โปรเซสเซอร์ Blackfin ได้รับการออกแบบ พัฒนา และทำการตลาดผ่าน Analog Devices & Intel ในชื่อ Micro Signal Architecture (MSA) สถาปัตยกรรมของโปรเซสเซอร์นี้ได้รับการประกาศในเดือนธันวาคม พ.ศ. 2543 และแสดงให้เห็นเป็นครั้งแรกที่ ESC ( ระบบสมองกลฝังตัว Conference) ในเดือนมิถุนายน 2544 โปรเซสเซอร์ Blackfin นี้ได้รับการออกแบบเป็นหลักเพื่อให้บรรลุข้อจำกัดด้านพลังงานและความต้องการด้านการคำนวณของแอปพลิเคชันเสียง วิดีโอ และการสื่อสารแบบฝังตัวในปัจจุบัน บทความนี้กล่าวถึงภาพรวมของก โปรเซสเซอร์แบล็คฟิน – สถาปัตยกรรมและการใช้งาน
โปรเซสเซอร์ Blackfin คืออะไร?
โปรเซสเซอร์ Blackfin เป็น 16 หรือ 32 บิต ไมโครโปรเซสเซอร์ ซึ่งรวมถึงฟังก์ชัน DSP แบบจุดตายตัวในตัวที่จัดหาให้ผ่าน MAC แบบ 16 บิต (คูณ-สะสม) เหล่านี้ โปรเซสเซอร์ ได้รับการออกแบบมาสำหรับสถาปัตยกรรมโปรเซสเซอร์ที่ใช้พลังงานต่ำเป็นหลัก ซึ่งสามารถเรียกใช้ระบบปฏิบัติการในขณะที่จัดการงานด้านตัวเลขที่ยากได้พร้อมกัน เช่น การเข้ารหัสวิดีโอ H.264 แบบเรียลไทม์
โปรเซสเซอร์นี้รวมเอาฟังก์ชันการประมวลผลสัญญาณ RISC 32 บิตและ 16 บิตคู่ของ MAC โดยใช้แอตทริบิวต์ที่พบในไมโครคอนโทรลเลอร์ที่ใช้งานทั่วไปได้อย่างง่ายดาย ดังนั้นการผสมผสานแอตทริบิวต์การประมวลผลนี้ทำให้ Blackfin Processors สามารถประสบความสำเร็จได้ดีเช่นเดียวกันทั้งในการประมวลผลการควบคุมและการประมวลผลสัญญาณ ความสามารถนี้ช่วยลดความยุ่งยากอย่างมากทั้งงานติดตั้งฮาร์ดแวร์และการออกแบบซอฟต์แวร์

คุณสมบัติครีบดำ:
- โปรเซสเซอร์นี้มีสถาปัตยกรรมชุดคำสั่งเดียว รวมถึงประสิทธิภาพการประมวลผลที่ตรงตาม/เหนือกว่ากลุ่มผลิตภัณฑ์ของ ตัวประมวลผลสัญญาณดิจิตอล หรือ DSP เพื่อให้ต้นทุน พลังงาน และประสิทธิภาพของหน่วยความจำดีขึ้น
- โปรเซสเซอร์สถาปัตยกรรม 16 หรือ 32 บิตนี้อนุญาตให้ใช้แอปพลิเคชันฝังตัวที่กำลังจะมาถึง
การประมวลผลมัลติมีเดีย สัญญาณ และการควบคุมภายในคอร์เดียว - มันเพิ่มประสิทธิภาพการทำงานของนักพัฒนา
- มีประสิทธิภาพที่ปรับแต่งได้ตลอดทั้งการจัดการพลังงานแบบไดนามิกสำหรับการใช้พลังงานหรือการประมวลผลสัญญาณ
- มันถูกนำไปใช้อย่างรวดเร็วมากในการออกแบบต่างๆ ซึ่งได้รับการสนับสนุนง่ายๆ จาก toolchains ต่างๆ เช่นเดียวกับระบบปฏิบัติการ
- ต้องมีการเพิ่มประสิทธิภาพขั้นต่ำเนื่องจากสภาพแวดล้อมการพัฒนาของซอฟต์แวร์ที่ทรงพลังควบคู่กับประสิทธิภาพหลัก
- โปรเซสเซอร์ Blackfin รองรับเครื่องมือการพัฒนาชั้นนำของอุตสาหกรรม
