร์
โหมดของโปรโตคอล HART
โดยทั่วไปสำหรับการสื่อสารภายใน HART Protocol อุปกรณ์ที่ใช้ในเครือข่ายคือ PLC หรือระบบควบคุมแบบกระจายที่ได้รับเลือกให้เป็น Master ในขณะที่อุปกรณ์ภาคสนามอื่น ๆ ถือเป็นทาสเช่นเซ็นเซอร์หรือแอคทูเอเตอร์ แต่ในที่นี้ การสื่อสารระหว่างมาสเตอร์และสเลฟส่วนใหญ่ขึ้นอยู่กับโหมดการสื่อสารที่ระบบจัดเรียงไว้ เครือข่ายโปรโตคอล HART สื่อสารในสองโหมด เช่น โหมดมาสเตอร์/สเลฟ และโหมดต่อเนื่อง
โหมดมาสเตอร์/สเลฟ
โหมดนี้เรียกอีกอย่างว่าโหมดตอบสนองคำขอ ในโหมดประเภทนี้ อุปกรณ์สเลฟเพียงแค่ส่งข้อมูลเมื่อมีการร้องขอจากอุปกรณ์มาสเตอร์ สำหรับแต่ละลูป HART สามารถเชื่อมต่อสองมาสเตอร์ได้ ดังนั้นมาสเตอร์หลักโดยปกติคือ DCS (ระบบควบคุมแบบกระจาย), PC (คอมพิวเตอร์ส่วนบุคคล) หรือ PLC (ตัวควบคุมลอจิกแบบตั้งโปรแกรมได้) ในขณะที่ต้นแบบรองคือพีซีเครื่องอื่นหรือเทอร์มินัลพกพา อุปกรณ์สเลฟคือแอคทูเอเตอร์ คอนโทรลเลอร์ และทรานสมิตเตอร์ที่ตอบสนองต่อคำสั่งจากอุปกรณ์หลัก
โหมดถ่ายต่อเนื่อง
อุปกรณ์ที่ใช้โปรโตคอล HART บางเครื่องรองรับโหมดการสื่อสารนี้เท่านั้น โหมดนี้ช่วยให้การสื่อสารเร็วขึ้น เช่น การอัปเดตข้อมูลสามถึงสี่ครั้งในแต่ละวินาที อุปกรณ์หลักในโหมดนี้สั่งให้อุปกรณ์รองส่งข้อความตอบกลับ HART ทั่วไปอย่างต่อเนื่อง เจ้านายได้รับข้อความด้วยความเร็วสูงจนกระทั่งสั่งให้ทาสหยุดระเบิด โหมดนี้ใช้ได้เมื่อจำเป็นต้องใช้อุปกรณ์ HART ด้านบนเพื่อสื่อสารจาก HART Loop
โปรโตคอล HART กับ Modbus
ความแตกต่างระหว่างโปรโตคอล HART และ Modbus มีดังต่อไปนี้
|
โปรโตคอล HART |
Modbus |
| HART เป็นโปรโตคอลไฮบริด | Modbus เป็นโปรโตคอลการสื่อสารข้อมูล |
| HART ใช้กันอย่างแพร่หลายในระบบกระบวนการและเครื่องมือวัด ซึ่งมีตั้งแต่ระบบอัตโนมัติขนาดเล็กไปจนถึงงานอุตสาหกรรมที่มีความซับซ้อนสูง | Modbus ปกติใช้สำหรับส่งสัญญาณจากเครื่องมือวัดและอุปกรณ์ควบคุมไปยังระบบรวบรวมข้อมูลหรือตัวควบคุมหลัก |
| โปรโตคอลนี้ทำงานในสองโหมดการทำงาน เช่น แบบจุดต่อจุดและแบบมัลติดร็อป | Modbus ทำงานในโหมดการส่งข้อมูลสองโหมด เช่น โหมด ASCII หรือโหมด RTU |
ข้อดี
ดิ ข้อดีของโปรโตคอล HART รวมสิ่งต่อไปนี้
- อุปกรณ์ที่เปิดใช้งานโดยโปรโตคอล HART อนุญาตให้ผู้ใช้ทำให้อุปกรณ์ใช้ข้อมูลที่ดีที่สุดเพื่อเพิ่มประสิทธิภาพในการปฏิบัติงาน
- ลดเวลาหยุดทำงานเนื่องจากความล้มเหลวของอุปกรณ์โดยตระหนักถึงปัญหาที่อาจเกิดขึ้นก่อนที่จะเกิดขึ้น
- ช่วยลดต้นทุนสินค้าคงคลังและการบำรุงรักษาอุปกรณ์
- ลดเวลารอสำหรับการรับรู้ปัญหาและการแก้ปัญหา
