โพสต์อธิบายเกี่ยวกับประตูหมุนอัตโนมัติหรือวงจรประตูที่ควบคุมด้วย PWM ซึ่งมีการทำงานเปิด / ปิดอัตโนมัติผ่านขั้นตอนการขัดขวางภาพถ่าย นายบรูซคลาร์กขอความคิดนี้
ข้อกำหนดทางเทคนิค
ขอบคุณสำหรับบริการที่ยอดเยี่ยมจริงๆ
คุณช่วยกรุณาช่วยแก้ไขวงจรของคุณได้ไหมที่:
อธิบายวงจรควบคุมความเร็วมอเตอร์ DC อย่างง่าย 3 แบบ
ฉันต้องการใช้ arduino PWM เพื่อควบคุมมอเตอร์ควบคุมประตู 12Vdc (จะวาด 9 แอมป์เมื่อเริ่มต้น) โดยใช้ทรานซิสเตอร์กำลัง MJ11015G
ภาวะที่กลืนไม่เข้าคายไม่ออกของฉันอยู่ที่ข้อกำหนดในการจ่ายพลังงานที่เพียงพอให้กับฐานทรานซิสเตอร์และการปรับเปลี่ยนวงจรที่เกี่ยวข้องภายในข้อ จำกัด ของ arduino Uno เป็นความเข้าใจที่ จำกัด มากของฉันที่ว่าประตูกลับด้านจะไม่เพียงพอสำหรับแอปพลิเคชันนี้
ฉันรู้ว่าขีด จำกัด ของ Arduino คือ 40mA ต่อขาเอาต์พุต ถ้าฉันจะใช้เอาต์พุต PWM ผ่านตัวต้านทาน 120 โอห์มโดยตรงกับฐานของทรานซิสเตอร์เหล่านี้ฉันจะโอเคไหม? หากไม่ได้โปรดแนะนำทางเลือกอื่น
โดยทั่วไปฉันต้องการใช้มอเตอร์สำหรับประตูหมุนหรือประตูอัตโนมัติและด้วยเหตุนี้จึงจำเป็นต้องมีการหยุดการทำงานและการทำงานย้อนกลับ โฟโตอินเทอร์ทรูปเตอร์จะถูกใช้เพื่อกำหนดตำแหน่งของประตูและทำให้เกิดการหยุดชั่วขณะจากนั้นย้อนกลับไปยังตำแหน่งเริ่มต้นซึ่งจะถูกทำดัชนีผ่านเซ็นเซอร์
ประตูอาจค่อนข้างหนักและมีพื้นที่ จำกัด มากดังนั้นฉันจึงวางแผนที่จะขับประตูโดยใช้มอเตอร์ที่กล่าวถึงผ่านกระปุกเกียร์ทดรอบ
ความช่วยเหลือของคุณจะได้รับการชื่นชมอย่างจริงใจที่สุด
ขอแสดงความนับถือ
บรูซคลาร์ก
การออกแบบ
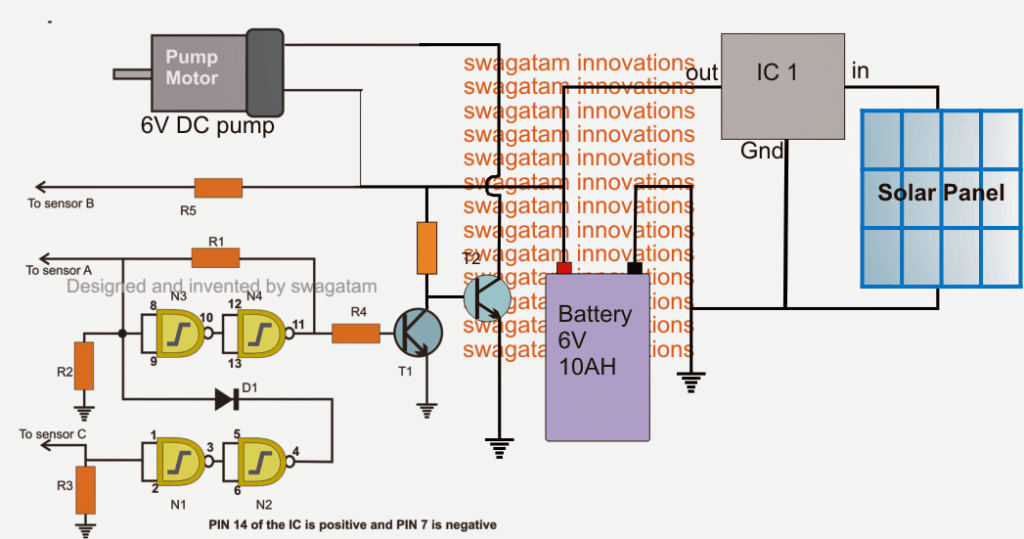
วงจรควบคุมมอเตอร์แบบ PWM ที่เรียบง่ายมากพร้อมด้วยแรงบิดสูงและคุณสมบัติหยุด / ถอยหลังทันทีสามารถดูได้ในแผนภาพที่กำหนดและอาจใช้สำหรับการใช้งานประตูหมุนหรือประตูอัตโนมัติที่เสนอ
แผนผัง PWM

