อุปกรณ์เครื่องกลไฟฟ้าหรือเครื่องจักรที่ใช้เพื่อวัตถุประสงค์ต่างๆและได้รับการควบคุมและดำเนินการโดยใช้เทคนิคการเขียนโปรแกรมเรียกว่าหุ่นยนต์ หุ่นยนต์มีหลากหลายประเภทตามการใช้งานเช่น หุ่นยนต์อุตสาหกรรม หุ่นยนต์ทหารหุ่นยนต์อวกาศหุ่นยนต์ในประเทศหุ่นยนต์เดินได้หุ่นยนต์ปีนเขาและอื่น ๆ ขั้นสูงสุด โครงการหุ่นยนต์ กำลังได้รับการพัฒนาเพื่อใช้งานในด้านต่างๆอย่างมีประสิทธิภาพสำหรับแอพพลิเคชั่นต่างๆ ในบทความนี้ให้เราพูดคุยเกี่ยวกับโครงการหุ่นยนต์ประเภทพิเศษ ได้แก่ การต่อแถวตามยานยนต์หุ่นยนต์ที่มีกลไกการเดินและปีนเขา
ยานยนต์

โครงการหุ่นยนต์สำหรับนักศึกษาวิศวกรรม
ยานยนต์ เป็นเครื่องจักรประเภทพิเศษที่ออกแบบมาเพื่อเคลื่อนที่บนพื้นดินในอากาศใต้น้ำและในอวกาศโดยไม่มีมนุษย์อยู่บนเรือ ยานยนต์เหล่านี้ควบคุมและดำเนินการโดย เซ็นเซอร์ต่างๆ ตามระบบควบคุม ยานยนต์หุ่นยนต์ได้รับการออกแบบมาเป็นพิเศษเพื่อใช้ในสภาวะที่มนุษย์ไม่สามารถเข้าไปได้เช่นอุบัติเหตุจากไฟไหม้อุณหภูมิที่สูงมากหรือต่ำมากเป็นต้น
Line Follower Robot

Line Follower Robot
ยานยนต์หุ่นยนต์ที่เคลื่อนที่โดยไปตามเส้นทางหรือเส้นเฉพาะสามารถเรียกได้ว่าเป็น หุ่นยนต์ผู้ติดตามสาย . หุ่นยนต์ผู้ติดตามสายเหล่านี้ใช้เป็นพิเศษในงานอุตสาหกรรมเพื่อวัตถุประสงค์พิเศษเช่นการขนส่งชิ้นส่วนต่างๆหรือเครื่องจักรหรือยานพาหนะ (รถยนต์จักรยาน ฯลฯ ) โดยเดินตามเส้นเฉพาะจากจุดหนึ่ง (สร้างหน่วย) ไปยังอีกจุดหนึ่ง (หน่วยประกอบ) .