- ช่วยเพิ่มระดับความสมบูรณ์ด้านความปลอดภัยโดยใช้การวินิจฉัยขั้นสูง
- ประโยชน์ของการเลือกโปรโตคอล HART ได้แก่ ความสามารถทางดิจิทัล ความสามารถแบบแอนะล็อก ความพร้อมใช้งาน & การทำงานร่วมกัน
- โปรโตคอลนี้ยังสามารถใช้ได้กับอุปกรณ์และเซ็นเซอร์ต่างๆ
- อุปกรณ์ที่ใช้โปรโตคอล HART ได้รับการยอมรับอย่างกว้างขวางในอุตสาหกรรมต่างๆ
- โปรโตคอลนี้เพิ่มความพร้อมใช้งานของระบบ ความสม่ำเสมอของความคืบหน้า ฯลฯ
ข้อเสีย
ดิ ข้อเสียของโปรโตคอล HART รวมสิ่งต่อไปนี้
- สัญญาณดิจิตอลภายในการส่ง HART ค่อนข้างช้า
- สำหรับการจัดเรียงแบบมัลติดร็อป สัญญาณแอนะล็อกไม่สามารถเข้าถึงได้และหมายเลข ของอุปกรณ์ที่สามารถแยกสายส่งถูกจำกัด
- สามารถตรวจสอบตัวแปรกระบวนการได้เพียงตัวเดียวเท่านั้นเมื่อใดก็ได้
- โปรโตคอลประเภทนี้ค่อนข้างช้าเมื่อเทียบกับระบบ Fieldbus อื่นๆ เช่น Profibus & Foundation Fieldbus ดังนั้นเวลาตอบสนองที่ช้านี้ทำให้เกิดปัญหาภายในแอปพลิเคชันทางอุตสาหกรรมบางอย่าง
- โดยทั่วไป ความเร็วของโปรโตคอล HART นั้นเพียงพอสำหรับระบบตรวจสอบอย่างง่ายทุกที่ที่ตัวแปรกระบวนการไม่เปลี่ยนแปลงอย่างรวดเร็ว
แอปพลิเคชั่น
ดิ แอปพลิเคชันของโปรโตคอล HART รวมสิ่งต่อไปนี้
- โปรโตคอล HART ถูกใช้ทั่วโลกในการส่งและรับข้อมูลดิจิทัลด้วยการเดินสายแบบแอนะล็อกระหว่างอุปกรณ์อัจฉริยะและระบบควบคุม
- นี่เป็นโปรโตคอลยอดนิยมที่ใช้ในระบบอัตโนมัติทางอุตสาหกรรม
- โปรโตคอลนี้ใช้สำหรับวิเคราะห์อุปกรณ์อัจฉริยะเป็นหลัก
- มีการใช้กันอย่างแพร่หลายในระบบกระบวนการและเครื่องมือวัด
- โปรโตคอลการสื่อสารประเภทนี้เหมาะอย่างยิ่งสำหรับเครื่องมือหลายตัวแปรซึ่งรวมถึงเครื่องวัดการไหลของมวลทุกที่ที่สามารถสื่อสารการไหลเชิงปริมาตร การไหลของมวล ความหนาแน่น และอุณหภูมิไปยังระบบควบคุมผ่านสายเคเบิลเส้นเดียว
- โปรโตคอลนี้ได้รับการออกแบบมาเพื่อใช้ในการควบคุมกระบวนการทางอุตสาหกรรมและการประยุกต์ใช้การวัด
- โปรโตคอล HART ส่วนใหญ่ใช้ในอุตสาหกรรมกระบวนการเพื่อการสื่อสารระหว่างอุปกรณ์ต่างๆ
ดังนั้น นี่คือ การทำงานของโปรโตคอล HART . โปรโตคอลนี้เป็นมาตรฐานสากลที่ใช้สำหรับส่งและรับข้อมูลดิจิทัลผ่านสายแอนะล็อกระหว่างอุปกรณ์สมาร์ทฟิลด์ตลอดจนระบบตรวจสอบหรือควบคุม เช่น ระบบ DCS และ PLC โปรโตคอลการสื่อสารแบบสองทิศทางนี้ให้สิทธิ์ในการเข้าสู่ข้อมูลเพิ่มเติมระหว่างภาคสนามและตัวควบคุมโฮสต์ ตั้งแต่อุปกรณ์พกพาไปจนถึงระบบการจัดการสินทรัพย์หรือตัวควบคุมโรงงาน นี่คือคำถาม: โปรโตคอล HART เต็มรูปแบบคืออะไร?