- ประสิทธิภาพของโปรเซสเซอร์นี้ & พลังครึ่งหนึ่งของ DSP ที่แข่งขันกันช่วยให้มีคุณสมบัติขั้นสูงและแอปพลิเคชันใหม่
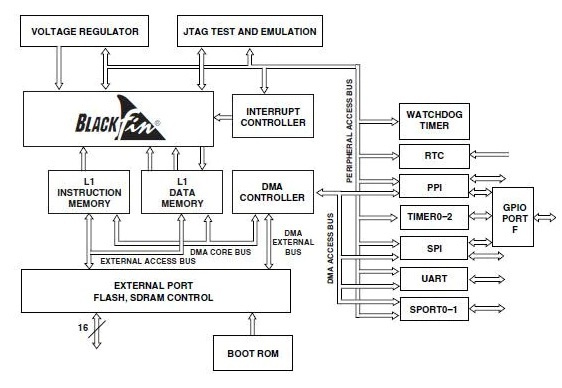
สถาปัตยกรรมโปรเซสเซอร์ Blackfin
โปรเซสเซอร์ Blackfin ให้ทั้งฟังก์ชันการทำงานของหน่วยไมโครคอนโทรลเลอร์ & การประมวลผลสัญญาณดิจิตอล ภายในโปรเซสเซอร์เดียวโดยให้ความยืดหยุ่น ดังนั้นโปรเซสเซอร์นี้จึงมีตัวประมวลผล SIMD (คำสั่งเดียวหลายข้อมูล) รวมถึงคุณสมบัติบางอย่าง เช่น ความยาวผันแปร เสี่ยง คำแนะนำ, ตัวจับเวลาจ้องจับผิด, PLL บนชิป, หน่วยจัดการหน่วยความจำ, นาฬิกาเรียลไทม์, พอร์ตอนุกรมที่มี 100 Mbps, ยูอาร์ที ตัวควบคุม & เอสพีไอ พอร์ต
MMU รองรับหลายรายการ ดีเอ็มเอ ช่องทางในการถ่ายโอนข้อมูลระหว่างอุปกรณ์ต่อพ่วง & ระบบย่อยหน่วยความจำ FLASH, SDRAM และ SRAM นอกจากนี้ยังรองรับแคชข้อมูลและคำสั่งบนชิปที่กำหนดค่าได้ โปรเซสเซอร์ Blackfin เป็นฮาร์ดแวร์ธรรมดาที่รองรับการดำเนินการทางคณิตศาสตร์ 8, 16 และ 32 บิต
สถาปัตยกรรม Blackfin อิงตามสถาปัตยกรรมของสัญญาณไมโครเป็นหลัก และได้รับการพัฒนาร่วมกันโดย ADI (อุปกรณ์อะนาล็อก) และ Intel ซึ่งประกอบด้วยชุดคำสั่ง RISC 32 บิต และชุดคำสั่งวิดีโอ 8 บิตพร้อมชุดคำสั่งทวีคูณ 16 บิตคู่ 16 บิต (MAC) หน่วย

อุปกรณ์แอนะล็อกสามารถบรรลุความสมดุลระหว่างข้อกำหนด DSP และ MCU ผ่านสถาปัตยกรรมชุดคำสั่งของ Blackfin โดยทั่วไปแล้ว โปรเซสเซอร์ Blackfin จะทำงานควบคู่กับเครื่องมือพัฒนาซอฟต์แวร์ VisualDSP++ อันทรงพลัง แต่ตอนนี้ด้วยการใช้ C หรือ C++ คุณสามารถสร้างโค้ดที่มีประสิทธิภาพสูงได้ง่ายกว่าเมื่อก่อนมาก สำหรับความต้องการตามเวลาจริง การสนับสนุนระบบปฏิบัติการเป็นสิ่งสำคัญ ดังนั้น Blackfin จึงรองรับหมายเลข ของระบบปฏิบัติการและการป้องกันหน่วยความจำ โปรเซสเซอร์ Blackfin มีทั้งแบบ single-core เช่น BF533, BF535 & BF537 และ dual-core เช่นรุ่น BF561
สถาปัตยกรรมโปรเซสเซอร์ Blackfin ประกอบด้วยอุปกรณ์ต่อพ่วงบนชิปที่แตกต่างกัน เช่น PPI (Parallel Peripheral Interface), SPORTS (Serial Ports), SPI (Serial Peripheral Interface), UART (Universal Asynchronous Receiver Transmitter), General-purpose timer, RTC (Real-Time นาฬิกา), ตัวจับเวลา Watchdog, I/O อเนกประสงค์ (การตั้งค่าสถานะแบบตั้งโปรแกรมได้), อินเทอร์เฟซเครือข่ายพื้นที่ควบคุม (CAN) , อีเธอร์เน็ต MAC, Peripheral DMAs -12, Memory to Memory DMAs -2 รวมถึง Handshake DMA, TWI (Two-Wire Interface) Controller, a Debug หรือ เจแท็ก อินเทอร์เฟซ & ตัวจัดการเหตุการณ์ด้วย 32 ขัดจังหวะ อินพุต อุปกรณ์ต่อพ่วงทั้งหมดนี้ในสถาปัตยกรรมเชื่อมต่อกันง่ายๆ ผ่านบัสแบนด์วิธสูงต่างๆ ไปยังคอร์ ดังนั้นคำอธิบายของอุปกรณ์ต่อพ่วงเหล่านี้บางส่วนจะได้รับด้านล่าง