เส้นปกติตามยานยนต์ที่มีคุณสมบัติพิเศษเช่นกลไกการเดินและปีนเขาเป็นหนึ่งใน โครงการหุ่นยนต์ที่น่าสนใจสำหรับนักศึกษาวิศวกรรม ซึ่งสามารถใช้กับแอพพลิเคชั่นต่างๆ ขั้นตอนง่ายๆในการออกแบบหุ่นยนต์ผู้ติดตามไลน์พร้อมกลไกการเดินและปีนเขาแสดงไว้ด้านล่าง
ขั้นตอนที่ 1: รวบรวมส่วนประกอบที่จำเป็น

ส่วนประกอบไฟฟ้าและอิเล็กทรอนิกส์
ส่วนประกอบที่จำเป็นสำหรับสายการออกแบบต่อจากยานยนต์หุ่นยนต์ที่มีกลไกการเดินและการปีนเขาจะต้องประมาณตามการใช้งานหุ่นยนต์ รวบรวมส่วนประกอบไฟฟ้าและอิเล็กทรอนิกส์ทั้งหมดเช่นตัวต้านทานตัวเก็บประจุตัวส่งสัญญาณ IR มอเตอร์กระแสตรงทรานซิสเตอร์ตัวหุ่นยนต์และโฟโตไดโอดที่มีการจัดอันดับที่เหมาะสมพร้อมกับชิ้นส่วนอื่น ๆ เช่นกระดาษแข็งสลักเกลียวถั่วแถบอลูมิเนียม ฯลฯ ตามความต้องการ
ขั้นตอนที่ 2: การวิเคราะห์วงจรสำหรับ Line Follower Robot

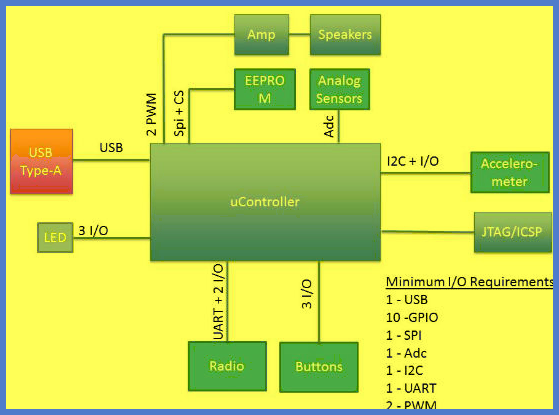
บรรทัดต่อจากยานยนต์หุ่นยนต์ขยายได้เป็นแผนภาพบล็อกหุ่นยนต์เดินและปีนเขา
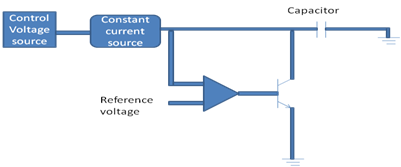
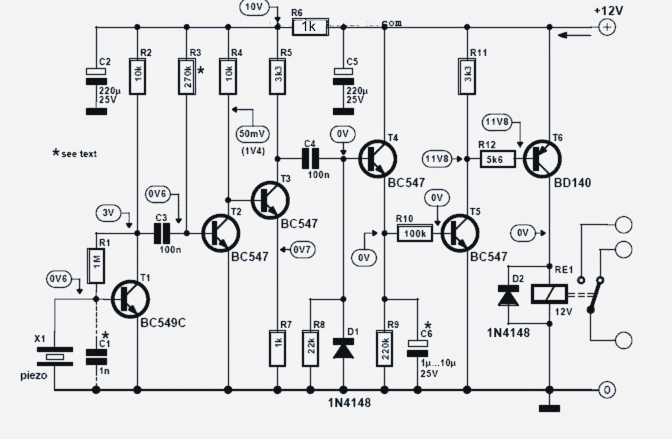
