โพสต์ให้รายละเอียดเกี่ยวกับวิธีการต่างๆในการกำหนดค่าวงจรแก้ไขตัวประกอบกำลังหรือวงจร PFC ในการออกแบบ SMPS และอธิบายตัวเลือกแนวทางปฏิบัติที่ดีที่สุดสำหรับโทโพโลยีเหล่านี้เพื่อให้สอดคล้องกับแนวทางการ จำกัด PFC ที่ทันสมัย
การออกแบบวงจรจ่ายไฟที่มีประสิทธิภาพไม่เคยง่ายอย่างนี้มาก่อนอย่างไรก็ตามในช่วงเวลาที่ผ่านมานักวิจัยสามารถแก้ไขปัญหาส่วนใหญ่ที่เกี่ยวข้องได้และในบรรทัดเดียวกันการออกแบบ SMPS ที่ทันสมัยยังได้รับการปรับให้เหมาะสมกับผลลัพธ์ที่ดีที่สุดด้วย มาตรฐานการกำกับดูแลที่เกิดขึ้นใหม่ซึ่งมีบทบาทสำคัญในการใช้พารามิเตอร์คุณภาพที่เข้มงวดขึ้นสำหรับหน่วยจ่ายไฟสมัยใหม่
แนวทาง PFC
ข้อ จำกัด ด้านคุณภาพของแหล่งจ่ายไฟที่ทันสมัยถูกวางไว้อย่างจริงจังโดยรวมโดยความพยายามของผู้ผลิตซัพพลายเออร์และหน่วยงานกำกับดูแลอื่น ๆ ที่เกี่ยวข้อง
ในบรรดาพารามิเตอร์คุณภาพจำนวนมากที่วางไว้สำหรับการออกแบบแหล่งจ่ายไฟสมัยใหม่การแก้ไขการแก้ไขตัวประกอบกำลัง (PFC) ซึ่งแท้จริงแล้วอยู่ในรูปแบบของการยกเลิกฮาร์มอนิกได้รับการประกาศให้เป็นข้อกำหนดบังคับตามกฎ IEC 61000-3-2
เนื่องจากนักออกแบบรายนี้ถูกบังคับให้เผชิญกับความท้าทายที่รุนแรงขึ้นในการออกแบบขั้นตอนการแก้ไขตัวประกอบกำลังในการออกแบบพาวเวอร์ซัพพลายเพื่อให้เป็นไปตามกฎหมายสมัยใหม่ที่เข้มงวดเหล่านี้และด้วยอุปกรณ์จ่ายไฟที่มีคุณสมบัติและช่วงการใช้งานที่น่ากลัวมากขึ้นเรื่อย ๆ การจัดโครงสร้างวงจร PFC ที่เหมาะสม ไม่ได้ง่ายขึ้นสำหรับผู้ผลิตหลายรายในเวทีนี้
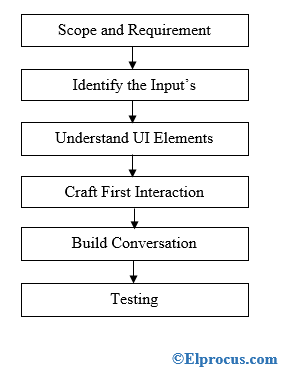
แบบฝึกหัดที่นำเสนอนี้จัดทำขึ้นโดยเฉพาะสำหรับสมาคมและผู้เชี่ยวชาญที่เกี่ยวข้องกับการผลิตหรือ การออกแบบ SMPS ของฟลายแบ็ค เพื่ออำนวยความสะดวกให้กับพวกเขาด้วยการออกแบบและการคำนวณ PFC ที่เหมาะสมที่สุดตามความต้องการของแต่ละบุคคล
การอภิปรายที่รวมอยู่ในแบบฝึกหัดเหล่านี้จะช่วยให้คุณออกแบบวงจร PFC ได้แม้กระทั่งสำหรับยูนิตขนาดใหญ่อย่างมีนัยสำคัญในช่วงไม่เกิน 400 วัตต์, 0.75 แอมป์
ผู้อ่านจะได้รับโอกาสในการเรียนรู้เกี่ยวกับการเลือกตัวแปลงแบบแยกขั้นตอนเดียวซึ่งรวมถึงไดรเวอร์ LED ด้วยการสอนการออกแบบทีละขั้นตอนและคำแนะนำพร้อมกับการเปรียบเทียบระดับระบบนักออกแบบจำนวนมากที่มีส่วนร่วมในสาขาอิเล็กทรอนิกส์กำลังจะได้รับการแจ้งให้ทราบ ใช้แนวทางที่เหมาะสมที่สุดสำหรับความต้องการใช้งานเฉพาะของตน
วัตถุประสงค์การแก้ไขตัวประกอบกำลัง
การเพิ่มประสิทธิภาพวงจรแก้ไขตัวประกอบกำลังภายในหน่วย SMPS (แหล่งจ่ายไฟโหมดสวิตช์) ที่ทันสมัยสามารถพัฒนาได้ในอดีตที่ผ่านมาเนื่องจากการถือกำเนิดของวงจรรวมขั้นสูงที่เกี่ยวข้อง (ICs) ซึ่งทำให้สามารถวางการออกแบบ PFC ที่แตกต่างกันได้โดยเฉพาะ โหมดการทำงานและความสามารถในการจัดการความท้าทายของแต่ละบุคคล
ด้วยการเพิ่มขึ้นของโครงสร้าง SMPS ที่เพิ่มขึ้นความซับซ้อนในการออกแบบและการใช้งาน PFC ก็ทวีความรุนแรงขึ้นในยุคปัจจุบัน
ในบทช่วยสอนแรกเราจะเรียนรู้เกี่ยวกับรายละเอียดการดำเนินงานของการออกแบบซึ่งส่วนใหญ่เป็นที่ต้องการของผู้เชี่ยวชาญด้านการแก้ไข
โดยทั่วไปการแก้ไขตัวประกอบกำลังจะช่วยปรับกระแสอินพุตภายในอุปกรณ์จ่ายไฟแบบออฟไลน์ให้เหมาะสมเพื่อให้สิ่งเหล่านี้สามารถเพิ่มกำลังไฟฟ้าจริงจากอินพุตหลักที่มีอยู่
ตามข้อกำหนดปกติเครื่องใช้ไฟฟ้าที่กำหนดจะต้องเลียนแบบตัวเองว่าเป็นโหลดที่มีความต้านทานบริสุทธิ์เพื่อให้สามารถใช้พลังงานปฏิกิริยาเป็นศูนย์ได้
เงื่อนไขนี้ส่งผลให้เกิดกระแสฮาร์มอนิกอินพุตเกือบเป็นศูนย์กล่าวอีกนัยหนึ่งก็คือช่วยให้กระแสไฟฟ้าที่บริโภคอยู่ในแนวเดียวกันอย่างสมบูรณ์แบบด้วยแรงดันไฟฟ้าอินพุตซึ่งโดยปกติจะอยู่ในรูปของคลื่นไซน์
ความสำเร็จนี้ช่วยอำนวยความสะดวกให้เครื่องใช้ 'พลังงานจริง' จากแหล่งจ่ายไฟในระดับที่เหมาะสมและมีประสิทธิภาพสูงสุดซึ่งจะส่งผลให้ลดการสิ้นเปลืองพลังงานไฟฟ้าและเพิ่มประสิทธิภาพให้น้อยที่สุด
การใช้ไฟฟ้าอย่างมีประสิทธิภาพนี้ไม่เพียง แต่ช่วยให้เครื่องใช้ไฟฟ้าสามารถนำเสนอตัวเองได้อย่างมีประสิทธิภาพสูงสุด แต่ยังรวมถึง บริษัท สาธารณูปโภคและอุปกรณ์ทุนที่เกี่ยวข้องสำหรับกระบวนการนี้ด้วย
คุณสมบัติข้างต้นยังช่วยให้สายไฟปราศจากฮาร์มอนิกส์และสัญญาณรบกวนที่เกิดขึ้นระหว่างอุปกรณ์ภายในเครือข่าย
นอกเหนือจากข้อดีที่กล่าวมาข้างต้นการรวม PFC ในหน่วยจ่ายไฟที่ทันสมัยยังเป็นไปตามข้อกำหนดตามที่กำหนดในยุโรปและญี่ปุ่นด้วย IEC61000-3-2 ซึ่งอุปกรณ์ไฟฟ้าทั้งหมดควรมีคุณสมบัติ
เงื่อนไขดังกล่าวข้างต้นได้รับการควบคุมสำหรับเครื่องใช้ไฟฟ้าส่วนใหญ่ซึ่งอาจได้รับการจัดอันดับที่สูงกว่า 75 วัตต์ภายใต้มาตรฐานอุปกรณ์คลาส D หรือสูงกว่าโดยระบุแอมพลิจูดสูงสุดของฮาร์มอนิกความถี่เส้นที่สูงถึง 39 ฮาร์มอนิก
นอกเหนือจากมาตรฐานเหล่านี้ยังใช้ PFC เพื่อรับรองประสิทธิภาพอื่น ๆ เช่น Energy Star 5.0 ที่สำคัญสำหรับคอมพิวเตอร์และ Energy Star 2.0 สำหรับระบบจ่ายไฟและชุดทีวีตั้งแต่ปี 2008
ความหมายของ Power Factor
การแก้ไข PFC หรือ Power Factor อาจกำหนดเป็นอัตราส่วนของกำลังจริงต่อกำลังไฟฟ้าปรากฏและแสดงเป็น:
PF = พลังจริง / พลังที่เห็นได้ชัดโดยที่พลังจริงแสดงเป็น
วัตต์ในขณะที่กำลังไฟฟ้าปรากฏเป็น VA
ในนิพจน์นี้กำลังที่แท้จริงจะถูกกำหนดเป็นค่าเฉลี่ยของผลคูณของกระแสและแรงดันไฟฟ้าในเฟสหรือรอบในขณะที่กำลังไฟฟ้าที่ปรากฏจะถือว่าเป็นค่า RMS ของปัจจุบันคูณด้วยแรงดันไฟฟ้า
สิ่งนี้ชี้ให้เห็นว่าเมื่อใดก็ตามที่กระแสและแรงดันไฟฟ้าเป็นรูปซายน์และอยู่ในเฟสซึ่งกันและกันตัวประกอบกำลังที่เป็นผลลัพธ์คือ 1.0
อย่างไรก็ตามในสภาวะที่กระแสไฟฟ้าพารามิเตอร์ของแรงดันไฟฟ้าเป็นรูปไซน์ แต่ไม่อยู่ในเฟสจะทำให้เกิดตัวประกอบกำลังที่เป็นโคไซน์ของมุมเฟส
เงื่อนไขของตัวประกอบกำลังที่อธิบายไว้ข้างต้นใช้ในกรณีที่แรงดันและกระแสทั้งสองเป็นคลื่นไซน์บริสุทธิ์ร่วมกับสถานการณ์ที่โหลดประกอบประกอบด้วยส่วนประกอบตัวต้านทานอุปนัยและตัวเก็บประจุซึ่งอาจไม่เป็นเชิงเส้นทั้งหมดในลักษณะนั้น ไม่ได้ปรับด้วยพารามิเตอร์กระแสอินพุตและแรงดันไฟฟ้า
โดยทั่วไปแล้วโทโพโลยี SMPS จะแนะนำอิมพีแดนซ์ที่ไม่ใช่เชิงเส้นเข้าในสายเมนเนื่องจากโครงสร้างวงจรที่อธิบายไว้ข้างต้น
SMPS ทำงานอย่างไร
วงจร SMPS โดยทั่วไปจะมีขั้นตอนของวงจรเรียงกระแสที่อินพุตซึ่งอาจเป็นครึ่งคลื่นหรือวงจรเรียงกระแสเต็มคลื่นและตัวเก็บประจุตัวกรองเสริมสำหรับการเก็บแรงดันไฟฟ้าที่แก้ไขไว้ในระดับสูงสุดของคลื่นไซน์ของแหล่งจ่ายอินพุตจนถึงเวลาสูงสุดถัดไป คลื่นไซน์จะปรากฏขึ้นและทำซ้ำรอบการชาร์จของตัวเก็บประจุนี้ทำให้ได้แรงดันไฟฟ้าคงที่สูงสุดที่ต้องการ
กระบวนการชาร์จตัวเก็บประจุในแต่ละรอบสูงสุดของ AC ต้องการที่อินพุตจะต้องมีกระแสไฟฟ้าเพียงพอเพื่อตอบสนองการใช้งานโหลดของ SMPS ระหว่างช่วงเวลาสูงสุดเหล่านี้
วงจรจะดำเนินการโดยการทิ้งกระแสไฟฟ้าขนาดใหญ่ลงในตัวเก็บประจุอย่างรวดเร็วซึ่งจะนำไปใช้กับโหลดโดยผ่านการคายประจุจนกว่าจะถึงรอบสูงสุดถัดไป
สำหรับรูปแบบการชาร์จและการคายประจุที่ไม่สม่ำเสมอนี้ขอแนะนำว่ากระแสพัลส์จากตัวเก็บประจุจะได้รับการจัดอันดับสูงกว่าความต้องการเฉลี่ยของโหลด 15%