PPI หรือ Parallel Peripheral Interface
โปรเซสเซอร์ Blackfin ให้ค่า PPI ซึ่งเรียกอีกอย่างว่า Parallel Peripheral Interface อินเทอร์เฟซนี้เชื่อมต่อโดยตรงกับตัวแปลงแอนะล็อกเป็นดิจิทัลแบบขนานและดิจิทัลเป็นอะนาล็อก ตัวเข้ารหัสวิดีโอ และตัวถอดรหัส และยังเชื่อมต่อกับอุปกรณ์ต่อพ่วงอเนกประสงค์อื่นๆ
อินเทอร์เฟซนี้มีพิน CLK อินพุตเฉพาะ พินการซิงโครไนซ์เฟรมสามพิน & พินข้อมูล 16 พิน ที่นี่ พิน CLK อินพุตรองรับอัตราข้อมูลแบบขนานเท่ากับครึ่งหนึ่งของความเร็ว CLK ของระบบ โหมด ITU-R 656 ที่แตกต่างกันสามโหมดรองรับเฉพาะ Active Video, Vertical Blanking & Complete field
โหมดวัตถุประสงค์ทั่วไปของ PPI มีให้เพื่อให้เหมาะกับแอปพลิเคชันการรับส่งข้อมูลและการเก็บข้อมูลที่แตกต่างกัน ดังนั้นโหมดเหล่านี้จึงถูกแยกออกเป็นประเภทหลัก การรับข้อมูลผ่านเฟรมซิงค์ที่สร้างภายใน, การส่งข้อมูลผ่านเฟรมซิงค์ที่สร้างภายใน, การส่งข้อมูลผ่านเฟรมซิงค์ที่สร้างจากภายนอก และข้อมูลที่รับผ่านเฟรมซิงค์ที่สร้างจากภายนอก
กีฬา
โปรเซสเซอร์ Blackfin มีพอร์ตซีเรียลซิงโครนัสสองแชนเนล SPORT0 & SPORT1 ที่ใช้สำหรับการสื่อสารแบบอนุกรมและมัลติโปรเซสเซอร์ ดังนั้นนี่คือพอร์ตอนุกรมความเร็วสูงและซิงโครนัสที่รองรับ I²S , TDM และโหมดการจัดเฟรมอื่น ๆ ที่กำหนดค่าได้สำหรับการเชื่อมต่อ DAC , ADCs, FPGA และโปรเซสเซอร์อื่นๆ
SPI หรือพอร์ตเชื่อมต่ออุปกรณ์ต่อพ่วงแบบอนุกรม
โปรเซสเซอร์ Blackfin มีพอร์ต SPI ที่ช่วยให้โปรเซสเซอร์สนทนากับอุปกรณ์ที่รองรับ SPI ต่างๆ อินเทอร์เฟซนี้ใช้พินสามพินในการส่งข้อมูล พินข้อมูล-2 และพิน CLK หนึ่งพิน พินอินพุตและเอาท์พุตที่เลือกของพอร์ต SPI นั้นให้ SSI แบบฟูลดูเพล็กซ์ (อินเทอร์เฟซซีเรียลแบบซิงโครนัส) ที่รองรับทั้งโหมดมาสเตอร์และสเลฟ รวมถึงสภาพแวดล้อมแบบหลายมาสเตอร์ อัตราการถ่ายโอนข้อมูลของพอร์ต SPI และเฟสนาฬิกาหรือขั้วสามารถตั้งโปรแกรมได้ พอร์ตนี้มีตัวควบคุม DMA ในตัวซึ่งรองรับการส่ง/รับสตรีมข้อมูล
ตัวจับเวลา
โปรเซสเซอร์ Blackfin มีตัวจับเวลาที่ตั้งโปรแกรมได้ 9 ตัว ตัวจับเวลาเหล่านี้สร้างการขัดจังหวะให้กับแกนประมวลผลสำหรับการจัดเตรียมเหตุการณ์เป็นระยะซึ่งมีไว้สำหรับการซิงโครไนซ์กับนาฬิกาของโปรเซสเซอร์หรือสัญญาณภายนอก
ยูอาร์ที
