บทความนี้อธิบายวงจรรถติดตามสายแบบง่ายๆหรือที่เรียกว่ารถติดตามสายโดยใช้แอมป์เพียงไม่กี่ตัวและส่วนประกอบอื่น ๆ อีกสองสามชิ้นโดยไม่ต้องใช้ Arduino หรือไมโครคอนโทรลเลอร์ที่ซับซ้อน
Line Follower Vehicle คืออะไร
รถติดตามสายเป็นรูปแบบของ Automatic Guided Vehicle (AGV) ซึ่งทำงานโดยตรวจจับเส้นสีขาวลากหรือฝังอยู่บนพื้น สัญญาณจากเครื่องตรวจจับจะสั่งให้ล้อที่มีเครื่องยนต์หมุนและปรับตามเส้นโดยอัตโนมัติทำให้รู้สึกว่ารถกำลังแล่นตามเส้น ดังนั้นชื่อผู้ติดตาม
โดยทั่วไปเครื่องตรวจจับจะอยู่ในรูปแบบของ ตัวต้านทานภาพเช่น LDR หรืออุปกรณ์ตรวจจับแสงเซมิคอนดักเตอร์เช่น ไดโอดภาพถ่ายหรือทรานซิสเตอร์ภาพถ่าย .
สองสามอย่างนั้น เครื่องตรวจจับแสง ใช้เพื่อตรวจจับแสงสะท้อนจากเส้นสีขาวและสลับวงจรทรานซิสเตอร์หรือเครื่องเปรียบเทียบที่ใช้แอมป์ซึ่งจะควบคุมมอเตอร์ล้อของยานพาหนะให้เคลื่อนที่ตามการเลี้ยวและเส้นโค้งของเส้นสีขาวบนพื้น
การใช้เครื่องเปรียบเทียบหน้าต่าง
ในวงจรยานพาหนะผู้ติดตามสายที่เสนอเราได้ใช้ เครื่องเปรียบเทียบ op amp กำลังมีส่วนร่วมของมอเตอร์ในการปรับสมดุล
ออปแอมป์ถูกยึดเป็นหน้าต่าง ผู้แบ่งปัน . ตามชื่อที่แนะนำตัวเปรียบเทียบหน้าต่างจะเปรียบเทียบสัญญาณอินพุตจากเครื่องตรวจจับที่มีการอ้างอิงแรงดันไฟฟ้ามากสองค่าซึ่งเป็นเกณฑ์ 'หน้าต่าง' ตราบใดที่ระดับสัญญาณอินพุตอยู่ภายในเกณฑ์อ้างอิง 'หน้าต่าง' เอาต์พุตของออปแอมป์ทั้งสองจะรักษาตรรกะที่สูงตลอดทั้งเอาต์พุต
อย่างไรก็ตามในกรณีที่สัญญาณอินพุตมีแนวโน้มที่จะข้ามเกณฑ์อ้างอิงเอาต์พุตของออปแอมป์ที่เกี่ยวข้องจะอยู่ในระดับต่ำส่งผลให้เอาต์พุตตรงข้ามจากออปแอมป์ ความไม่สมดุลนี้จะแจ้งให้อุปกรณ์เอาต์พุตแก้ไขสถานการณ์โดยการสลับโหลดอย่างเหมาะสม
วงจรทำงานอย่างไร
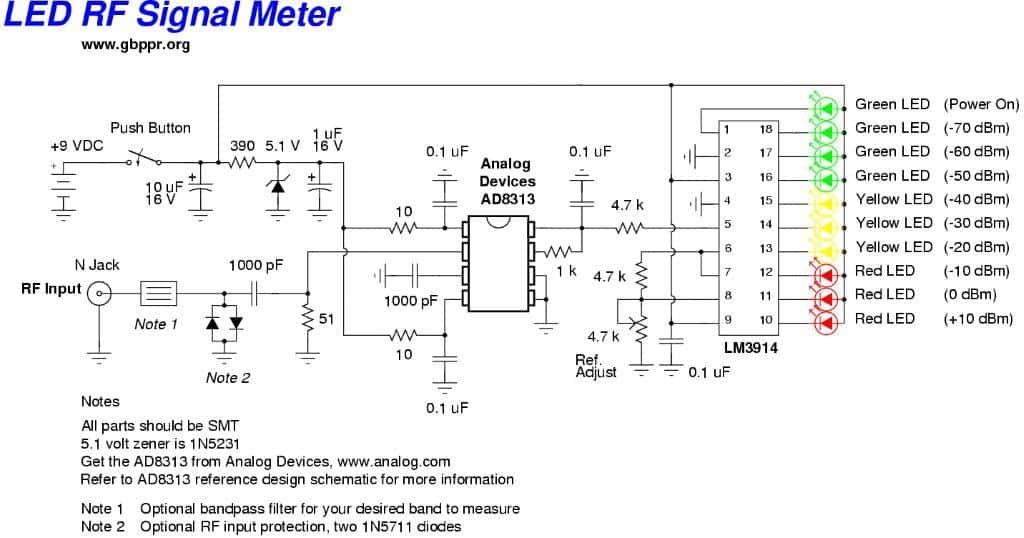
อ้างอิงจากแผนภาพวงจรของรถติดตามสายด้านล่างเราจะเห็นแอมป์สองตัวที่กำหนดค่าเป็นตัวเปรียบเทียบหน้าต่าง

ออปแอมป์สามารถมาจาก IC LM358 หรือ LM324