เราสามารถเห็นได้ในรูปด้านบนว่าแม้จะมีการบิดเบือนแรงดันไฟฟ้าและพารามิเตอร์กระแสไฟฟ้าในเฟสซึ่งกันและกันอย่างเห็นได้ชัด
อย่างไรก็ตามหากเราใช้คำว่า 'เฟสมุมโคไซน์' กับข้างต้นจะทำให้เกิดการอนุมานที่ไม่ถูกต้องเกี่ยวกับแหล่งจ่ายไฟที่มีค่ากำลังไฟฟ้า 1.0
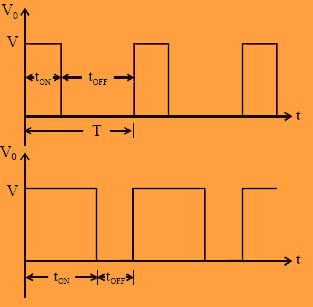
รูปคลื่นด้านบนและด้านล่างระบุปริมาณฮาร์มอนิกของกระแส
ในที่นี้จะมีการระบุ“ เนื้อหาฮาร์มอนิกพื้นฐาน” โดยเปรียบเทียบกับแอมพลิจูด 100% ในขณะที่ฮาร์มอนิกที่สูงกว่าจะแสดงเป็นเปอร์เซ็นต์เสริมของแอมพลิจูดพื้นฐาน
อย่างไรก็ตามเนื่องจากกำลังที่แท้จริงถูกกำหนดโดยองค์ประกอบพื้นฐานเท่านั้นในขณะที่ฮาร์มอนิกเสริมอื่น ๆ แสดงเฉพาะกำลังที่ปรากฏเท่านั้นตัวประกอบกำลังที่แท้จริงอาจค่อนข้างต่ำกว่า 1.0
เราเรียกค่าเบี่ยงเบนนี้ตามคำว่าปัจจัยการบิดเบือนซึ่งมีหน้าที่พื้นฐานในการก่อให้เกิดปัจจัยอำนาจที่ไม่เป็นเอกภาพในหน่วย SMPS
การแสดงออกถึงพลังที่แท้จริงและชัดเจน
นิพจน์ทั่วไปที่ระบุถึงความเชื่อมโยงระหว่างกำลังไฟฟ้าจริงและกำลังไฟฟ้าปรากฏดังต่อไปนี้:

