การเชื่อมต่อมอเตอร์กระแสตรงเข้ากับไมโครคอนโทรลเลอร์เป็นแนวคิดที่สำคัญมากในการใช้งานในอุตสาหกรรมและหุ่นยนต์ โดยการเชื่อมต่อมอเตอร์กระแสตรงเข้ากับไมโครคอนโทรลเลอร์เราสามารถควบคุมทิศทางของมอเตอร์ควบคุมความเร็วของมอเตอร์ได้ บทความนี้อธิบายถึงคุณ การควบคุมความเร็วของมอเตอร์กระแสตรงโดยใช้ 8051 ไมโครคอนโทรลเลอร์ ด้วยความช่วยเหลือของตัวควบคุมบลูทู ธ Android แผนภาพบล็อกแสดงด้านล่าง

บล็อกไดอะแกรมของการควบคุมความเร็วของมอเตอร์กระแสตรงโดยแอปพลิเคชัน Android
การควบคุมความเร็วของมอเตอร์กระแสตรงโดยแอปพลิเคชัน Android
การควบคุมความเร็วของมอเตอร์กระแสตรงโดยใช้มือถือ Android มีแอพพลิเคชั่นมากมายเช่นแอพพลิเคชั่นอุตสาหกรรมบันไดเลื่อนลิฟต์แอพพลิเคชั่นหุ่นยนต์และแอพพลิเคชั่นระบบรักษาความปลอดภัย ผู้ใช้จำเป็นต้องติดตั้งแอปพลิเคชัน Android บนสมาร์ทโฟน Android ของตน
ผู้ใช้สามารถส่งทิศทางเพื่อควบคุมความเร็วของมอเตอร์กระแสตรง การสื่อสารแบบไร้สาย Bluetooth ใช้เพื่อส่งคำสั่งไปยังผู้ใช้และตัวควบคุม ส่วนประกอบฮาร์ดแวร์หลักของวงจรคือไมโครคอนโทรลเลอร์ 8051, ไดรเวอร์มอเตอร์ L293D IC, มอเตอร์ DC, โมดูลบลูทู ธ และสมาร์ทโฟน Android
โปรดดูลิงก์นี้เพื่อทราบข้อมูลเพิ่มเติม ประวัติและข้อมูลเบื้องต้นเกี่ยวกับไมโครคอนโทรลเลอร์ 8051
กระแสไฟขาออกสูงสุดของขาไมโครคอนโทรลเลอร์คือ 15mA ที่ 5V แต่ไม่ทำให้การทำงานของมอเตอร์กระแสตรงและแม้แต่ EMF ด้านหลัง (แรงเคลื่อนไฟฟ้า) ซึ่งผลิตโดยมอเตอร์อาจเป็นอันตรายต่อไมโครคอนโทรลเลอร์
ดังนั้นจึงไม่สมควรที่จะเชื่อมต่อมอเตอร์กระแสตรงเข้ากับไมโครคอนโทรลเลอร์โดยตรง ดังนั้นจึงใช้วงจรขับมอเตอร์ (L293D IC) อินเทอร์เฟซมอเตอร์กระแสตรงและไมโครคอนโทรลเลอร์ .
ตัวขับมอเตอร์ (L293D)
L293D คือวงจรรวมตัวขับมอเตอร์สะพาน H คู่ (IC) ไดรเวอร์มอเตอร์ทำหน้าที่เป็นแอมพลิฟายเออร์ในปัจจุบันเนื่องจากรับสัญญาณควบคุมกระแสต่ำและให้สัญญาณที่มีกระแสสูงกว่า สัญญาณกระแสไฟฟ้าที่สูงขึ้นนี้ใช้ในการขับเคลื่อนมอเตอร์ L293D มีวงจรขับ H-bridge ในตัวสองวงจร . ในโหมดการทำงานทั่วไปสามารถขับเคลื่อนมอเตอร์ DC สองตัวพร้อมกันทั้งในทิศทางไปข้างหน้าและย้อนกลับ การทำงานของมอเตอร์ของมอเตอร์สองตัวสามารถควบคุมได้โดยใช้ลอจิกอินพุตที่พิน 2 และ 7 และ 10 และ 15
อินพุตลอจิก 00 หรือ 11 จะหยุดมอเตอร์ที่เกี่ยวข้อง ลอจิก 01 และ 10 จะหมุนในทิศทางตามเข็มนาฬิกาและทวนเข็มนาฬิกาตามลำดับ เปิดใช้งานพิน 1 และ 9 (ตรงกับมอเตอร์สองตัว) ต้องสูงเพื่อให้มอเตอร์เริ่มทำงาน เมื่ออินพุตเปิดใช้งานอยู่สูงไดรเวอร์ที่เกี่ยวข้องจะเปิดใช้งาน
เป็นผลให้เอาต์พุตทำงานและทำงานเป็นเฟสกับอินพุต ในทำนองเดียวกันเมื่ออินพุตเปิดใช้งานอยู่ในระดับต่ำไดรเวอร์นั้นจะถูกปิดใช้งานและเอาต์พุตจะปิดอยู่และอยู่ในสถานะอิมพีแดนซ์สูง แผนภาพพินและโครงสร้างภายในของ L293D IC แสดงไว้ด้านล่าง