op amp ด้านบนมีการต่อสายเพื่อควบคุมขีด จำกัด threshold ด้านบนในขณะที่ op amp ด้านล่างเชื่อมต่อเพื่อควบคุมขีด จำกัด threshold ด้านล่าง
อินพุตกลับด้านของ op amp A1 และอินพุตที่ไม่กลับด้านของ op amp A2 ถูกยึดด้วยแรงดันอ้างอิงคงที่
อินพุตแบบไม่กลับด้านของ op amp A1 และอินพุทกลับด้านของ op amp A2 จะถูกผูกเข้าด้วยกันและใช้สำหรับตรวจจับความแปรผันของสัญญาณอินพุตจากเครื่องตรวจจับแสง
ตัวต้านทานแบบพึ่งพาแสงสองตัวคือ LDR1 และ LDR2 ซึ่งทำหน้าที่เหมือนอุปกรณ์ที่ไวต่อแสงถูกวางตำแหน่งเป็นเครื่องตรวจจับแสงเพื่อให้ได้รับแสงสะท้อนจากเส้นสีขาวอย่างสม่ำเสมอ
ตราบใดที่ไฟบน LDR มีความสูงเพียงพอและสม่ำเสมอพิน 3 ของ A1 จะยังคงสูงกว่าพิน 2 เนื่องจาก LDR1 ติดอยู่กับเส้นบวก สิ่งนี้ทำให้ผลผลิตสูงขึ้น
ในทำนองเดียวกันพิน 6 ของ A2 จะอยู่ต่ำกว่าพิน 5 เนื่องจากการเชื่อมต่อ LDR2 กับสายกราวด์และทำให้เอาต์พุตของ A2 อยู่ในระดับสูง
กล่าวอีกนัยหนึ่งคือเมื่อ LDR มีแสงสว่างสม่ำเสมออินพุตที่ไม่กลับด้าน (+) ของออปแอมป์ทั้งสองจะถือไว้สูงกว่าอินพุทกลับด้าน (-) ทำให้เอาต์พุตสูงขึ้น
ด้วยเอาต์พุตทั้งสองสูงไดรเวอร์ทรานซิสเตอร์จะทำให้มอเตอร์ตามลำดับทำงานอย่างสม่ำเสมอซึ่งจะช่วยให้รถวิ่งบนเส้นตรงได้อย่างราบรื่น
ยานพาหนะติดตามเส้นอย่างไร
เมื่อพบเส้นสีขาวโค้ง LDR เส้นใดเส้นหนึ่งเบี่ยงเบนไปจากเส้นทำให้เกิดความแตกต่างของแสงที่จุด A ของวงจร ต่อมาทำให้เอาต์พุตของออปแอมป์ที่เกี่ยวข้องลดลงและมอเตอร์ที่เกี่ยวข้องหยุดชะงักชั่วขณะ
ในสถานการณ์เช่นนี้มอเตอร์อีกด้านที่ยังทำงานอยู่จะบังคับให้รถหันไปทางมุมโค้งงอของเส้นซึ่งจะดึง LDR ที่แรเงากลับมาในบริเวณที่ส่องสว่างของเส้นสีขาว เมื่อสิ่งนี้เกิดขึ้นมอเตอร์ทั้งสองจะกลับมาทำงานอีกครั้งทำให้รถวิ่งได้ตามปกติ
การสลับเปิด / ปิดอัตโนมัติข้างต้นบนมอเตอร์ด้านซ้าย / ขวาเพื่อตอบสนองต่อการเปลี่ยนแปลงของแสงจากเส้นสีขาวที่โค้งงอบังคับให้รถต้องปรับและหลบหลีกตามเส้นสีขาว
วิธีสร้างยานพาหนะ