โดยที่cosΦสร้างตัวประกอบการกระจัดที่โผล่ออกมาจากมุมเฟสΦระหว่างรูปคลื่นกระแส / แรงดันและcosΦหมายถึงปัจจัยการบิดเบือน

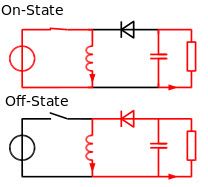
จากแผนภาพด้านล่างเราสามารถเห็นสถานการณ์ที่แสดงการแก้ไขตัวประกอบกำลังที่สมบูรณ์แบบ

เราจะเห็นได้ว่าที่นี่รูปคลื่นปัจจุบันค่อนข้างจำลองรูปคลื่นแรงดันไฟฟ้าได้อย่างดีเยี่ยมเนื่องจากทั้งสองกำลังทำงานอยู่ในเฟสและซิงค์กัน
ดังนั้นที่นี่จึงถือว่าฮาร์มอนิกกระแสอินพุตมีค่าเกือบเป็นศูนย์
การแก้ไขตัวประกอบกำลังเทียบกับการลดฮาร์มอนิก
เมื่อดูภาพประกอบก่อนหน้านี้จะเห็นได้ว่าเพาเวอร์แฟคเตอร์และฮาร์มอนิกต่ำทำงานประสานกัน
โดยทั่วไปรับรู้ว่าหากขีด จำกัด สำหรับฮาร์มอนิกที่เกี่ยวข้องถูกระบุไว้อาจช่วย จำกัด การปนเปื้อนของกระแสอินพุตในสายไฟโดยการกำจัดการรบกวนกระแสไฟฟ้ากับอุปกรณ์อื่น ๆ ในบริเวณใกล้เคียง
ดังนั้นในขณะที่การประมวลผลกระแสอินพุตอาจเรียกได้ว่าเป็น 'การแก้ไขตัวประกอบกำลัง' ขนาดเอาต์พุตของการปรับแต่งคิดว่าการประมวลผลนี้เข้าใจว่าเป็นเนื้อหาฮาร์มอนิกตามหลักเกณฑ์สากล
สำหรับโทโพโลยี SMPS โดยปกติแล้วองค์ประกอบการกระจัดจะอยู่ที่ความเป็นเอกภาพโดยประมาณซึ่งก่อให้เกิดความสัมพันธ์ต่อไปนี้ระหว่างตัวประกอบกำลังและการบิดเบือนฮาร์มอนิก