ออกแบบแผนภาพบล็อกของวงจรโครงการเป็นหลักด้วยบล็อกต่างๆเช่น a บล็อกแหล่งจ่ายไฟ , IR LED และโฟโตไดโอดบล็อกและอื่น ๆ หลังจากรวบรวมส่วนประกอบแล้วให้วิเคราะห์การออกแบบวงจรตามการทำงานของส่วนประกอบต่างๆที่ใช้ จากนั้นวางส่วนประกอบบนเขียงหั่นขนมแบบไม่บัดกรีตามแผนภาพวงจรโดยใช้สายเชื่อมต่อเพื่อทดสอบการทำงานของวงจรก่อนที่จะประกอบวงจรบน PCB ด้วยการทดสอบวงจรบนเขียงหั่นขนมแบบไม่บัดกรีหากมีการเปลี่ยนแปลงใด ๆ ที่จำเป็นในวงจรหรือการจัดอันดับของส่วนประกอบการสลับสามารถทำได้อย่างง่ายดายโดยไม่ต้องเสียเงินและเวลาในการเปลี่ยนส่วนประกอบหรือเพื่อปรับเปลี่ยนการออกแบบวงจร
ขั้นตอนที่ 3: การประกอบและการบัดกรีส่วนประกอบ

บรรทัดต่อจากยานยนต์หุ่นยนต์ขยายไปสู่โครงการหุ่นยนต์เดินและปีนเขา
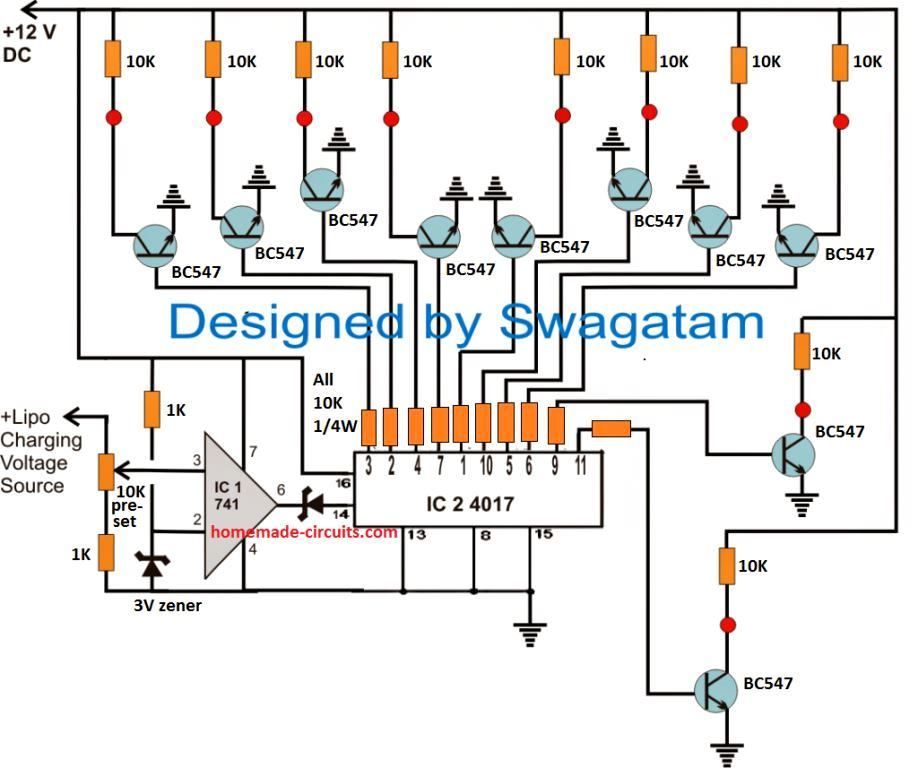
ดังนั้นหลังจากวิเคราะห์การออกแบบวงจรแล้วให้ประกอบส่วนประกอบตามแผนภาพวงจรบน PCB จากนั้นบัดกรีวงจรโดยใช้ปืนบัดกรีและลวดบัดกรีโดยปฏิบัติตามแนวทางการบัดกรีที่เหมาะสม เชื่อมต่อชิ้นส่วนทั้งหมดของหุ่นยนต์ให้ถูกต้องเพื่อสร้างหุ่นยนต์ผู้ติดตามตามที่แสดงในภาพด้านบนและติดกาวชิ้นส่วนของหุ่นยนต์หากจำเป็น
ขั้นตอนที่ 4: การทำงานของ Line Follower Robot
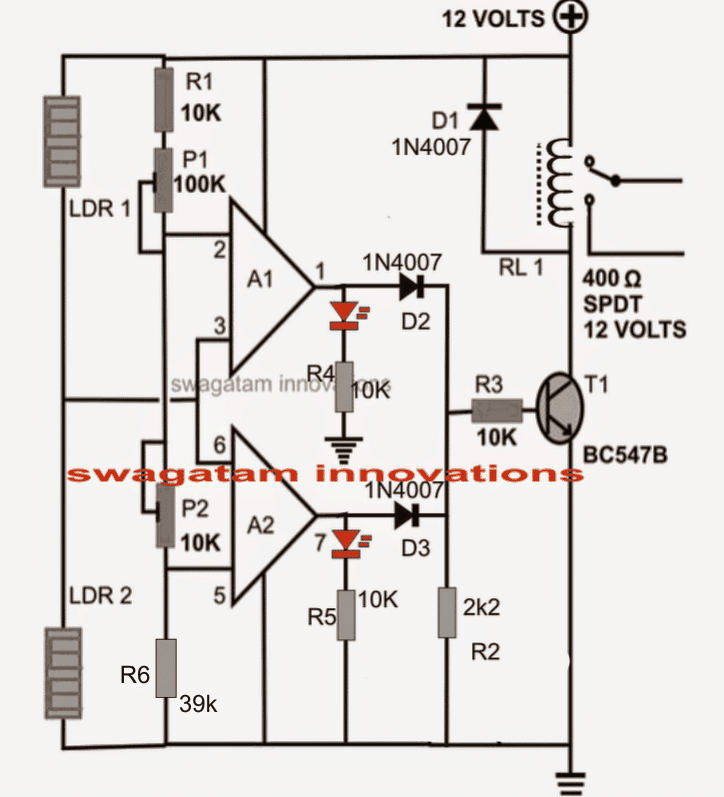
เครื่องส่งสัญญาณ IR และโฟโตไดโอดใช้เป็นไฟล์ ตัวถ่ายภาพ คู่ซึ่งสามารถใช้ในการตรวจจับเส้นทางที่ระบุสำหรับการเคลื่อนไหวของหุ่นยนต์ผู้ติดตามไลน์ขณะเดินและปีนกำแพง คู่ของโฟโตเซนเซอร์ให้สัญญาณที่เหมาะสมในการเปลี่ยนทรานซิสเตอร์สำหรับขับเคลื่อนมอเตอร์ของหุ่นยนต์ผู้ติดตามสาย