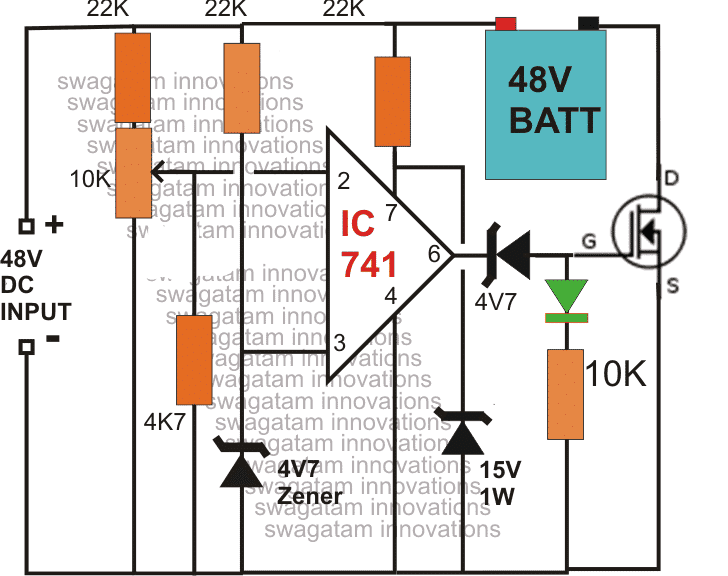
หากตั้งใจจะใช้ PWM ที่ใช้ Arduino เวที IC ในแผนภาพด้านบนอาจถูกลบออกและสามารถใช้ PWM จาก Arduino โดยตรงที่ฐานของ mosfet ผ่านตัวต้านทาน 10 โอห์มดังที่แสดงด้านล่าง
ไดร์เวอร์รีเลย์ DPDT

ส่วนรายการ
R1 = 10K
R2 = 47 โอห์ม
P1 = 100K POT
D1, D2 = 1N4148
D3 = MUR1560
C1, C2 = 0.1uF / 100V
Z1 = 15V, 1/2 วัตต์
Q1 = IRF540
N1 - N6 = IC MM74C14
DPDT = DPST SWITCH หรือ DPDT RELAY
การทำงานของวงจร
วงจรแรกด้านบนซึ่งไม่ได้ใช้อินพุต Arduino ได้รับการกำหนดค่าประมาณ 6 hex-inverter Schmidt NOT gates จาก IC MM74C14 โดยที่ N1 สร้างเครื่องกำเนิดพัลส์คลื่นสี่เหลี่ยมพื้นฐาน N2 ใช้สำหรับตรวจจับวัฏจักรหน้าที่ของพัลส์ที่สร้างโดย N1 ผ่านหม้อ P1 ในขณะที่เหลือ ประตูมีสายเป็นบัฟเฟอร์ .
P1 ใช้สำหรับกำหนดความเร็วที่ประตูควรเปิดและปิดโดยอัตโนมัติ
เอาต์พุต PWM สุดท้ายที่ได้จากเอาต์พุตของบัฟเฟอร์ N3 ถึง N6 จะถูกนำไปใช้กับมอสเฟ็ทไดรเวอร์ Q1 ซึ่งจะทำหน้าที่ควบคุมความเร็วของมอเตอร์ที่ต่ออยู่ขึ้นอยู่กับข้อมูล PWM ที่ป้อน
สวิตช์ DPDT สามารถมองเห็นได้ที่ขั้วมอเตอร์และมอสเฟตสวิตช์นี้ใช้เพื่อรับการเบรกทันทีและการหมุนกลับของมอเตอร์
สิ่งที่ดีเกี่ยวกับวงจรนี้คือมันขึ้นอยู่กับการกำหนดค่าไดรเวอร์ H-bridge เพื่อให้บรรลุการทำงานของการพลิกของมอเตอร์ แต่จะใช้สวิตช์ DPDT แบบเดียวกัน
ตามคำขอสำหรับการดำเนินการเปิดและปิดประตูอัตโนมัติผ่านอุปกรณ์ที่ไวต่อภาพถ่าย DPDT สามารถถูกแทนที่ด้วยรีเลย์ DPDT และขดลวดของรีเลย์นี้สามารถควบคุมผ่านอุปกรณ์ที่ไวต่อภาพถ่ายที่ต้องการ (ผู้ขัดขวางภาพถ่าย) เช่น เป็นโฟโต้ไดโอดหรือ LDR
ขั้นตอนการขัดขวางภาพถ่ายจะได้รับการอัปเดตเร็ว ๆ นี้
ก่อนหน้านี้: สิ่งที่เกาะอยู่ใน GTI (Grid Tie Inverter) ถัดไป: การปรับแต่งไฟเครื่องหมายด้านข้างรถเป็นเครื่องหมายด้านข้างแบบกะพริบ