คำว่า UART ย่อมาจากพอร์ต 'เครื่องส่งสัญญาณตัวรับแบบอะซิงโครนัสสากล' โปรเซสเซอร์ Blackfin มีพอร์ต UART แบบฮาล์ฟดูเพล็กซ์ 2 พอร์ต ซึ่งเหมาะอย่างยิ่งสำหรับ UART มาตรฐานของพีซี พอร์ตเหล่านี้จัดเตรียมอินเทอร์เฟซ UART พื้นฐานให้กับโฮสต์หรืออุปกรณ์ต่อพ่วงอื่น ๆ เพื่อให้การถ่ายโอนข้อมูลอนุกรมแบบอะซิงโครนัสที่รองรับ DMA, ฮาล์ฟดูเพล็กซ์
พอร์ต UART ประกอบด้วย 5 ถึง 8 บิตข้อมูล และ 1 หรือ 2 สต็อปบิต และรองรับการทำงาน 2 โหมด เช่น Programmed I/O และ DMA ในโหมดแรก โปรเซสเซอร์จะส่งหรือรับข้อมูลผ่านการอ่าน/เขียนรีจิสเตอร์ที่แมป I/O โดยที่ข้อมูลจะถูกบัฟเฟอร์สองครั้งทั้งในการส่งและรับ ในโหมดที่สอง ตัวควบคุม DMA จะส่งและรับข้อมูล และลดจำนวนการขัดจังหวะที่จำเป็นในการส่งข้อมูลจาก & ไปยังหน่วยความจำ
RTC หรือนาฬิกาเรียลไทม์
นาฬิกาตามเวลาจริงของโปรเซสเซอร์ blackfin มีคุณสมบัติที่แตกต่างกัน เช่น นาฬิกาจับเวลา เวลาปัจจุบัน และนาฬิกาปลุก ดังนั้น นาฬิกาเรียลไทม์จึงถูกโอเวอร์คล็อกด้วยคริสตัล 32.768 kHz ภายนอกตัวประมวลผล Blackfin RTC ภายในโปรเซสเซอร์มีพินพาวเวอร์ซัพพลาย ซึ่งสามารถคงกำลังและโอเวอร์คล็อกได้แม้ว่าส่วนอื่นๆ ของโปรเซสเซอร์ Blackfin จะอยู่ในสภาพพลังงานต่ำ นาฬิกาตามเวลาจริงมีตัวเลือกการขัดจังหวะที่ตั้งโปรแกรมได้มากมาย ความถี่ CLK อินพุต 32.768 kHz ถูกแยกออกเป็นสัญญาณ 1 Hz ผ่าน Prescaler เช่นเดียวกับอุปกรณ์อื่นๆ นาฬิกาตามเวลาจริงสามารถปลุกโปรเซสเซอร์ Blackfin จากโหมด Deep Sleep/โหมด Sleep
วอชด็อก ไทม์เมอร์
โปรเซสเซอร์ Blackfin มีตัวจับเวลาจ้องจับผิด 32 บิต ใช้เพื่อเรียกใช้ฟังก์ชันจ้องจับผิดซอฟต์แวร์ ดังนั้นโปรแกรมเมอร์จึงเริ่มต้นค่านับของตัวจับเวลาที่อนุญาตให้มีการขัดจังหวะที่เหมาะสม จากนั้นจึงอนุญาตตัวจับเวลา หลังจากนั้น ซอฟต์แวร์จะต้องโหลดตัวนับใหม่ก่อนที่จะนับจากค่าที่ตั้งโปรแกรมไว้เป็น '0'
GPIO หรือ I/O วัตถุประสงค์ทั่วไป
GPIO คือพินสัญญาณดิจิทัลที่ใช้เป็นอินพุต เอาต์พุต หรือทั้งสองอย่าง & ถูกควบคุมผ่านซอฟต์แวร์ โปรเซสเซอร์ Blackfin ประกอบด้วยพิน GPIO (I/O สำหรับวัตถุประสงค์ทั่วไป) 48 ทิศทางสองทิศทางในโมดูล GPIO 3 โมดูลแยกกัน เช่น PORTFIO, PORTHIO & PORTGIO ที่เชื่อมต่อกับพอร์ต G, พอร์ต H และพอร์ต F ตามลำดับ พินพอร์ตสำหรับวัตถุประสงค์ทั่วไปทุกตัวจะถูกควบคุมแยกกันผ่านการจัดการสถานะ การควบคุมพอร์ต & รีจิสเตอร์อินเตอร์รัปต์ เช่น GPIO DCR, GPIO CSR, GPIO IMR และ GPIO ISR
อีเธอร์เน็ต MAC