ในนิพจน์ THD แสดงถึง Total Harmonic Distortion เป็นผลรวมกำลังสองของฮาร์มอนิกที่เป็นอันตรายเหนือเนื้อหาพื้นฐานโดยแสดงน้ำหนักสัมพัทธ์ของเนื้อหาฮาร์มอนิกที่เกี่ยวข้องโดยอ้างอิงถึงคู่พื้นฐานสมการอื่นเชื่อมโยงค่าสัมบูรณ์ของ THD และ ไม่อยู่ในสัดส่วน% แสดงว่า THD จำเป็นต้องมีค่าเป็นศูนย์เพื่อสร้าง PF ที่เป็นเอกภาพ
ประเภทของการแก้ไขตัวประกอบกำลัง
ลักษณะรูปคลื่นอินพุตในรูปด้านบนแสดงให้เห็นถึงการแก้ไขตัวประกอบกำลังประเภท 'แอ็คทีฟ' ทั่วไปสำหรับอุปกรณ์ SMPS ที่นำมาใช้ระหว่างการกำหนดค่าวงจรเรียงกระแสอินพุตและตัวเก็บประจุตัวกรองและผ่านวงจรรวม PFC ที่ควบคุมการดำเนินการพร้อมกับวงจรที่เกี่ยวข้องสำหรับ ตรวจสอบให้แน่ใจว่ากระแสอินพุตสอดคล้องกันตามรูปคลื่นแรงดันไฟฟ้าอินพุต
การประมวลผลประเภทนี้อาจถือได้ว่าเป็น PFC ประเภทที่แพร่หลายมากที่สุดที่ใช้ในวงจร SMPS สมัยใหม่ดังที่เห็นในรูปด้านล่าง
เมื่อกล่าวเช่นนี้ก็ไม่ได้บังคับว่าจะต้องใช้เฉพาะเวอร์ชัน 'แอคทีฟ' ที่ใช้ ICs และเซมิคอนดักเตอร์เท่านั้นที่ใช้สำหรับ PFC ที่เสนอซึ่งจะมีรูปแบบการออกแบบอื่น ๆ ซึ่งอาจรับประกันว่า PFC ในปริมาณที่เหมาะสมตามปกติจะได้รับการต้อนรับ
เป็นที่สังเกตว่าในความเป็นจริงตัวเหนี่ยวนำตัวเดียวแทนที่ตำแหน่งของคู่ที่ 'แอ็คทีฟ' สามารถปฏิเสธฮาร์โมนิกส์ได้อย่างน่าพอใจโดยการควบคุมพีคและกระจายกระแสอย่างสม่ำเสมอสอดคล้องกับแรงดันไฟฟ้าอินพุตได้อย่างมีประสิทธิภาพ
การออกแบบ PFC แบบพาสซีฟ
อย่างไรก็ตามรูปแบบของการควบคุม PFC แบบพาสซีฟนี้อาจต้องการตัวเหนี่ยวนำ cored เหล็กขนาดใหญ่อย่างมีนัยสำคัญดังนั้นจึงสามารถใช้สำหรับการใช้งานที่ความกะทัดรัดไม่ใช่ข้อกำหนดที่สำคัญ (หน้า 12)
ตัวเหนี่ยวนำเดี่ยวแบบพาสซีฟอาจเป็นวิธีแก้ปัญหาที่รวดเร็วสำหรับ PFC แต่สำหรับการใช้งานที่มีกำลังวัตต์สูงขนาดอาจเริ่มไม่น่าสนใจเนื่องจากมีขนาดใหญ่จนไม่สามารถทำได้
ในกราฟด้านล่างเราสามารถเห็นลักษณะการป้อนข้อมูลของตัวแปร PC SMPS ขนาด 250 วัตต์จำนวนสามตัวซึ่งแต่ละตัวแสดงรูปคลื่นปัจจุบันที่สเกลแฟคเตอร์เทียบเท่า
เราสามารถเห็นได้อย่างง่ายดายว่าผลลัพธ์ที่ได้จาก PFC ที่ใช้ตัวเหนี่ยวนำแบบพาสซีฟนั้นมีค่าพีคปัจจุบันสูงกว่า 33% เมื่อเทียบกับตัวกรอง PFC ที่ใช้งานอยู่
แม้ว่าสิ่งนี้จะสามารถผ่านมาตรฐาน IEC61000-3-2 ได้ แต่ก็จะไม่ตรงกับกฎข้อกำหนด 0.9PF ที่เข้มงวดมากขึ้นล่าสุดและจะทำให้ระดับการยอมรับ QC ล้มเหลวตามมาตรฐานใหม่นี้
แผนภาพบล็อกพื้นฐาน

เนื่องจากแนวโน้มตลาดอิเล็กทรอนิกส์ที่กำลังดำเนินอยู่ซึ่งเราสามารถเห็นต้นทุนทองแดงที่เพิ่มสูงขึ้นพร้อมกับการเพิ่มขึ้นของกระบวนการแกนแม่เหล็กและการเปิดตัววัสดุเซมิคอนดักเตอร์ที่ทันสมัยราคาถูกกว่ามากจึงไม่น่าแปลกใจหากเราสังเกตเห็นแนวทาง PFC ที่ใช้งานอยู่ ได้รับความนิยมอย่างล้นหลามมากกว่าคู่ที่แฝงอยู่
และแนวโน้มนี้อาจเป็นที่รับรู้ว่าจะเติบโตอย่างแข็งแกร่งยิ่งขึ้นในอนาคตข้างหน้าโดยนำเสนอโซลูชัน PFC ขั้นสูงและปรับปรุงให้ดียิ่งขึ้นสำหรับนักออกแบบและผู้ผลิต SMPS จำนวนมาก