Pin Diagram และโครงสร้างภายในของ L293D IC
Android คืออะไร?
ระบบปฏิบัติการ Android ทำงานบน Linux โดยได้รับการออกแบบมาสำหรับอุปกรณ์พกพาหน้าจอสัมผัสเช่นสมาร์ทโฟนและคอมพิวเตอร์แท็บเล็ตเป็นหลัก หนึ่งในระบบปฏิบัติการมือถือที่ใช้กันอย่างแพร่หลายในปัจจุบันคือ Android Android เป็นซอฟต์แวร์ที่ก่อตั้งขึ้นใน Palo Alto of California ในปี 2546

มือถือ Android
Android เป็นระบบปฏิบัติการที่มีประสิทธิภาพและรองรับแอพพลิเคชั่นจำนวนมากในสมาร์ทโฟน แอปพลิเคชั่นเหล่านี้สะดวกสบายและล้ำหน้ากว่าสำหรับผู้ใช้ ฮาร์ดแวร์ที่รองรับซอฟต์แวร์ Android นั้นใช้ แพลตฟอร์มสถาปัตยกรรม ARM .
Android เป็นระบบปฏิบัติการโอเพนซอร์สหมายความว่าฟรีและทุกคนสามารถใช้งานได้ Android มีแอพนับล้านที่สามารถช่วยคุณจัดการชีวิตของคุณไม่ทางใดก็ทางหนึ่งและมีให้บริการในราคาประหยัดในตลาดด้วยเหตุนี้ Android จึงได้รับความนิยมอย่างมาก
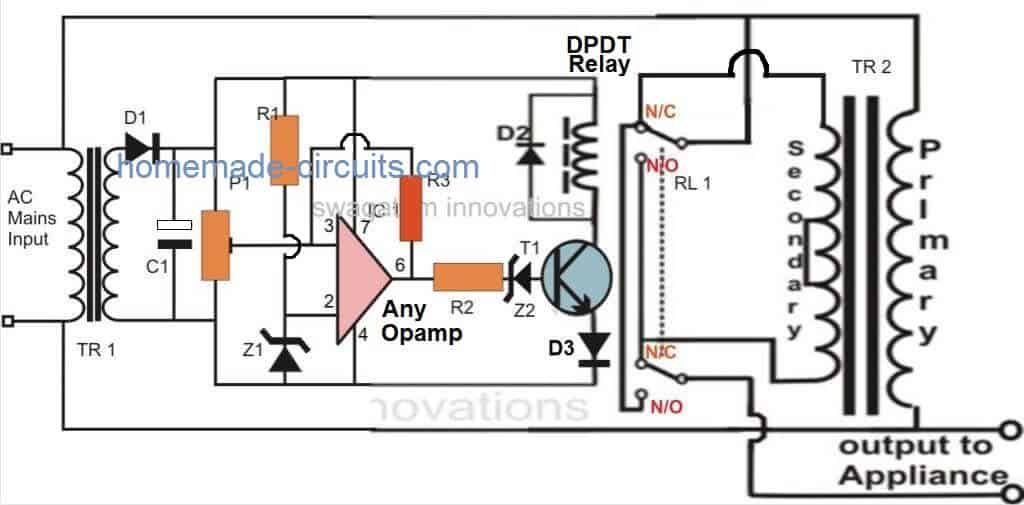
แผนผังแผนผังคำอธิบายการควบคุมความเร็วของมอเตอร์กระแสตรง
แผนผังของวงจรควบคุมความเร็วมอเตอร์กระแสตรงและคำอธิบายการทำงานได้ระบุไว้ด้านล่าง