อุปกรณ์ต่อพ่วง Ethernet MAC ในโปรเซสเซอร์ Blackfin ให้ 10 ถึง 100 Mb/s ระหว่าง MII (Media Independent Interface) และระบบย่อยอุปกรณ์ต่อพ่วงของ Blackfin MAC ใช้งานได้ทั้งในโหมด Full-Duplex และ Half-Duplex ตัวควบคุมการเข้าถึงสื่อถูกโอเวอร์คล็อกภายในจากพิน CLKIN ของโปรเซสเซอร์
หน่วยความจำ
หน่วยความจำของสถาปัตยกรรม Blackfin Processor มีไว้สำหรับบล็อกหน่วยความจำทั้งระดับ 1 และระดับ 2 ในการใช้งานอุปกรณ์ หน่วยความจำของ L1 เช่น หน่วยความจำข้อมูลและคำสั่งนั้นเชื่อมต่อกับคอร์โปรเซสเซอร์โดยตรง ทำงานที่ความเร็ว CLK ของระบบอย่างสมบูรณ์และให้ประสิทธิภาพสูงสุดของระบบสำหรับเซ็กเมนต์อัลกอริทึมเวลาวิกฤต หน่วยความจำ L2 เช่นหน่วยความจำ SRAM มีขนาดใหญ่กว่าซึ่งให้ประสิทธิภาพลดลงเล็กน้อย แต่ก็ยังเร็วกว่าเมื่อเทียบกับหน่วยความจำแบบไม่ใช้ชิป
โครงสร้างของหน่วยความจำ L1 ถูกนำมาใช้เพื่อให้ประสิทธิภาพที่จำเป็นสำหรับการประมวลผลสัญญาณในขณะที่เสนอโปรแกรมในไมโครคอนโทรลเลอร์ สิ่งนี้ทำได้โดยการอนุญาตให้จัดหน่วยความจำ L1 เป็น SRAM, แคช หรือใช้ทั้งสองอย่างร่วมกัน
ด้วยการสนับสนุนแคชและโมเดลการเขียนโปรแกรม SRAM ผู้ออกแบบระบบจึงกำหนดชุดข้อมูลการประมวลผลสัญญาณตามเวลาจริงที่สำคัญซึ่งต้องการเวลาแฝงต่ำและแบนด์วิธสูงลงใน SRAM ในขณะที่จัดเก็บงานการควบคุมแบบเรียลไทม์หรือ OS ภายในหน่วยความจำแคช
โหมดการบูต
โปรเซสเซอร์ Blackfin มีหกกลไกสำหรับการโหลดหน่วยความจำคำสั่ง L1 ภายในโดยอัตโนมัติหลังจากรีเซ็ต ดังนั้นโหมดการบู๊ตที่แตกต่างกันจึงรวมถึง; โหมดบูตจากหน่วยความจำแฟลชภายนอก 8 บิตและ 16 บิต หน่วยความจำ SPI อนุกรม อุปกรณ์โฮสต์ SPI, UART, หน่วยความจำ TWI อนุกรม, โฮสต์ TWI และดำเนินการจากหน่วยความจำภายนอก 16 บิต, บายพาสชุดบูต สำหรับแต่ละโหมดการบูต 6 โหมดแรก ส่วนหัวขนาด 10 ไบต์จะถูกอ่านจากอุปกรณ์หน่วยความจำภายนอก ดังนั้น ส่วนหัวจึงระบุหมายเลข จำนวนไบต์ที่จะส่ง & ที่อยู่ปลายทางของหน่วยความจำ บล็อกหน่วยความจำหลายบล็อกอาจถูกโหลดผ่านซีรีส์การบูตใดๆ เมื่อโหลดบล็อกทั้งหมดแล้ว การดำเนินการของโปรแกรมจะเริ่มต้นจากจุดเริ่มต้นของคำสั่ง L1 SRAM
โหมดการระบุที่อยู่
โหมดการกำหนดแอดเดรสของโปรเซสเซอร์แบล็กฟินกำหนดวิธีการเข้าถึงหน่วยความจำและการกำหนดแอดเดรสแต่ละรายการเพื่อระบุตำแหน่ง โหมดการกำหนดแอดเดรสที่ใช้ในโปรเซสเซอร์แบล็กฟินคือการระบุแอดเดรสโดยอ้อม, การเพิ่ม/ลดอัตโนมัติ, การปรับเปลี่ยนภายหลัง, การทำดัชนีด้วยการชดเชยทันที, บัฟเฟอร์แบบวงกลม และการย้อนกลับของบิต
ที่อยู่ทางอ้อม