การเปรียบเทียบฮาร์โมนิกของสายอินพุตกับมาตรฐาน IEC610003-2
ในรูปด้านล่างเราจะเห็นร่องรอยของผลลัพธ์ SMPS ของพีซี 250 วัตต์ที่แยกจากกันสามรายการโดยอ้างอิงถึงข้อ จำกัด ของ IEC6000-3-2 ข้อ จำกัด ที่ระบุใช้ได้กับอุปกรณ์คลาส D ทั้งหมดเช่นพีซีทีวีและจอภาพ
ขีด จำกัด เนื้อหาฮาร์มอนิกที่แสดงได้รับการแก้ไขตามกำลังไฟฟ้าเข้าของอุปกรณ์ สำหรับผลิตภัณฑ์ที่เกี่ยวข้องกับไฟเช่นไฟ LED, ไฟ CFL, ข้อ จำกัด คลาส C จะเป็นไปตามปกติซึ่งจะเหมือนกับขีด จำกัด วัตต์อินพุต
ผลิตภัณฑ์อิเล็กทรอนิกส์อื่น ๆ ที่ไม่ใช่แบบธรรมดาพบขีด จำกัด PFC ที่กำหนดไว้ตามสัดส่วนกำลังไฟฟ้าเข้าขั้นต่ำ 600 วัตต์
หากเราดูที่การติดตาม PFC แบบพาสซีฟเราพบว่าแทบจะไม่สอดคล้องกับขีด จำกัด ที่ตั้งไว้เพียงแค่สัมผัสและไปที่สถานการณ์ (ที่ฮาร์มอนิก 3)

การวิเคราะห์คุณสมบัติ Passive PFC
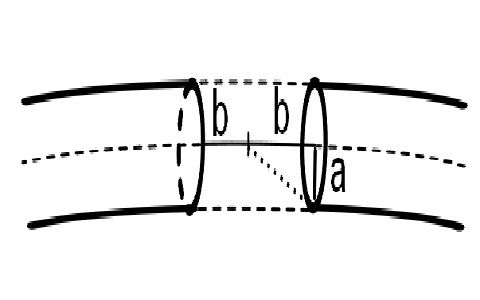
ในรูปต่อไปนี้เราจะเห็นตัวอย่างคลาสสิกของวงจร PFC แบบพาสซีฟที่ออกแบบมาสำหรับแหล่งจ่ายไฟพีซีแบบดั้งเดิม สิ่งที่น่าสังเกตคือการเชื่อมต่อของ center tap ของตัวเหนี่ยวนำ PFC กับแรงดันไฟฟ้าอินพุตของสายอินพุต
ในขณะที่อยู่ในโหมดการเลือก 220V (เปิดสวิตช์) ทั้งสองส่วนของตัวเหนี่ยวนำจะถูกนำไปใช้กับเครือข่ายวงจรเรียงกระแสที่ทำงานเหมือนวงจรเรียงกระแสแบบบริดจ์เต็มรูปแบบ
อย่างไรก็ตามในโหมด 110V (ปิดสวิตช์) เพียง 50% หรือครึ่งหนึ่งของขดลวดจะถูกใช้ผ่านส่วนด้านซ้ายของขดลวดที่กำลังดำเนินการในขณะที่ส่วน rectifier จะเปลี่ยนเป็นวงจร doubler rectifier ครึ่งคลื่น
เนื่องจากการเลือก 220V ถูกผูกไว้เพื่อสร้างประมาณ 330V หลังจากการแก้ไขคลื่นเต็มรูปแบบจึงเป็นอินพุตบัสสำหรับ SMPS และมีความเป็นไปได้ที่จะผันผวนอย่างมีนัยสำคัญตามแรงดันไฟฟ้าของสายอินพุต
ตัวอย่างแผนภาพวงจร

แม้ว่าการออกแบบ PFC แบบพาสซีฟนี้อาจดูค่อนข้างเรียบง่ายและน่าประทับใจด้วยประสิทธิภาพ แต่ก็อาจมีข้อเสียที่น่าสังเกตอยู่บ้าง
นอกเหนือจากลักษณะที่ใหญ่โตของ PFC แล้วสิ่งอื่น ๆ อีกสองอย่างที่ส่งผลต่อประสิทธิภาพของมันคือสิ่งแรกคือการรวมสวิตช์เชิงกลซึ่งทำให้ระบบเสี่ยงต่อความผิดพลาดของมนุษย์ที่อาจเกิดขึ้นได้ในขณะที่ใช้งานเครื่องและปัญหาการสึกหรอที่เกี่ยวข้อง
ประการที่สองแรงดันไฟฟ้าของเส้นที่ไม่มีความเสถียรส่งผลให้เกิดความไร้ประสิทธิภาพในด้านต้นทุนประสิทธิผลและความแม่นยำในการแปลงไฟ DC เป็น DC ที่เชื่อมโยงกับเอาต์พุต PFC
คอนโทรลเลอร์ Critical Conduction Mode (CrM)
ขั้นตอนของตัวควบคุมเรียกว่าโหมดการนำกระแสที่สำคัญซึ่งเรียกอีกอย่างว่าโหมดเปลี่ยนผ่านหรือโหมดการนำเส้นเขตแดน (BCM) คือการกำหนดค่าวงจรซึ่งสามารถพบได้อย่างมีประสิทธิภาพในแอปพลิเคชั่นอิเล็กทรอนิกส์แสงสว่าง แม้ว่าจะไม่ยุ่งยากกับการใช้งาน แต่คอนโทรลเลอร์เหล่านี้ก็มีราคาค่อนข้างแพง
แผนภาพ 1-8 ต่อไปนี้แสดงให้เห็นถึงการออกแบบวงจรคอนโทรลเลอร์ CrM ปกติ

