หากเราจำชิ้นส่วนคอมพิวเตอร์เก่าเช่นเครื่องพิมพ์เมาส์แป้นพิมพ์จะเกี่ยวข้องกับความช่วยเหลือของตัวเชื่อมต่อ กระบวนการสื่อสารระหว่างคอมพิวเตอร์และชิ้นส่วนเหล่านี้สามารถทำได้โดยใช้ UART Universal Serial Bus (USB) ได้เปลี่ยนแปลงหลักการสื่อสารทุกชนิดบนคอมพิวเตอร์ แต่ UART ยังคงใช้ในแอปพลิเคชันที่ระบุไว้ข้างต้น โดยประมาณทั้งหมด ประเภทของไมโครคอนโทรลเลอร์ สถาปัตยกรรมมีฮาร์ดแวร์ UART ในตัวเนื่องจากการสื่อสารแบบอนุกรมและใช้สายเคเบิลเพียงสองเส้นในการสื่อสาร บทความนี้กล่าวถึงสิ่งที่ UART UART ทำงานอย่างไร ความแตกต่างระหว่างการสื่อสารแบบอนุกรมและแบบขนาน แผนภาพบล็อก UART , การสื่อสาร UART, การเชื่อมต่อ UART, การใช้งาน, ข้อดีและข้อเสีย
UART คืออะไร?
UART แบบเต็ม คือ“ Universal Asynchronous Receiver / Transmitter” และเป็น IC ที่ติดตั้งภายในไมโครคอนโทรลเลอร์ แต่ไม่เหมือนกับโปรโตคอลการสื่อสาร (I2C & SPI) หน้าที่หลักของ UART คือการสื่อสารข้อมูลแบบอนุกรม ใน UART การสื่อสารระหว่างอุปกรณ์สองเครื่องสามารถทำได้สองวิธีคือการสื่อสารข้อมูลแบบอนุกรมและการสื่อสารข้อมูลแบบขนาน

UART
การสื่อสารแบบอนุกรมและแบบขนาน
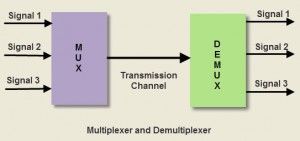
ในการสื่อสารข้อมูลแบบอนุกรมข้อมูลสามารถถ่ายโอนผ่านสายเคเบิลหรือสายเดียวในรูปแบบบิตต่อบิตและต้องใช้สายเคเบิลเพียงสองสาย การสื่อสารข้อมูลแบบอนุกรมไม่แพงเมื่อเทียบกับการสื่อสารแบบขนาน ต้องใช้วงจรและสายไฟน้อยมาก ดังนั้นการสื่อสารนี้มีประโยชน์มากในวงจรผสมเมื่อเทียบกับการสื่อสารแบบขนาน
ในการสื่อสารข้อมูลแบบขนานข้อมูลสามารถถ่ายโอนผ่านสายเคเบิลหลายสายพร้อมกัน การสื่อสารข้อมูลแบบขนานมีราคาแพงและรวดเร็วมากเนื่องจากต้องใช้ฮาร์ดแวร์และสายเคเบิลเพิ่มเติม ตัวอย่างที่ดีที่สุดสำหรับการสื่อสารนี้ ได้แก่ เครื่องพิมพ์เก่า, PCI, RAM เป็นต้น

