ในโพสต์นี้เราได้เรียนรู้วิธีสร้างรถเข็นไฟฟ้าอย่างง่ายโดยใช้วงจรขับมอเตอร์ BLDC มาตรฐานและมอเตอร์ BLDC กำลังสูงสองตัว
บทนำ
การเปิดตัววีลแชร์ไฟฟ้าเป็นเหมือนประโยชน์สำหรับเพื่อน ๆ ที่มีความสามารถแตกต่างกันของเราซึ่งตอนนี้การเคลื่อนย้ายและเดินทางไปไหนมาไหนง่ายขึ้นมากเพียงแค่กดปุ่ม
ส่วนที่มีราคาแพงและซับซ้อนเพียงอย่างเดียวในการออกแบบเก้าอี้ล้อเลื่อนคือการคำนวณตามหลักสรีรศาสตร์และประสิทธิภาพของกลไกล้อในขณะที่อุปกรณ์อิเล็กทรอนิกส์สำหรับควบคุมระบบดูเหมือนจะมีค่าใช้จ่ายน้อยกว่าและซับซ้อนกว่า
หากผู้ผลิตสามารถเข้าถึงการออกแบบตามหลักสรีรศาสตร์ของเก้าอี้ล้อเลื่อนที่มีประสิทธิภาพสูงสุดการทำให้ส่วนไฟฟ้า / อิเล็กทรอนิกส์ของระบบสามารถดำเนินการได้อย่างรวดเร็วโดยดำเนินการตามขั้นตอนที่อธิบายไว้ในคำอธิบายต่อไปนี้
ข้อมูลจำเพาะ
ในการสร้างเก้าอี้ล้อเลื่อนไฟฟ้าส่วนประกอบหลักที่จำเป็นสำหรับสิ่งนี้อาจเป็นไปตามรายการต่อไปนี้:
1) มอเตอร์ BLDC - 2nos (250 วัตต์ต่อตัว)

2) การประกอบตัวรถเข็น
3) วงจรขับ BLDC
4) Deep Cycle Battery หรือควรเป็น Li-ion - 2nos แต่ละ 24V 60AH

ยกเว้นส่วนที่เหลือของวงจรขับ BLDC ของวัสดุที่สามารถจัดหาได้จากตลาดสำเร็จรูป
แม้ว่าฉันจะนำเสนอวงจรไดรเวอร์ BLDC มากมายในเว็บไซต์นี้ แต่ฉันจะเลือกวงจรที่ดูมีแนวโน้มและมีประสิทธิภาพมากกว่าเนื่องจากคุณสมบัติที่ยืดหยุ่นในแง่ของรายละเอียดมอเตอร์และความสามารถในการจัดการพลังงาน
ในโพสต์ที่แล้วฉันได้พูดถึงเรื่องที่ค่อนข้างเรียบง่าย วงจรขับ BLDC สากลโดยใช้ IC ML4425 และจะใช้การออกแบบเดียวกันสำหรับวงจรขับมอเตอร์วีลแชร์ไฟฟ้าของเราในปัจจุบัน
เนื่องจากคุณสมบัติไร้เซ็นเซอร์วงจรจึงช่วยให้คุณสามารถรวมมอเตอร์ 3 เฟสประเภทใดก็ได้ไม่ว่าจะมีเซ็นเซอร์หรือไม่ก็ตามและไม่มีข้อ จำกัด ใด ๆ เกี่ยวกับขีด จำกัด กระแส (แอมป์) ที่จำเป็นสำหรับการขับเคลื่อนมอเตอร์
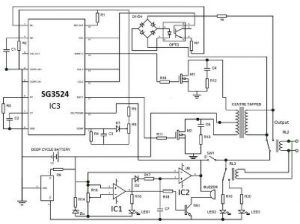
แผนผังที่สมบูรณ์สามารถเห็นได้ในภาพต่อไปนี้:
แผนภาพวงจร

ข้อกำหนดทางเทคนิคสำหรับไดรเวอร์ BLDC แบบไม่มีเซ็นเซอร์ข้างต้น ได้อธิบายไว้แล้วในโพสต์ก่อนหน้าของเราดังนั้นคุณสามารถอ้างอิงสิ่งเดียวกันนี้เพื่อเรียนรู้รายละเอียดเชิงลึก
จริงๆแล้วการควบคุมนั้นค่อนข้างง่ายและจะช่วยให้สามารถควบคุมและเคลื่อนย้ายได้อย่างง่ายดายสำหรับผู้ใช้ที่ใช้วีลแชร์
สวิตช์ RUN / BRAKE อาจเป็นสวิตช์ DPDT สำหรับงานหนักเพียงตัวเดียวซึ่งผู้ปฏิบัติงานสามารถใช้เพื่อหยุดรถเข็นได้ทันทีเมื่อจำเป็น
สามารถควบคุมความเร็วของวีลแชร์ได้โดยการเลื่อนปุ่ม R18 ตามเข็มนาฬิกา / ทวนเข็มนาฬิกา หม้อนี้ต้องมีคุณภาพดีมากควรเป็นแบบหลายเทิร์นดังที่แสดงด้านล่าง
ข้อมูลจำเพาะของโพเทนชิออมิเตอร์

แรงดันไฟฟ้ามีช่วงกว้างเริ่มตั้งแต่ 24V ถึง 80V ซึ่งหมายความว่าสามารถเชื่อมต่อแบตเตอรี่จำนวนมากขึ้นเป็นอนุกรมเพื่อใช้งานมอเตอร์ที่มีแรงดันไฟฟ้าสูงกว่าซึ่งจะช่วยให้ผู้ผลิตสามารถรวมมอเตอร์และแบตเตอรี่ขนาดเล็กลงเพื่อให้มั่นใจว่ารถเข็นมีขนาดกะทัดรัดและน้ำหนักเบา .
มอเตอร์ทั้งสองตัวที่มาพร้อมกับล้อหลังสามารถเชื่อมต่อแบบขนานและขับเคลื่อนโดยใช้วงจรขับ BLDC ที่แสดงด้านบน
หากคุณมีข้อสงสัยใด ๆ เกี่ยวกับวงจรรถเข็นไฟฟ้าที่อธิบายไว้ข้างต้นโดยใช้มอเตอร์ BLDC อย่าลังเลที่จะแสดงผ่านช่องค้นหาด้านล่าง
อัพเดท:
การออกแบบข้างต้นขาดคุณสมบัติการถอยหลังของมอเตอร์ที่สำคัญการออกแบบที่ได้รับการปรับปรุงพร้อมคุณสมบัติการย้อนกลับสามารถพบได้ในเอกสารข้อมูล pdf ต่อไปนี้:
https://www.elprocus.com/wp-content/uploads/2018/04/BLDC-driver.pdf
คลิปวิดีโอ:
คู่ของ: คอนโทรลเลอร์มอเตอร์ BLDC ไร้เซ็นเซอร์กระแสสูงโดยใช้ Back EMF ถัดไป: ไฟฉายข้อเหวี่ยงทำงานอย่างไร