โดยทั่วไปแล้ว PFC คอนโทรลเลอร์ CrM จะมีวงจรประเภทที่แสดงด้านบนซึ่งสามารถเข้าใจได้ด้วยความช่วยเหลือของประเด็นต่อไปนี้:
อินพุตของสเตจตัวคูณอ้างอิงจะได้รับสัญญาณที่มีขนาดเหมาะสมจากเอาต์พุตของแอมพลิฟายเออร์ข้อผิดพลาดที่เกี่ยวข้องซึ่งมีขั้วความถี่ต่ำ
อินพุตอื่นของตัวคูณสามารถมองเห็นได้โดยอ้างอิงกับแรงดันไฟฟ้าที่ยึด DC ที่เสถียรซึ่งสกัดจากอินพุตสาย AC ที่แก้ไขแล้ว
ดังนั้นผลลัพธ์ที่ได้จากตัวคูณจึงเป็นผลคูณของ DC สัมพัทธ์จากเอาต์พุตแอมป์ข้อผิดพลาดและสัญญาณอ้างอิงในรูปแบบของคลื่นไซน์ AC แบบคลื่นเต็มจากอินพุต AC
เอาท์พุทจากระยะตัวคูณนี้สามารถมองเห็นได้ในรูปแบบของคลื่นไซน์คลื่นเต็มรูปแบบ แต่ลดขนาดลงอย่างเหมาะสมตามสัดส่วนกับสัญญาณข้อผิดพลาดที่ใช้ (ปัจจัยการเพิ่ม) ที่ใช้เป็นข้อมูลอ้างอิงสำหรับแรงดันไฟฟ้าขาเข้า
ความกว้างของสัญญาณของแหล่งกำเนิดนี้ได้รับการปรับแต่งอย่างเหมาะสมเพื่อให้ใช้พลังงานเฉลี่ยที่ระบุที่เหมาะสมและเพื่อให้แน่ใจว่ามีแรงดันไฟฟ้าขาออกที่มีการควบคุมที่เหมาะสม
ขั้นตอนที่รับผิดชอบในการประมวลผลแอมพลิจูดปัจจุบันทำให้กระแสไหลตามรูปคลื่นเอาต์พุตจากตัวคูณอย่างไรก็ตามความกว้างของสัญญาณกระแสความถี่ของเส้น (หลังจากการปรับให้เรียบ) อาจเป็นครึ่งหนึ่งของการอ้างอิงนี้จากสเตจตัวคูณ .
ในที่นี้การดำเนินการโดยการสร้างวงจรปัจจุบันอาจเข้าใจได้ดังนี้:

อ้างอิงจากแผนภาพด้านบน Vref ย่อมาจากสัญญาณออกจากระยะตัวคูณซึ่งถูกป้อนเพิ่มเติมไปยังหนึ่งใน opamps ของเครื่องเปรียบเทียบที่มีอินพุตที่สองอ้างอิงกับสัญญาณรูปคลื่นปัจจุบัน
บนสวิตช์เปิด / ปิดกระแสไฟฟ้าในตัวเหนี่ยวนำจะค่อยๆเพิ่มขึ้นอย่างช้าๆจนกระทั่งสัญญาณข้าม shunt ถึงระดับ Vref
สิ่งนี้บังคับให้ตัวเปรียบเทียบเปลี่ยนเอาท์พุทจากเปิดเป็นปิดการปิดสวิตช์ไฟไปยังวงจร
ทันทีที่สิ่งนี้เกิดขึ้นแรงดันไฟฟ้าที่ค่อยๆลาดไปทั่วตัวเหนี่ยวนำจะเริ่มลดลงอย่างช้าๆไปที่ศูนย์และเมื่อสัมผัสกับศูนย์เอาต์พุต opamp จะเปลี่ยนกลับและเปิดอีกครั้งและวงจรจะดำเนินการซ้ำ
ตามชื่อของคุณสมบัติข้างต้นแสดงว่ารูปแบบการควบคุมของระบบไม่อนุญาตให้กระแสไฟฟ้าเหนี่ยวนำยิงเกินขีด จำกัด ที่กำหนดไว้ล่วงหน้าในโหมดการสลับต่อเนื่องและไม่ต่อเนื่อง
การจัดเรียงนี้ช่วยในการทำนายและคำนวณความสัมพันธ์ระหว่างระดับกระแสสูงสุดโดยเฉลี่ยของผลลัพธ์ที่เป็นผลลัพธ์จาก opamp เนื่องจากการตอบสนองอยู่ในรูปของคลื่นสามเหลี่ยมค่าเฉลี่ยของรูปคลื่นจึงบ่งบอกได้อย่างแม่นยำถึง 50% ของยอดจริงของรูปคลื่นสามเหลี่ยม
นี่หมายความว่าค่าเฉลี่ยผลลัพธ์ของสัญญาณปัจจุบันของคลื่นสามเหลี่ยมจะเป็น = ตัวเหนี่ยวนำกระแส x R ความรู้สึกหรือใส่เพียงครึ่งหนึ่งของระดับอ้างอิงที่ตั้งไว้ล่วงหน้า (Vref) ของ opamp
ความถี่ของหน่วยงานกำกับดูแลโดยใช้หลักการข้างต้นจะขึ้นอยู่กับแรงดันไฟฟ้าและกระแสโหลด ความถี่อาจสูงกว่ามากที่แรงดันไฟฟ้าของสายที่สูงขึ้นและอาจแตกต่างกันไปเนื่องจากอินพุตสายแตกต่างกันไป
ความถี่หนีบโหมดการนำวิกฤตที่สำคัญ (FCCrM)
แม้จะได้รับความนิยมในแอปพลิเคชั่นควบคุม PFC ของแหล่งจ่ายไฟอุตสาหกรรมต่างๆ แต่คอนโทรลเลอร์ CrM ที่อธิบายไว้ข้างต้นเกี่ยวข้องกับข้อบกพร่องบางประการโดยธรรมชาติ
ข้อบกพร่องหลักของการควบคุม PFC แบบแอคทีฟประเภทนี้คือความไม่เสถียรของความถี่ตามเงื่อนไขของสายและโหลดซึ่งแสดงความถี่ที่เพิ่มขึ้นพร้อมกับโหลดที่เบาลงและแรงดันไฟฟ้าของสายที่สูงขึ้นและในขณะที่แต่ละครั้งที่คลื่นไซน์อินพุทเข้าใกล้จุดตัดเป็นศูนย์
หากมีความพยายามที่จะแก้ไขปัญหานี้โดยการเพิ่มแคลมป์ความถี่ผลลัพธ์จะได้ผลลัพธ์ที่มีรูปคลื่นกระแสที่ผิดเพี้ยนซึ่งดูเหมือนจะหลีกเลี่ยงไม่ได้เนื่องจาก 'Ton' ยังไม่ได้รับการปรับแต่งสำหรับขั้นตอนนี้

อย่างไรก็ตามการพัฒนาเทคนิคทางเลือกช่วยให้สามารถแก้ไขค่ากำลังไฟฟ้าได้อย่างแท้จริงแม้ในโหมดไม่ต่อเนื่อง (DCM) หลักการทำงานสามารถศึกษาได้ในรูปด้านล่างและด้วยสมการที่แนบมา