แผนภาพ
วงจรใช้แหล่งจ่ายไฟมาตรฐานซึ่งประกอบด้วยหม้อแปลงแบบ step-down จาก 230V ถึง 12V และไดโอด 4 ตัวที่สร้างวงจรเรียงกระแสสะพานที่ให้กระแสตรงแบบพัลส์ซึ่งจะถูกกรองโดย ตัวเก็บประจุไฟฟ้า ประมาณ 470µF ถึง 1000µF
DC ที่กรองแล้วไม่ได้รับการควบคุม IC LM7805 ใช้เพื่อรับค่าคงที่ 5V DC ที่ขาหมายเลข 3 5V DC ที่มีการควบคุมจะถูกกรองเพิ่มเติมโดยตัวเก็บประจุไฟฟ้าขนาดเล็ก 10F สำหรับสัญญาณรบกวนใด ๆ
สัญญาณควบคุมจากอุปกรณ์ Android จะถูกส่งผ่านบลูทู ธ สัญญาณนี้จะสื่อสารกับไมโครคอนโทรลเลอร์ด้วยความช่วยเหลือของตัวส่งและตัวรับของอุปกรณ์ทั้งสอง สัญญาณนี้จะแสดงด้วยอักษรตัวเดียวซึ่งควบคุมความเร็วและทิศทางของมอเตอร์
วิธีควบคุมความเร็วของมอเตอร์ dc? ในโครงการนี้หลักการทำงานหลักคือพัลส์ PWM ถูกสร้างขึ้นจากไมโครคอนโทรลเลอร์ที่ตั้งโปรแกรมไว้เพื่อเปิดใช้งานพิน 1 ของ L293D เพื่อเพิ่มและลดรอบการทำงานของพัลส์ พัลส์หน้าที่เหล่านี้สามารถนำไปสู่การขับเคลื่อนมอเตอร์กระแสตรงไปในทิศทางที่เหมาะสมด้วยความเร็วเฉพาะ
การมอดูเลตความกว้างพัลส์
การมอดูเลตความกว้างพัลส์ ทำได้จากเอาต์พุตของไมโครคอนโทรลเลอร์ซึ่งได้รับการตั้งโปรแกรมอย่างถูกต้องเพื่อรับข้อมูลที่ได้รับจากอุปกรณ์บลูทู ธ ที่เชื่อมต่ออยู่ โมดูลบลูทู ธ หนึ่งตัวเชื่อมต่อกับไมโครคอนโทรลเลอร์อย่างถูกต้องสำหรับการไหลของข้อมูลแบบสองทิศทางในขณะที่โปรแกรมทำงานเพื่อพัฒนาพัลส์ PWM
แอปพลิเคชัน Android จากโทรศัพท์สมาร์ทโฟนใด ๆ จะสื่อสารผ่านบลูทู ธ ในตัวของโทรศัพท์ไปยังโมดูลบลูทู ธ ซึ่งเชื่อมต่อกับไมโครคอนโทรลเลอร์เพื่อให้ทำงานได้ตามต้องการ รอบหน้าที่การมอดูเลตความกว้างพัลส์แสดงไว้ด้านล่าง

PWM Duty Cycle
ปุ่มสัมผัสขึ้นบนสมาร์ทโฟนที่ใช้โปรแกรม Android ใช้สำหรับเพิ่มรอบการทำงานตามเวลาของ PWM ในขณะที่ปุ่มสัมผัสลงมีไว้เพื่อลดรอบการทำงาน

แอปพลิเคชั่น Android สำหรับการควบคุมความเร็วมอเตอร์ DC
มอเตอร์กระแสตรง ทำงานผ่าน IC ไดรเวอร์มอเตอร์ L293D ที่มีรอบการทำงานที่แตกต่างกันไปใช้เพื่อเปิดใช้งานพิน -1 ของ L293D ที่ป้อนจากไมโครคอนโทรลเลอร์เพื่อควบคุมความเร็ว หมุดข้อมูล LCD ที่เชื่อมต่อกับไมโครคอนโทรลเลอร์เพื่อแสดงเปอร์เซ็นต์ของความเร็วที่มอเตอร์กำลังทำงาน
ดังนั้นการควบคุมความเร็วของมอเตอร์ dc โดยใช้แอพพลิเคชั่น Android จึงเป็นวิธีที่คุ้มค่าใช้งานได้จริงและปลอดภัยที่สุดในการประหยัดพลังงาน สามารถใช้เทคนิค PWM (Pulse Width Modulation) อย่างง่ายเพื่อควบคุมความเร็วของมอเตอร์วงจรการทำงานของคลื่นจะควบคุมความเร็วของมัน การเปลี่ยนพอร์ตเอาต์พุตจะทำให้ทิศทางของมอเตอร์เปลี่ยนไปอย่างมีประสิทธิภาพ
นอกจากนี้ข้อสงสัยใด ๆ เกี่ยวกับบทความนี้โปรดให้คำแนะนำที่มีค่าของคุณโดยการแสดงความคิดเห็นในส่วนความคิดเห็นด้านล่าง คำถามนี้เป็นคำถามสำหรับคุณว่าอะไรคือการใช้อินเทอร์เฟซ DC Motor กับไมโครคอนโทรลเลอร์?