
ปัจจุบันหุ่นยนต์กลายเป็นหนึ่งในความก้าวหน้าที่สุดในด้านเทคโนโลยี การประยุกต์ใช้หุ่นยนต์ ส่วนใหญ่เกี่ยวข้องกับรถยนต์การแพทย์การก่อสร้างการป้องกันและยังใช้เป็นก หุ่นยนต์ดับเพลิง เพื่อช่วยเหลือประชาชนจากเหตุเพลิงไหม้ แต่การควบคุมหุ่นยนต์ด้วยรีโมทหรือสวิตช์นั้นค่อนข้างซับซ้อน ดังนั้นจึงมีการพัฒนาโครงการใหม่นั่นคือหุ่นยนต์ควบคุมท่าทางที่ใช้มาตรความเร่ง เป้าหมายหลักของโครงการนี้คือการควบคุมการเคลื่อนไหวของหุ่นยนต์ด้วยท่าทางมือโดยใช้มาตรความเร่ง

หุ่นยนต์ควบคุมท่าทางที่ใช้ Accelerometer
หุ่นยนต์ควบคุมท่าทางที่ใช้ Accelerometer
โครงการนี้ประกอบด้วยส่วนเครื่องส่งและส่วนเครื่องรับ ส่วนประกอบที่จำเป็น ในการสร้างโครงการนี้ ได้แก่ Ht12e, Ht12d, L293D, AT89S52, 7805, ตัวเก็บประจุ, คริสตัล, ขั้วต่อ PBT, เสาอากาศขั้วเดียว, ตัวต้านทาน, LED, มาตรความเร่งและแบตเตอรี่เครื่องวัดความเร่งเป็นอุปกรณ์ที่จำเป็นในโครงการนี้
accelerometer หรืออุปกรณ์ส่งสัญญาณขึ้นอยู่กับท่าทางของมือ ผ่านอุปกรณ์เครื่องส่งคำสั่งจะได้รับและประมวลผลด้วยความช่วยเหลือของไมโครคอนโทรลเลอร์ At89S51 นี้ ไมโครคอนโทรลเลอร์ให้ ส่งสัญญาณให้หุ่นยนต์เคลื่อนที่ไปในทิศทางที่ต้องการ หลักการทำงานพื้นฐานของหุ่นยนต์ชุดนี้ของสัญญาณข้อมูลของการส่งสัญญาณการอ่านอุปกรณ์ไปยังไมโครคอนโทรลเลอร์ที่ติดตั้งในหุ่นยนต์ ไมโครคอนโทรลเลอร์ที่ตั้งโปรแกรมไว้ล่วงหน้าจะทำงานตามโปรแกรมซึ่งทำให้หุ่นยนต์ทำงานได้ตามนั้น
หุ่นยนต์ที่ควบคุมด้วยท่าทางโดยใช้เครื่องวัดความเร่งเป็นหุ่นยนต์ชนิดหนึ่งที่สามารถสั่งการได้ด้วยการเคลื่อนไหวของมือโดยวางเครื่องวัดความเร่ง โครงการนี้แบ่งออกเป็นสองส่วนอุปกรณ์เครื่องส่งและอุปกรณ์รับ ในกรณีที่อุปกรณ์ท่าทางทำงานเป็นอุปกรณ์ส่งสัญญาณและหุ่นยนต์ทำงานเป็นอุปกรณ์รับสัญญาณเมื่อวางอุปกรณ์ส่งสัญญาณ (accelerometer) ไว้ในมืออุปกรณ์จะส่งสัญญาณไปยังหุ่นยนต์เพื่อดำเนินการที่ต้องการ
ส่วนประกอบหลักที่ใช้ในส่วนการส่งสัญญาณ ได้แก่ accelerometer, comparator, HT12E IC encoder และ เครื่องส่ง RF .
Accelerometer
accelerometer คือหนึ่ง ประเภทของเซ็นเซอร์ และให้ข้อมูลอนาล็อกขณะเคลื่อนที่ไปในทิศทาง X, Y และ Z ทิศทางเหล่านี้ขึ้นอยู่กับประเภทของเซ็นเซอร์ แผนภาพของ accelerometer แสดงไว้ด้านล่าง เซ็นเซอร์นี้ประกอบด้วยทิศทางของลูกศรหากเราเอียงเซ็นเซอร์ไปในทิศทางเดียวข้อมูลที่หมุดเฉพาะจะเปลี่ยนไปในรูปแบบอนาล็อก accelerometer ประกอบด้วยหมุดหกตัวโดยที่ ฟังก์ชั่นของแต่ละพิน จะกล่าวถึงด้านล่าง