ในโพสต์ก่อนหน้านี้เราได้เรียนรู้ว่าไฟล์ รถควบคุมระยะไกลที่เรียบง่าย สามารถสร้างได้โดยใช้มอเตอร์เพียงสองตัวที่ติดกับขอบด้านหลังของกระดานสี่เหลี่ยมและล้อดัมมี่ที่ขอบด้านหน้าของบอร์ด

สำหรับวงจรยานพาหนะผู้ติดตามสายที่เสนอเราใช้โครงสร้างที่คล้ายกันสำหรับรถดังที่แสดงในรูปด้านบน
การจัดเรียงดูค่อนข้างเรียบง่ายล้อหลังติดตั้งด้วยมอเตอร์ซึ่งควบคุมโดยไดรเวอร์ทรานซิสเตอร์ผ่านเอาต์พุตแอมป์ของ op
เมื่อรถเบี่ยงออกจากเส้นความแตกต่างของระดับแสงบน LDRs จะปิดหนึ่งในออปแอมป์หยุดมอเตอร์ที่เกี่ยวข้อง
สิ่งนี้บังคับให้มอเตอร์ฝั่งตรงข้ามซึ่งทำงานอยู่หันไปทางด้านข้างของมอเตอร์ที่หยุดทำงานซึ่งหมายความว่าหากมอเตอร์ด้านซ้ายถูกเบรกรถจะถูกบังคับให้เลี้ยวไปทางซ้ายโดยปรับไปตามแนวโค้งในทิศทางเดียวกัน
นอกจากนี้ยังชี้ให้เห็นว่าการรวมมอเตอร์ซ้าย / ขวาเข้ากับเอาต์พุตออปแอมป์ควรทำอย่างเหมาะสมเพื่อให้ทิศทางการโค้งงอของสายและมอเตอร์ที่หยุดอยู่นั้นอยู่ด้านเดียวกันของรถ
วิธีการวางตำแหน่ง LDR
เนื่องจาก LDR ทั้งสอง (LDR1 และ LDR2) ควรจะรับรู้ถึงแสงสะท้อนจากเส้นสีขาวอย่างสม่ำเสมอการวางแนวควรตั้งฉากกับความยาวของเส้นดังที่แสดงด้านล่าง

ที่นี่เราได้สันนิษฐานว่ารถจะวิ่งจากขวาไปซ้ายตามเส้นที่วางไว้ในเส้นทางเดียวกัน
ความกว้างทั้งหมดของ LDR ควรอยู่ภายในความกว้างของเส้น
ควรติดตั้ง LDR และ LED ที่พื้นผิวด้านล่างของรถและควรอยู่ที่ด้านหลังใต้ชุดล้อหลัง
LED ที่ระบุคือ LED สีขาวพร้อมตัวต้านทานแบบอนุกรม 1K ต้องอยู่ในตำแหน่งใกล้กับ LDR และอยู่ตรงกลางเพื่อให้แน่ใจว่าแสงจาก LDR ไม่ไปถึง LDR โดยตรง แต่แสงควรไปถึง LDR โดยการสะท้อนจากเส้นสีขาวที่อยู่ข้างใต้
รายละเอียดมอเตอร์
มอเตอร์อาจเป็นแม่เหล็กถาวรแบบแปรงก็ได้ แต่ควรติดตั้งกล่องเกียร์เพื่อให้แน่ใจว่าการเคลื่อนที่ของรถช้าและมั่นคงอย่างเหมาะสม
ระดับกำลังของมอเตอร์ควรเป็นไปตามน้ำหนักบรรทุกที่รถควรจะบรรทุก สิ่งนี้สามารถทดสอบได้โดยการทดลองปฏิบัติบางอย่าง
วิธีการตั้งค่า