ในโหมดนี้ ช่องที่อยู่ภายในคำสั่งจะรวมตำแหน่งของหน่วยความจำหรือรีจิสเตอร์ ทุกที่ที่มีที่อยู่ของตัวถูกดำเนินการที่มีประสิทธิภาพ ที่อยู่นี้แบ่งออกเป็นสองประเภทเช่น Register Indirect & Memory Indirect
ตัวอย่างเช่น โหลด R1, @300
ในคำแนะนำข้างต้น ที่อยู่ที่ใช้งานได้จริงจะถูกเก็บไว้ที่ตำแหน่งหน่วยความจำ 300
การเพิ่ม/ลดที่อยู่อัตโนมัติ
การเพิ่มที่อยู่โดยอัตโนมัติเพียงแค่อัปเดตตัวชี้และการลงทะเบียนดัชนีหลังจากด้านขวาของรายการ จำนวนที่เพิ่มขึ้นส่วนใหญ่ขึ้นอยู่กับขนาดของขนาดคำ การเข้าถึงคำแบบ 32 บิตสามารถส่งผลให้ตัวชี้อัปเดตด้วย '4' การเข้าถึงคำแบบ 16 บิตจะอัปเดตตัวชี้ด้วย '2' และการเข้าถึงด้วยคำแบบ 8 บิตจะอัปเดตตัวชี้ด้วย '1' การดำเนินการอ่านของทั้ง 8 บิตและ 16 บิตอาจระบุเนื้อหาที่ขยายเป็นศูนย์/เครื่องหมายขยายเนื้อหาลงในรีจิสเตอร์เป้าหมาย การลงทะเบียนตัวชี้ส่วนใหญ่จะใช้สำหรับการเข้าถึง 8, 16 และ 32 บิตในขณะที่การลงทะเบียนดัชนีใช้สำหรับการเข้าถึง 16 และ 32 บิตเท่านั้น
ตัวอย่างเช่น: R0 = W [ P1++ ] (Z) ;
ในคำแนะนำข้างต้น คำ 16 บิตจะโหลดลงในรีจิสเตอร์ปลายทาง 32 บิตจากแอดเดรสที่ชี้ผ่านพอยเตอร์รีจิสเตอร์ 'P1' หลังจากนั้น ตัวชี้จะเพิ่มขึ้นเป็น 2 และคำคือ '0' ขยายเพื่อเติมการลงทะเบียนปลายทางแบบ 32 บิต
ในทำนองเดียวกัน การลดลงอัตโนมัติจะทำงานโดยการลดที่อยู่หลังจากสิทธิ์ของรายการ
ตัวอย่างเช่น: R0 = [ I2– ] ;
ในคำแนะนำข้างต้น ค่า 32 บิตจะโหลดลงในรีจิสเตอร์ปลายทาง และลดรีจิสเตอร์ดัชนีลง 4
การแก้ไขที่อยู่หลังการแก้ไข
การระบุที่อยู่ประเภทนี้ใช้ค่าภายในการลงทะเบียน Index/Pointer เช่น ที่อยู่ที่มีประสิทธิภาพ หลังจากนั้นจะแก้ไขด้วยเนื้อหาการลงทะเบียน รีจิสเตอร์ดัชนีจะเปลี่ยนแปลงได้ง่ายๆ ด้วยรีจิสเตอร์ที่แก้ไข ในขณะที่รีจิสเตอร์พอยน์เตอร์ถูกเปลี่ยนโดยรีจิสเตอร์พอยน์เตอร์อื่นๆ เช่นเดียวกับรีจิสเตอร์ปลายทาง การกำหนดแอดเดรสประเภทหลังการแก้ไขไม่รองรับรีจิสเตอร์พอยน์เตอร์
ตัวอย่างเช่น: R3 = [ P1++P2 ] ;
ในคำแนะนำข้างต้น ค่า 32 บิตจะถูกโหลดลงในรีจิสเตอร์ 'R3' และพบภายในตำแหน่งของหน่วยความจำที่ชี้โดยรีจิสเตอร์ 'P1' หลังจากนั้น ค่าภายในรีจิสเตอร์ 'P2' จะถูกเพิ่มไปยังค่าภายในรีจิสเตอร์ P1
จัดทำดัชนีด้วยการชดเชยทันที
การทำดัชนีแอดเดรสทำให้โปรแกรมสามารถรับค่าจากตารางข้อมูลได้ การลงทะเบียนตัวชี้ถูกเปลี่ยนโดยฟิลด์ทันที หลังจากนั้นจะถูกใช้เป็นที่อยู่ที่มีประสิทธิภาพ ดังนั้นค่ารีจิสเตอร์พอยน์เตอร์จะไม่ถูกอัพเดต
ตัวอย่างเช่น ถ้า P1 = 0x13 ดังนั้น [P1 + 0x11] จะมีประสิทธิภาพเทียบเท่ากับ [0x24] ซึ่งเชื่อมโยงกับการเข้าถึงทั้งหมด