Accelerometer
- Pin-1: พิน VDD ใช้เพื่อจ่าย + 5V ให้กับพินนี้
- Pin-2: พิน GND เชื่อมต่อกับกราวด์เพื่อจุดประสงค์ในการให้น้ำหนัก
- Pin-3: X พินจะรับข้อมูลในทิศทาง X
- Pin-4: ขา Y จะรับข้อมูลในทิศทาง Y
- Pin-5: ขา Z จะรับข้อมูลในทิศทาง Z
- Pin-6: ขา ST ใช้เพื่อปรับความไวของ accelerometer 1.5g หรือ 2g หรือ 3g หรือ 4g
เครื่องเปรียบเทียบ
ตัวเปรียบเทียบใช้เพื่อเปลี่ยนแรงดันไฟฟ้าอะนาล็อกเป็นแรงดันไฟฟ้าดิจิตอลและเปรียบเทียบแรงดันอนาล็อกกับแรงดันอ้างอิงและให้แรงดันไฟฟ้าต่ำหรือแรงดันไฟฟ้าสูงที่แม่นยำ
ตัวเข้ารหัส
ตัวเข้ารหัสนี้ใช้เพื่อเข้ารหัสข้อมูล 4 บิตและส่งโดยใช้โมดูลตัวส่งสัญญาณ RF
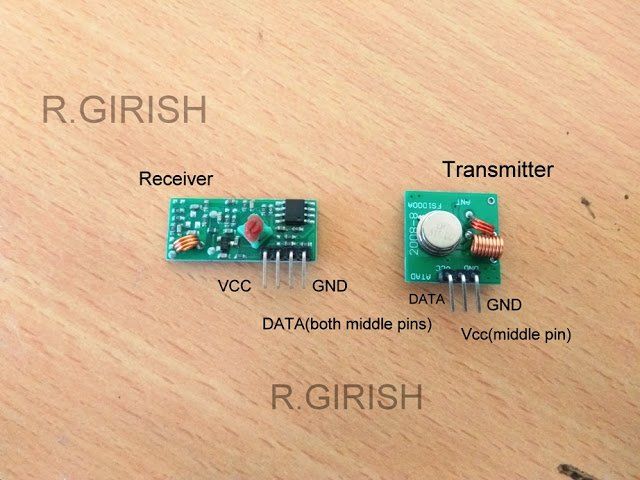
โมดูลเครื่องส่งสัญญาณ RF
โมดูล RF TX ทำงานด้วยความถี่ 433MHz และโมดูลนี้หาได้ง่ายในตลาดด้วยต้นทุนต่ำ
ส่วนประกอบหลักที่ใช้ในส่วนรับ ได้แก่ ตัวรับตัวถอดรหัสไมโครคอนโทรลเลอร์และตัวขับมอเตอร์