ขั้นที่ 5: ยานยนต์หุ่นยนต์ผู้ติดตามสายพร้อมกลไกการเดินและปีนเขา
มีมากมาย โครงการหุ่นยนต์สำหรับนักศึกษาวิศวกรรม ยานยนต์หุ่นยนต์ผู้ติดตามสายที่มีกลไกการเดินและปีนเขาเป็นโครงการที่สร้างสรรค์และน่าสนใจในการออกแบบด้วยตัวคุณเองโดยใช้ eBook ฟรีของเราในการออกแบบโครงการอิเล็กทรอนิกส์
การประยุกต์ใช้หุ่นยนต์ เพิ่มขึ้นอย่างรวดเร็วในชีวิตประจำวันของเราสำหรับฟังก์ชันต่างๆเช่นการเคลื่อนย้ายการใช้งานในอุตสาหกรรมหรือการยกสินค้าหนักการขนส่งภายในพื้นที่ จำกัด โดยทำตามเส้นทางเฉพาะการแปรรูปการเชื่อมเครื่องใช้ภายในบ้านหุ่นยนต์อิสระหุ่นยนต์ทางทหารเพื่อลดจำนวนมนุษย์ การมีส่วนร่วมและอันตรายหุ่นยนต์ทำงานร่วมกันสำหรับการโต้ตอบกับมนุษย์เช่นสำหรับการทำงานหลายอย่างหุ่นยนต์เพื่อการศึกษาหุ่นยนต์เคลื่อนที่และมนุษย์
คุณสนใจในการออกแบบ โครงการอิเล็กทรอนิกส์ ด้วยตัวคุณเอง? คุณรู้วิธีพัฒนาหุ่นยนต์คล้ายมนุษย์หรือไม่? หากคุณต้องการทราบข้อมูลเพิ่มเติมเกี่ยวกับโครงการหุ่นยนต์สำหรับนักศึกษาวิศวกรรมคุณสามารถโพสต์คำถามความคิดเห็นแนวคิดและข้อเสนอแนะในส่วนความคิดเห็นด้านล่างเพื่อขอความช่วยเหลือด้านเทคนิค