การระบุที่อยู่แบบย้อนกลับบิต
สำหรับอัลกอริทึมบางโปรแกรมจำเป็นต้องมีการระบุที่อยู่แบบย้อนกลับของบิตเพื่อให้ได้ผลลัพธ์ตามลำดับโดยเฉพาะอย่างยิ่งสำหรับการคำนวณ FFT (Fast Fourier Transform) เพื่อให้เป็นไปตามข้อกำหนดของอัลกอริทึมเหล่านี้ คุณลักษณะการระบุที่อยู่แบบกลับบิตของเครื่องสร้างที่อยู่ข้อมูลซ้ำๆ ทำให้สามารถแบ่งชุดข้อมูลย่อยและจัดเก็บข้อมูลนี้ภายในลำดับการกลับบิตได้
ที่อยู่บัฟเฟอร์แบบวงกลม
โปรเซสเซอร์ Blackfin มีคุณสมบัติ เช่น แอดเดรสแบบวงกลมที่เป็นทางเลือก ซึ่งเพียงแค่เพิ่มการลงทะเบียนดัชนีตามช่วงแอดเดรสที่กำหนดไว้ล่วงหน้า หลังจากนั้นจะรีเซ็ตการลงทะเบียนดัชนีโดยอัตโนมัติเพื่อทำซ้ำช่วงนั้น ดังนั้นคุณลักษณะนี้จึงช่วยเพิ่มประสิทธิภาพให้กับลูปอินพุต/เอาต์พุตโดยเพียงแค่ถอดตัวชี้ดัชนีที่อยู่ออกทุกครั้ง
การกำหนดแอดเดรสบัฟเฟอร์แบบวงกลมมีประโยชน์มากเมื่อโหลดหรือจัดเก็บสตริงบล็อกข้อมูลขนาดคงที่ซ้ำๆ เนื้อหาของบัฟเฟอร์แบบวงกลมต้องเป็นไปตามเงื่อนไขเหล่านี้:
- ความยาวสูงสุดของบัฟเฟอร์แบบวงกลมควรเป็นตัวเลขที่ไม่ได้ลงนามซึ่งมีขนาดต่ำกว่า 231
- ขนาดของโมดิฟายเออร์ต้องต่ำกว่าความยาวของบัฟเฟอร์วงกลม
- ตำแหน่งแรกของตัวชี้ 'I' ต้องอยู่ในบัฟเฟอร์วงกลมที่กำหนดโดยความยาว 'L' & ฐาน 'B'
หากไม่เป็นไปตามเงื่อนไขใด ๆ ข้างต้น แสดงว่าไม่ได้ระบุลักษณะการทำงานของโปรเซสเซอร์
ลงทะเบียนไฟล์ของ Blackfin Processor
โปรเซสเซอร์ Blackfin ประกอบด้วยไฟล์ลงทะเบียนสามไฟล์เช่น; ไฟล์ลงทะเบียนข้อมูล, ไฟล์ลงทะเบียนตัวชี้ & ลงทะเบียน DAG
- ไฟล์ลงทะเบียนข้อมูลรวบรวมตัวถูกดำเนินการโดยใช้บัสข้อมูลที่ใช้สำหรับหน่วยคำนวณและเก็บผลลัพธ์การคำนวณ
- ไฟล์รีจิสเตอร์พอยน์เตอร์ประกอบด้วยพอยน์เตอร์ที่ใช้สำหรับการระบุการดำเนินการ
- การลงทะเบียน DAG จัดการบัฟเฟอร์แบบวงกลมที่ไม่มีค่าโสหุ้ยที่ใช้สำหรับการดำเนินการ DSP
โปรเซสเซอร์ Blackfin ให้การจัดการพลังงานและประสิทธิภาพระดับเฟิร์สคลาส เหล่านี้ได้รับการออกแบบด้วยวิธีการออกแบบแรงดันไฟฟ้าต่ำและพลังงานต่ำซึ่งสามารถเปลี่ยนแปลงทั้งแรงดันไฟฟ้าและความถี่ในการทำงานเพื่อลดการใช้พลังงานโดยรวมลงอย่างมาก ดังนั้นสิ่งนี้อาจส่งผลให้การใช้พลังงานลดลงอย่างมาก เมื่อเทียบกับการเปลี่ยนความถี่ในการทำงานเพียงอย่างเดียว ดังนั้นสิ่งนี้จึงช่วยให้อายุการใช้งานแบตเตอรี่ยาวนานขึ้นสำหรับเครื่องใช้ไฟฟ้า