ในการตั้งค่าวงจรรถติดตามสายนี้คุณจะต้องจัดแถบสีขาวเส้นเล็ก ๆ ที่ทาสีบนพื้นผิวเรียบหรือเทปสีขาวติดอยู่บนพื้นผิวเรียบ
วางระบบ (ไม่มีล้อ) ไว้เหนือเส้นตามที่ระบุไว้ในแผนภาพก่อนหน้าเพื่อให้ LDR และ LED ได้รับการปรับอย่างถูกต้องภายในความกว้างของเส้น
เปิดสวิตช์ไฟ LED สีขาวควรส่องสว่างบริเวณข้างใต้ให้สว่าง ปรับค่าที่ตั้งไว้ล่วงหน้าสองค่าจนกว่ามอเตอร์ทั้งสองจะเปิดพร้อมกัน
ตอนนี้เลื่อนหน่วยไปทางขวาเล็กน้อยเพื่อให้ LDR1 เคลื่อนออกจากเส้นสีขาว
มอเตอร์ด้านซ้ายควรหยุด หากไม่เป็นเช่นนั้นให้ปรับ P1 จนกระทั่งมอเตอร์ด้านซ้ายหยุดลง
จากนั้นเลื่อนหน่วยไปทางซ้ายเล็กน้อยเพื่อให้ LDR2 เคลื่อนออกจากเส้นสีขาว สิ่งนี้ควรจะหยุดมอเตอร์ด้านขวา หากไม่ได้ปรับค่าที่ตั้งไว้ล่วงหน้า 10k จนกระทั่งมอเตอร์ด้านขวาหยุดลง
ขั้นตอนนี้จะเสร็จสิ้นขั้นตอนการตั้งค่าและตอนนี้คุณสามารถติดตั้งล้อบนมอเตอร์และใช้ยานพาหนะนำทางนี้เพื่อติดตามรางที่วางไว้บนพื้นโดยอัตโนมัติ
สายขาวกับสายดำ
ระบบยานพาหนะผู้ติดตามสายที่นำเสนอจะขึ้นอยู่กับเส้นสีขาวที่ฝังอยู่ที่พื้นแทนที่จะเป็นเส้นสีดำ ข้อดีของการใช้เส้นสีขาวแทนเส้นสีดำมีดังนี้
เส้นสีขาวดูหรูหราและเหมาะสมกว่าเมื่อเทียบกับเส้นสีดำ
ผู้ติดตามสายตามเส้นสีขาวสามารถทำงานได้แม้ในความมืดสนิทหรือแสงโดยรอบที่มืดสลัวการออกแบบที่ใช้แสงสีดำโดยปกติจะต้องมีไฟส่องสว่างภายนอกเพื่อให้รถสามารถทำงานได้
AGV ที่ใช้เส้นสีขาวทำงานได้แม่นยำกว่าโดยไม่คำนึงถึงสีกระเบื้องยกเว้นกระเบื้องที่มีสีขาวมากหรือเทียบเท่ากับสีของเส้นสีขาว
การแปลงรถเป็นผู้ติดตามสายดำ
แม้จะมีข้อดีข้างต้นหากผู้ใช้ต้องการให้รถวิ่งตามเส้นสีดำระบบก็สามารถเปลี่ยนได้อย่างง่ายดายโดยการปรับเปลี่ยนอย่างรวดเร็วเพียงไม่กี่อย่างในการออกแบบที่เสนอ
ผู้ใช้เพียงแค่เปลี่ยนหรือสลับการเชื่อมต่อพินอินพุตของออปแอมป์กับค่าที่ตั้งไว้ล่วงหน้าและลบ LED ที่เกี่ยวข้องกับ LDR
คู่ของ: วงจร UPS Sine Wave 50 วัตต์ ถัดไป: อธิบายวงจรอิเล็กทรอนิกส์เบื้องต้น - คู่มือสำหรับผู้เริ่มต้นใช้งานอิเล็กทรอนิกส์