การสื่อสารแบบขนาน
UART Block Diagram
แผนภาพบล็อก UART ประกอบด้วยสององค์ประกอบคือตัวส่งและตัวรับที่แสดงด้านล่าง ส่วนเครื่องส่งสัญญาณประกอบด้วยสามช่วงตึก ได้แก่ การส่งการระงับการบันทึกการลงทะเบียนกะและการควบคุมตรรกะ ในทำนองเดียวกันส่วนผู้รับรวมถึงการลงทะเบียนรับการระงับการลงทะเบียนกะและตรรกะการควบคุม โดยทั่วไปสองส่วนนี้มีให้โดยเครื่องกำเนิดอัตราบอด เครื่องกำเนิดไฟฟ้านี้ใช้สำหรับสร้างความเร็วเมื่อส่วนเครื่องส่ง & ส่วนเครื่องรับต้องส่งหรือรับข้อมูล
การลงทะเบียนการระงับในเครื่องส่งประกอบด้วยข้อมูลไบต์ที่จะส่ง กะลงทะเบียนในเครื่องส่งและตัวรับย้ายบิตไปทางขวาหรือซ้ายจนกว่าข้อมูลจะถูกส่งหรือรับหนึ่งไบต์ ตรรกะควบคุมการอ่าน (หรือ) เขียนใช้สำหรับบอกเวลาที่จะอ่านหรือเขียน
เครื่องกำเนิดอัตราบอดระหว่างเครื่องส่งและเครื่องรับจะสร้างความเร็วตั้งแต่ 110 bps ถึง 230400 bps โดยทั่วไปอัตราบอดของไมโครคอนโทรลเลอร์คือ 9600 ถึง 115200

UART Block Diagram
การสื่อสาร UART
ในการสื่อสารนี้มี UART อยู่สองประเภทคือการส่ง UART และการรับ UART และการสื่อสารระหว่างสองสิ่งนี้สามารถทำได้โดยตรงซึ่งกันและกัน สำหรับสิ่งนี้จำเป็นต้องใช้สายเคเบิลเพียงสองเส้นในการสื่อสารระหว่าง UART สองตัว การไหลของข้อมูลจะมาจากทั้งพินส่ง (Tx) และรับ (Rx) ของ UART ใน UART การส่งข้อมูลจาก Tx UART ไปยัง Rx UART สามารถทำได้แบบอะซิงโครนัส (ไม่มีสัญญาณ CLK สำหรับซิงโครไนซ์บิต o / p)
การส่งข้อมูลของ UART สามารถทำได้โดยใช้บัสข้อมูลในรูปแบบขนานกับอุปกรณ์อื่น ๆ เช่นไมโครคอนโทรลเลอร์หน่วยความจำซีพียู ฯลฯ หลังจากได้รับข้อมูลแบบขนานจากบัสแล้วจะสร้างแพ็กเก็ตข้อมูลโดยการเพิ่มสามบิต เช่น start, stop และ parity มันอ่านแพ็คเก็ตข้อมูลทีละบิตและแปลงข้อมูลที่ได้รับเป็นรูปแบบขนานเพื่อกำจัดสามบิตของแพ็กเก็ตข้อมูล สรุปได้ว่าแพ็กเก็ตข้อมูลที่ได้รับจาก UART จะถ่ายโอนแบบขนานไปยังบัสข้อมูลที่ปลายทางการรับ