จากแผนภาพด้านบนสามารถประเมินกระแสสูงสุดของขดลวดได้โดยการแก้:

กระแสขดลวดเฉลี่ยที่อ้างอิงถึงรอบการเปลี่ยน (ซึ่งสมมติเพิ่มเติมว่าเป็นกระแสของเส้นทันทีสำหรับรอบการเปลี่ยนที่กำหนดเนื่องจากความถี่ในการสลับมักจะสูงกว่าความถี่ของเส้นที่การเปลี่ยนแปลงของแรงดันไฟฟ้าของเส้นเกิดขึ้น ) แสดงด้วยสูตร:

การรวมความสัมพันธ์ข้างต้นและการทำให้ข้อกำหนดง่ายขึ้นจะให้สิ่งต่อไปนี้:

การแสดงออกข้างต้นบ่งชี้อย่างชัดเจนและเป็นนัยว่าในกรณีที่มีการใช้วิธีการที่อัลกอริทึมดูแลรักษาตันรีไซเคิล / Tsw ในระดับคงที่จะช่วยให้เราสามารถบรรลุกระแสคลื่นไซน์ที่มีตัวประกอบกำลังเอกภาพแม้ในช่วงที่ไม่ต่อเนื่อง โหมดการทำงาน
แม้ว่าการพิจารณาข้างต้นจะแสดงให้เห็นถึงประโยชน์ที่แตกต่างกันบางประการสำหรับเทคนิคตัวควบคุม DCM ที่นำเสนอ แต่ดูเหมือนจะไม่ใช่ตัวเลือกที่ดีที่สุดเนื่องจากระดับกระแสไฟฟ้าสูงสุดที่เกี่ยวข้องดังแสดงในตารางต่อไปนี้:

เพื่อให้บรรลุเงื่อนไข PFC ในอุดมคติแนวทางที่สมเหตุสมผลคือการใช้เงื่อนไขที่การดำเนินการ DCM และโหมด Crm ถูกรวมเข้าด้วยกันเพื่อการรีดนมออกมาอย่างดีที่สุดจากทั้งสองคู่
ดังนั้นเมื่อสภาวะโหลดไม่หนักและ CrM ทำงานที่ความถี่สูงวงจรจะใช้โหมด DCM ของการทำงานและในกรณีที่กระแสโหลดสูงเงื่อนไข Crm จะคงอยู่เพื่อให้จุดสูงสุดในปัจจุบันทำ ไม่มีแนวโน้มที่จะข้ามขีด จำกัด สูงที่ไม่พึงปรารถนา
การเพิ่มประสิทธิภาพแบบนี้ในโหมดควบคุมสองโหมดที่แนะนำสามารถมองเห็นได้ดีที่สุดในรูปต่อไปนี้ซึ่งประโยชน์ของโหมดควบคุมทั้งสองจะถูกรวมเข้าด้วยกันเพื่อให้ได้โซลูชันที่ต้องการมากที่สุด

ยังคงโหมด Conduction
โหมดการนำไฟฟ้าแบบต่อเนื่องของ PFC อาจได้รับความนิยมอย่างมากในการออกแบบ SMPS เนื่องจากคุณสมบัติและช่วงการใช้งานที่ยืดหยุ่นและข้อดีหลายประการที่เกี่ยวข้อง
ในโหมดนี้ความเค้นสูงสุดในปัจจุบันจะยังคงอยู่ในระดับที่ต่ำกว่าส่งผลให้ลดการสูญเสียการสลับภายในส่วนประกอบที่เกี่ยวข้องให้น้อยที่สุดและยิ่งไปกว่านั้นการกระเพื่อมของอินพุตจะแสดงผลในระดับต่ำสุดด้วยความถี่ที่ค่อนข้างคงที่ซึ่งจะช่วยให้กระบวนการเรียบง่ายขึ้นมากสำหรับ เหมือน.
แอตทริบิวต์ต่อไปนี้ที่เกี่ยวข้องกับประเภท CCM ของ PFC จะต้องได้รับการกล่าวถึงอย่างละเอียดอีกเล็กน้อย
การควบคุม Vrms2
คุณลักษณะที่สำคัญอย่างหนึ่งที่มีการออกแบบ PFC ส่วนใหญ่นำไปใช้ในระดับสากลคือสัญญาณอ้างอิงซึ่งจำเป็นต้องมีการเลียนแบบแบบบริภาษลงของโวลต์อินพุตที่แก้ไขแล้ว
ในที่สุดความเทียบเท่าที่ถูกปรับลดลงของแรงดันไฟฟ้าขาเข้าจะถูกนำไปใช้ในวงจรเพื่อสร้างรูปคลื่นที่ถูกต้องสำหรับกระแสเอาต์พุต
ดังที่ได้กล่าวไว้ข้างต้นโดยปกติจะใช้สเตจวงจรตัวคูณสำหรับการดำเนินการนี้ แต่อย่างที่เราทราบกันดีว่าสเตจวงจรตัวคูณอาจมีต้นทุนที่คุ้มค่ากว่าระบบตัวคูณอินพุต twn แบบเดิม
เค้าโครงตัวอย่างคลาสสิกที่จะเห็นในรูปด้านล่างซึ่งแสดงให้เห็นถึงแนวทาง PFC โหมดต่อเนื่อง
ดังที่เห็นได้ที่นี่ตัวแปลงบูสต์จะถูกทริกเกอร์ด้วยความช่วยเหลือของ PWM โหมดกระแสเฉลี่ยซึ่งจะรับผิดชอบในการกำหนดขนาดของกระแสไฟฟ้าเหนี่ยวนำ (กระแสอินพุตสำหรับตัวแปลง) โดยอ้างอิงกับสัญญาณกระแสคำสั่ง V (i) ซึ่งอาจถูกมองว่าลดขนาดลงเทียบเท่ากับแรงดันไฟฟ้าอินพุต V (นิ้ว) เป็นสัดส่วนของ VDIV
สิ่งนี้ดำเนินการโดยการหารสัญญาณแรงดันไฟฟ้าผิดพลาดด้วยกำลังสองของสัญญาณแรงดันไฟฟ้าขาเข้า (ปรับให้เรียบโดย Cf ตัวเก็บประจุเพื่อสร้างปัจจัยการปรับขนาดที่ง่ายขึ้นโดยอ้างอิงกับระดับแรงดันไฟฟ้าขาเข้า)