โปรเซสเซอร์ Blackfin รองรับหน่วยความจำภายนอกต่างๆ เช่น DDR-SDRAM, SDRAM, NAND flash, SRAM & NOR flash โปรเซสเซอร์ Blackfin บางรุ่นยังประกอบด้วยอินเทอร์เฟซการจัดเก็บข้อมูลจำนวนมาก เช่น SD/SDIO และ ATAPI นอกจากนี้ยังสามารถรองรับหน่วยความจำ 100 เมกะไบต์ภายในพื้นที่ของหน่วยความจำภายนอก
ข้อดี
เดอะ ข้อดีของโปรเซสเซอร์ Blackfin รวมสิ่งต่อไปนี้
- โปรเซสเซอร์ Blackfin ให้ประโยชน์พื้นฐานแก่ผู้ออกแบบระบบ
- โปรเซสเซอร์ Blackfin มอบความยืดหยุ่นของซอฟต์แวร์และความสามารถในการปรับขนาดสำหรับแอปพลิเคชันแบบคอนเวอร์เจนต์ เช่น การประมวลผลเสียง วิดีโอ เสียงและภาพในหลายรูปแบบ การรักษาความปลอดภัยตามเวลาจริง การประมวลผลการควบคุม และการประมวลผลแพ็กเก็ตเบสแบนด์แบบมัลติโหมด
- ความสามารถในการประมวลผลการควบคุมที่มีประสิทธิภาพและการประมวลผลสัญญาณประสิทธิภาพสูงช่วยให้ตลาดและแอปพลิเคชันใหม่ ๆ แตกต่างกัน
- DPM (Dynamic Power Management) ช่วยให้ผู้ออกแบบระบบสามารถปรับเปลี่ยนการใช้พลังงานของอุปกรณ์โดยเฉพาะตามความต้องการของระบบปลายทาง
- โปรเซสเซอร์เหล่านี้ช่วยลดเวลาและต้นทุนในการพัฒนาได้อย่างมาก
แอพพลิเคชั่น
เดอะ แอพพลิเคชั่นของโปรเซสเซอร์ Blackfin รวมสิ่งต่อไปนี้
- โปรเซสเซอร์ Blackfin เหมาะอย่างยิ่งสำหรับการใช้งานหลายประเภท เช่น ADAS (ระบบช่วยเหลือผู้ขับขี่ยานยนต์ขั้นสูง) , ระบบเฝ้าระวังหรือรักษาความปลอดภัย & วิชันซิสเต็มอุตสาหกรรม
- แอปพลิเคชัน Blackfin รวมถึงระบบควบคุมเซอร์โวมอเตอร์ อิเล็กทรอนิกส์ยานยนต์ ระบบตรวจสอบ และอุปกรณ์มัลติมีเดียสำหรับผู้บริโภค
- โปรเซสเซอร์เหล่านี้ทำหน้าที่ประมวลผลไมโครคอนโทรลเลอร์และสัญญาณ
- สิ่งเหล่านี้ใช้สำหรับเสียง การควบคุมกระบวนการ ยานยนต์ การทดสอบ การวัด ฯลฯ
- โปรเซสเซอร์ Blackfin ใช้ในแอปพลิเคชันการประมวลผลสัญญาณ เช่น บรอดแบนด์ไร้สาย การสื่อสารเคลื่อนที่ และอุปกรณ์อินเทอร์เน็ตที่รองรับเสียงหรือวิดีโอ
- Blackfin ใช้ในแอปพลิเคชันแบบคอนเวอร์เจนต์ เช่น เครือข่ายและสื่อสตรีมมิ่ง ความบันเทิงภายในบ้านแบบดิจิทัล ระบบเทเลเมติกส์ในรถยนต์ อินโฟเทนเมนท์ ทีวีเคลื่อนที่ วิทยุดิจิทัล ฯลฯ
- โปรเซสเซอร์ Blackfin เป็นโปรเซสเซอร์ฝังตัวที่มีประสิทธิภาพด้านพลังงานและประสิทธิภาพสูงสุดที่ใช้ในแอปพลิเคชัน ไม่ว่าจะเป็นเสียง เสียง วิดีโอ เบสแบนด์หลายโหมด การประมวลผลภาพ การประมวลผลแพ็กเก็ต การรักษาความปลอดภัยแบบเรียลไทม์ และการประมวลผลการควบคุมมีความสำคัญ
ดังนั้นนี่คือ ภาพรวมของ Blackfin Processor – สถาปัตยกรรม ข้อดี และการใช้งาน โปรเซสเซอร์นี้ทำหน้าที่ประมวลผลสัญญาณและไมโครคอนโทรลเลอร์ นี่เป็นคำถามสำหรับคุณ โปรเซสเซอร์คืออะไร?