มาตราเครื่องส่ง
ตัวรับ RF
เครื่องรับ RF ของโครงการนี้จะรับข้อมูลที่ถ่ายโอนโดยอุปกรณ์ส่งสัญญาณ
ตัวถอดรหัส
ตัวถอดรหัสใช้เพื่อเปลี่ยนข้อมูลอนุกรมเป็นข้อมูลแบบขนานซึ่งได้รับจากโมดูลตัวรับ RF
ไมโครคอนโทรลเลอร์
ไมโครคอนโทรลเลอร์เป็นส่วนสำคัญที่สุด ของหุ่นยนต์ ไมโครคอนโทรลเลอร์ตระกูล 8051 ถูกใช้ในวงจรเพื่อให้สามารถตัดสินใจได้
ไดรเวอร์มอเตอร์
ไดรเวอร์มอเตอร์เป็นอุปกรณ์ที่ให้การเคลื่อนไหวในการทำงานเช่นเดียวกับมอเตอร์ ดังนั้นเราจึงต้องใช้ไดรเวอร์มอเตอร์เพื่อเรียกใช้ผ่านคอนโทรลเลอร์ การเชื่อมต่อระหว่างมอเตอร์และไมโครคอนโทรลเลอร์สามารถทำได้โดยใช้ IC ไดรเวอร์มอเตอร์ L293D ในวงจรนี้
ที่ส่วนเครื่องรับโมดูลตัวรับ RF จะรับข้อมูลจากเครื่องส่ง ข้อมูลที่ได้รับสามารถถอดรหัสโดย IC HT12D ข้อมูลที่ได้รับสามารถประมวลผลโดยไมโครคอนโทรลเลอร์ AT89S51 และใช้ไดรเวอร์มอเตอร์เพื่อควบคุมมอเตอร์

ส่วนผู้รับ
หุ่นยนต์ควบคุมท่าทางทำงาน
หุ่นยนต์ควบคุมด้วยท่าทางที่ใช้ Accelerometer จะเคลื่อนไหวตามการเคลื่อนไหวของมือในขณะที่เราวางเครื่องวัดความเร่งไว้บนมือของคุณ เมื่อเราเอียงมือด้วยเครื่องวัดความเร่งที่ด้านหน้าของหุ่นยนต์หุ่นยนต์จะเริ่มเคลื่อนที่ไปข้างหน้าจนกว่าจะได้รับการเคลื่อนไหวครั้งต่อไป เมื่อเราเอียงมือไปในทิศทางถอยหลังหุ่นยนต์จะเปลี่ยนทิศทางและสถานะ จากนั้นจะเริ่มเคลื่อนที่ไปในทิศทางถอยหลังจนกว่าจะได้รับสัญญาณถัดไป เมื่อเราเอียงมือไปทางด้านซ้ายหุ่นยนต์จะเคลื่อนที่ไปทางด้านซ้ายจนกว่าจะได้รับสัญญาณถัดไปในทำนองเดียวกันเมื่อเราเอียงมือไปทางด้านขวาหุ่นยนต์จะเคลื่อนที่ไปทางขวา
การใช้งาน
แอพพลิเคชั่นของ accelerometer หุ่นยนต์ควบคุมท่าทางที่ใช้ ได้แก่
- หุ่นยนต์เหล่านี้ใช้ในงานทางทหารเพื่อใช้งานหุ่นยนต์
- หุ่นยนต์เหล่านี้ใช้ในงานทางการแพทย์เพื่อวัตถุประสงค์ในการผ่าตัด
- หุ่นยนต์เหล่านี้ถูกใช้ในสาขาการก่อสร้าง
- หุ่นยนต์เหล่านี้ใช้ในอุตสาหกรรมเพื่อควบคุมรถเข็นและยก
ดังนั้นทั้งหมดนี้จึงเกี่ยวกับหุ่นยนต์ควบคุมท่าทางที่ใช้ Accelerometer การทำงานและการใช้งานเราหวังว่าคุณจะเข้าใจแนวคิดนี้ดีขึ้น นอกจากนี้ข้อสงสัยใด ๆ เกี่ยวกับแนวคิดนี้หรือ โครงการอิเล็กทรอนิกส์ โปรดแสดงความคิดเห็นของคุณโดยการแสดงความคิดเห็นในส่วนความคิดเห็นด้านล่าง นี่คือคำถามสำหรับคุณอะไรคือแอปพลิเคชั่นของหุ่นยนต์ควบคุมท่าทางที่ใช้มาตรความเร่ง
เครดิตภาพ:
- หุ่นยนต์ควบคุมท่าทางที่ใช้ Accelerometer ytimg
- Accelerometer static.flickr









![วงจรตัวบ่งชี้ความดันบรรยากาศ [วงจร LED บารอมิเตอร์]](https://electronics.jf-parede.pt/img/3-phase-power/40/atmospheric-pressure-indicator-circuit-led-barometer-circuit-1.jpg)
{kind=link}
{kind=link}