การสื่อสาร UART
เริ่มบิต
บิตเริ่มต้นเรียกอีกอย่างว่าบิตซิงโครไนซ์ที่วางไว้ก่อนข้อมูลจริง โดยทั่วไปสายส่งข้อมูลที่ไม่ได้ใช้งานจะถูกควบคุมที่ระดับแรงดันไฟฟ้าสูง ในการเริ่มต้นการส่งข้อมูลการส่ง UART จะลากสายข้อมูลจากระดับแรงดันไฟฟ้าสูง (1) ไปยังระดับแรงดันไฟฟ้าต่ำ (0) การได้รับ UART จะสังเกตเห็นการเปลี่ยนแปลงนี้จากระดับสูงไปสู่ระดับต่ำบนสายข้อมูลและเริ่มทำความเข้าใจกับข้อมูลจริง โดยทั่วไปมีเพียงบิตเริ่มต้นเดียว
หยุดบิต
Stop Bit ถูกวางไว้ที่ส่วนท้ายของแพ็กเก็ตข้อมูล โดยปกติบิตนี้มีความยาว 2 บิต แต่มักจะใช้บิตเท่านั้น ในการหยุดการออกอากาศไฟล์ UART เก็บสายข้อมูลด้วยไฟฟ้าแรงสูง
Parity Bit
พาริตีบิตช่วยให้ผู้รับสามารถตรวจสอบได้ว่าข้อมูลที่รวบรวมนั้นถูกต้องหรือไม่ เป็นระบบตรวจสอบข้อผิดพลาดระดับต่ำ & parity bit มีให้เลือกสองช่วงเช่น Even Parity และ Odd Parity อันที่จริงบิตนี้ไม่ได้ใช้กันอย่างแพร่หลายดังนั้นจึงไม่ได้บังคับ
Data Bits หรือ Data Frame
บิตข้อมูลประกอบด้วยข้อมูลจริงที่ถ่ายทอดจากผู้ส่งไปยังผู้รับ ความยาวของเฟรมข้อมูลอาจอยู่ระหว่าง 5 และ 8 หากไม่ได้ใช้พาริตีบิตเมื่อความยาวของเฟรมข้อมูลอาจยาวได้ 9 บิต โดยทั่วไป LSB ของข้อมูลที่จะส่งก่อนจึงมีประโยชน์มากสำหรับการส่ง
การเชื่อมต่อ UART
รูปต่อไปนี้แสดงการเชื่อมต่อ UART กับ ไมโครคอนโทรลเลอร์ . การสื่อสาร UART สามารถทำได้โดยใช้สัญญาณสามแบบเช่น TXD, RXD และ GND
ด้วยการใช้สิ่งนี้เราสามารถแสดงข้อความในคอมพิวเตอร์ส่วนบุคคลจากบอร์ดไมโครคอนโทรลเลอร์ 8051 รวมถึงโมดูล UART ในบอร์ด 8051 มีอินเทอร์เฟซแบบอนุกรมสองแบบเช่น UART0 และ UART1 ที่นี่ใช้การเชื่อมต่อ UART0 Tx pin ส่งข้อมูลไปยัง PC & Rx pin รับข้อมูลจาก PC อัตรารับส่งข้อมูลสามารถใช้เพื่อแสดงความเร็วของทั้งไมโครคอนโทรลเลอร์และพีซี การรับส่งข้อมูลสามารถทำได้อย่างเหมาะสมเมื่ออัตราการส่งข้อมูลของไมโครคอนโทรลเลอร์และพีซีใกล้เคียงกัน

การเชื่อมต่อ UART
การใช้งาน UART
โดยปกติแล้ว UART จะใช้ในไมโครคอนโทรลเลอร์สำหรับความต้องการที่แน่นอนและยังมีอยู่ในอุปกรณ์สื่อสารต่างๆเช่น การสื่อสารไร้สาย , หน่วย GPS, โมดูลบลูทู ธ และแอปพลิเคชันอื่น ๆ อีกมากมาย
มาตรฐานการสื่อสารเช่น RS422 & TIA ใช้ใน UART ยกเว้น RS232 โดยปกติ UART เป็น IC แยกที่ใช้ใน การสื่อสารแบบอนุกรม UART
“วิธีทำแดมิน ”
ข้อดีและข้อเสียของ UART
ข้อดีข้อเสียของ UART มีดังต่อไปนี้
- ต้องใช้เพียงสองสายสำหรับการสื่อสารข้อมูล
- ไม่จำเป็นต้องใช้สัญญาณ CLK
- ประกอบด้วยบิตพาริตีสำหรับอนุญาตให้ตรวจสอบข้อผิดพลาด
- การจัดเรียงแพ็คเก็ตข้อมูลสามารถแก้ไขได้เนื่องจากพื้นผิวทั้งสองถูกจัดเรียงไว้
- ขนาดเฟรมข้อมูลสูงสุด 9 บิต
- ไม่มีระบบทาส (หรือ) หลักหลายระบบ
- อัตราการรับส่งข้อมูล UART ทุกครั้งควรอยู่ที่ 10% ของกันและกัน
ดังนั้นทั้งหมดนี้เป็นข้อมูลเกี่ยวกับภาพรวมของ Universal Asynchronous Receiver Transmitter (UART) เป็นหนึ่งในอินเทอร์เฟซพื้นฐานที่ให้การสื่อสารที่เรียบง่ายคุ้มค่าและสอดคล้องกันระหว่างไมโครคอนโทรลเลอร์และพีซี นี่คือคำถามสำหรับคุณว่าคืออะไร หมุด UART เหรอ?