แม้ว่าคุณอาจรู้สึกอึดอัดเล็กน้อยที่เห็นสัญญาณข้อผิดพลาดถูกหารด้วยกำลังสองของแรงดันไฟฟ้าขาเข้าเหตุผลที่อยู่เบื้องหลังการวัดนี้คือการสร้างอัตราขยายวง (หรือการตอบสนองที่ขึ้นกับชั่วคราว) ซึ่งอาจไม่ได้ขึ้นอยู่กับแรงดันไฟฟ้าอินพุต ทริกเกอร์
กำลังสองของแรงดันไฟฟ้าที่ตัวส่วนทำให้เป็นกลางด้วยค่าของ Vsin พร้อมกับฟังก์ชั่นการถ่ายโอนของตัวควบคุม PWM (สัดส่วนของความชันของกราฟปัจจุบันของความคลาดเคลื่อนกับแรงดันไฟฟ้าอินพุต)
อย่างไรก็ตามข้อเสียอย่างหนึ่งของรูปแบบของ PFC นี้คือความยืดหยุ่นของตัวคูณซึ่งบังคับให้ขั้นตอนนี้ต้องออกแบบมากเกินไปโดยเฉพาะอย่างยิ่งส่วนการจัดการพลังงานของวงจรเพื่อให้สามารถรักษาสถานการณ์การกระจายพลังงานได้ในกรณีที่เลวร้ายที่สุด
การควบคุมโหมดกระแสเฉลี่ย
ในรูปด้านบนเราจะเห็นว่าสัญญาณอ้างอิงที่สร้างจากตัวคูณ V (i) หมายถึงรูปร่างของรูปคลื่นและช่วงการปรับขนาดของกระแสอินพุต PFC อย่างไร
ขั้นตอน PWM ที่ระบุจะรับผิดชอบในการตรวจสอบให้แน่ใจว่ากระแสอินพุตเฉลี่ยอยู่ในระดับเดียวกับค่าอ้างอิง ขั้นตอนนี้ดำเนินการผ่านสเตจคอนโทรลเลอร์โหมดกระแสเฉลี่ยดังที่เห็นในรูปด้านล่าง

การควบคุมโหมดกระแสเฉลี่ยโดยทั่วไปได้รับการกำหนดค่าเพื่อควบคุมกระแสเฉลี่ย (อินพุต / เอาต์พุต) โดยอ้างอิงกับสัญญาณควบคุม Icp ซึ่งจะถูกสร้างขึ้นโดยใช้ลูป DC ความถี่ต่ำผ่านขั้นตอนวงจรขยายข้อผิดพลาดและนี่ไม่ใช่อะไรเลยนอกจาก กระแสเทียบเท่าที่สอดคล้องกับสัญญาณ Vi ซึ่งแสดงในรูปก่อนหน้านี้
เครื่องขยายเสียงกระแสไฟฟ้าขั้นตอนทำหน้าที่เป็นตัวรวมกระแสเช่นเดียวกับเครื่องขยายข้อผิดพลาดเพื่อควบคุมรูปร่างของรูปคลื่นในขณะที่สัญญาณ Icp ซึ่งสร้างขึ้นใน Rcp จะมีหน้าที่ควบคุมแรงดันไฟฟ้าอินพุต DC
เพื่อให้แน่ใจว่าการตอบสนองเชิงเส้นจากแอมพลิฟายเออร์ปัจจุบันอินพุตจำเป็นต้องใกล้เคียงกันซึ่งหมายความว่าความต่างศักย์ที่สร้างขึ้นใน R (shunt) จะต้องใกล้เคียงกับแรงดันไฟฟ้าที่สร้างขึ้นรอบ Rcp เนื่องจากเราไม่สามารถมี DC ผ่าน อินพุตตัวต้านทานแบบไม่กลับด้านของแอมพลิฟายเออร์ปัจจุบัน
เอาต์พุตที่สร้างโดยแอมพลิฟายเออร์ปัจจุบันควรเป็นสัญญาณผิดพลาด 'ความถี่ต่ำ' ขึ้นอยู่กับกระแสเฉลี่ยของ shunt เช่นเดียวกับสัญญาณจาก Isp
ตอนนี้ออสซิลเลเตอร์สร้างสัญญาณฟันเลื่อยซึ่งใช้สำหรับเปรียบเทียบสัญญาณข้างต้นกับมันเช่นเดียวกับการออกแบบการควบคุมโหมดแรงดันไฟฟ้า
ผลลัพธ์นี้ในการสร้าง PWM ซึ่งพิจารณาจากการเปรียบเทียบสัญญาณทั้งสองที่กล่าวถึงข้างต้น
โซลูชั่น PFC ขั้นสูง
วิธีการต่างๆของการควบคุม PFC ตามที่กล่าวไว้ข้างต้น (CrM, CCM, DCM) และตัวแปรช่วยให้นักออกแบบมีตัวเลือกที่หลากหลายในการกำหนดค่าวงจร PFC
อย่างไรก็ตามแม้จะมีตัวเลือกเหล่านี้ แต่การค้นหาอย่างสม่ำเสมอเพื่อให้ได้โมดูลที่ดีขึ้นและก้าวหน้ามากขึ้นในแง่ของประสิทธิภาพทำให้การออกแบบที่ซับซ้อนมากขึ้นสามารถวินิจฉัยได้สำหรับแอปพลิเคชันเหล่านี้
เราจะพูดคุยเพิ่มเติมเกี่ยวกับเรื่องนี้เนื่องจากบทความนี้ได้รับการอัปเดตล่าสุดในหัวข้อนี้
คู่ของ: วิธีเลือกเครื่องชาร์จที่เหมาะสมสำหรับแบตเตอรี่ Li-Ion ถัดไป: วงจร Solar E Rickshaw